5.5: Тензори кривизни
- Page ID
- 77786

Приклад блохи говорить про те, що якщо ми хочемо висловити кривизну як тензор, вона повинна мати рівний ранг. Крім того, в системі координат, в якій координати мають одиниці відстані (вони не є кутами, наприклад, як у сферичних координатах), ми очікуємо, що одиниці кривизни завжди будуть зворотні відстані в квадраті. Інший спосіб поставити це полягає в тому, що якщо ми почнемо з нормальних координат, а потім масштабуємо всі координати на множник μ, тензор кривизни повинен зменшуватися\(\mu^{−2}\). (Див. Розділ 5.11, докладніше про цю тему.)
Поєднуючи ці два факти, ми виявимо, що тензор кривизни повинен мати одну з форм R ab R a bcd,., т. е., тобто кількість нижніх індексів має бути на два більше, ніж кількість верхніх індексів. Наступне визначення має цю властивість, і еквівалентно попереднім визначенням гаусової кривизни, які не були записані в тензорних позначеннях.
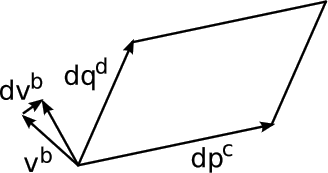
Визначення тензора кривизни Рімана: Нехай dp c і dq d будуть двома нескінченно малими векторами, і використовувати їх для формування чотирикутника, який є хорошим наближенням до паралелограма. 6 Паралельно-транспортний вектор v b весь шлях навколо паралелограма. Коли він повертається на початкове місце, він має нове значення v b → v b + dv b. Тоді тензор кривизни Рімана визначається як тензор, який обчислює dv a відповідно до dv a = R a bcd v b dp c dq d. (В літературі немає стандартизації порядку індексів.)
Примітка
У розділі 5.8 обговорюється сенс, в якому це наближення досить добре.
Приклад 7: Симетрія тензора Рімана
Якщо вектори dp c і dq d лежать уздовж однієї лінії, то dv a повинен зникнути, а змінюючи\(dp^c\) і\(dq^d\) просто змінює напрямок ланцюга навколо чотирикутника, даючи dv a → − dv a. Це показує, що R a bcd повинен бути антисиметричним при обміні індексів\(c\) і\(d\),
\[R^a_{bcd} = −R^a_{bdc}.\]
У локальних нормальних координатах інтерпретація тензора Рімана стає особливо прозорою. Лінії з постійними координатами є геодезичними, тому при транспортуванні вектора v b по відношенню до них він підтримує постійний кут. Тому будь-яке обертання вектора після його перенесення по периметру чотирикутника можна віднести до чогось, що відбувається у вершині. Іншими словами, це просто міра кутового дефекту. Тому ми можемо бачити, що тензор Рімана насправді є лише тензорним способом написання гаусової кривизни.
\[K = \frac{d \epsilon}{dA}.\]
У нормальних координатах локальна геометрія майже декартова, і коли ми приймаємо добуток двох векторів антисиметричним способом, ми по суті вимірюємо площу паралелограма, який вони охоплюють, як у тривимірному векторному перехресному добутку. Тому ми можемо бачити, що тензор Рімана говорить нам щось про величину кривизни, що міститься в нескінченно малій області, що охоплюється dp c і dq d. Кінцеву двовимірну область можна розбити на нескінченно малі елементи площі, а над ними інтегрується тензор Рімана. Результат дорівнює скінченній зміні\(\Delta\) v b в векторі, перенесеному навколо всієї межі області.
Приклад 8: Тензори кривизни на сфері
Знайдемо тензори кривизни на радіусній сфері\(\rho\).
Побудувати нормальні координати (x, y) з початком O, і нехай вектори dp c і dq d представляють нескінченно малі переміщення вздовж x і y, утворюючи чотирикутник, як описано вище. Тоді R x yxy представляє зміну напрямку x, що відбувається у векторі, який спочатку знаходиться у напрямку y. Якщо вектор має одиничну величину, то R x yxy дорівнює кутовому дефіциту чотирикутника. Порівнюючи з визначенням гаусової кривизни, знайдемо R x yxy = K =\(\frac{1}{\rho^{2}}\). Поміняючи x і y, ми знаходимо однаковий результат для R y xyx. Таким чином, хоча тензор Рімана в двох вимірах має шістнадцять складових, тільки ці дві є ненульовими, і вони рівні один одному.
Цей результат являє собою дефект паралельного транспортування навколо замкнутого контуру на одиницю площі. Припустимо, ми паралельно переносимо вектор навколо октанта, як показано на малюнку 5.4.2. Площа октанта є\((\frac{\pi}{2}) \rho^{2}\), і множивши її на тензор Рімана, ми виявляємо, що дефект паралельного транспорту є\(\frac{\pi}{2}\), тобто прямим кутом, що також видно з малюнка.
Вищевказане лікування може бути дещо оманливим, оскільки це може змусити вас повірити, що існує єдина система координат, в якій тензор Рімана завжди постійний. Це не так, оскільки розрахунок тензора Рімана був дійсним лише біля початку O нормальних координат. Характер цих координат стає досить складним далеко від O; ми закінчуємо всі наші постійні x лінії, що сходяться на північному та південному полюсах сфери, і всі постійні лінії на східному та західному полюсах.
Кутові координати більше\((\phi, \theta)\) підходять в якості масштабного опису сфери. Ми можемо використовувати закон тензорного перетворення, щоб знайти тензор Рімана в цих координатах. Якщо O, початок координат (x, y), знаходиться в координатах\((\phi, \theta)\), то\(\frac{dx}{d \phi} = \rho \sin \theta\) і\(\frac{dy}{d \theta} = \rho\). Результат -\(R^{\phi}_{\theta \phi \theta} = R^{x}_{yxy} (\frac{dy}{d \theta})^{2} = 1\) і\(R^{\theta}_{\phi \theta \phi} = R^{y}_{xyx} (\frac{dx}{d \phi})^{2} = \sin^{2} \theta\). Зміна не обумовлена будь-якою варіацією внутрішньої кривизни сфери; вона являє собою поведінку системи координат.\(R^{\theta}_{\phi \theta \phi}\)
Тензор Рімана вимірює лише кривизну в межах певної площини, визначеної dp c та dq d, тому це свого роду секційна кривизна. Оскільки ми зараз працюємо в двох вимірах, однак існує лише одна площина, і немає реальної різниці між кривизною секції та кривизною Річчі, що є середнім значенням кривизни перерізу по всіх площинам, які включають dq d: R cd = R a cad. Кривизна Річчі в двох просторових розмірах, виражених в нормальних координатах, - це просто діагональний матричний діаг (K, K).