3.5: Внутрішні кількості
- Page ID
- 77545

Моделі можуть бути небезпечними, оскільки вони можуть спокушати нас поставити фізичну реальність особливостям, які є суто зовнішніми, тобто, які присутні лише в цій конкретній моделі. Це на відміну від внутрішніх особливостей, які присутні у всіх моделям, і які, отже, логічно передбачаються аксіомами самої системи. Існування ліній явно є невід'ємною особливістю неевклідової геометрії, оскільки перетин ліній було визначено ще до того, як була запропонована будь-яка модель.
Приклад 4: Кривизна в еліптичній геометрії
А як щодо кривизни? У сферичній моделі еліптичної геометрії розмір сфери є оберненою мірою кривизни. Це дійсна внутрішня кількість, чи вона зовнішня? Це здається підозрілим, адже це особливість моделі. Якщо ми спробуємо визначити «розмір» як радіус R сфери, то явно є підстави для занепокоєння, оскільки це, здається, відноситься до центру сфери, але існування тривимірного евклідового простору всередині і зовні поверхні явно є зовнішньою особливістю моделі. Однак існує спосіб, за допомогою якого істота, обмежена поверхнею, може визначити R, будуючи геодезичний та афінний параметр уздовж цього геодезичного та вимірюючи відстань,\(\lambda\) накопичену, поки геодезичний не повернеться до початкової точки. Оскільки антиподальні точки ідентифікуються,\(\lambda\) дорівнює половині окружності сфери, а не всієї її окружності\(\frac{\lambda}{\pi}\), тому R =, цілком внутрішніми методами.
Приклад 5: Зовнішня кривизна
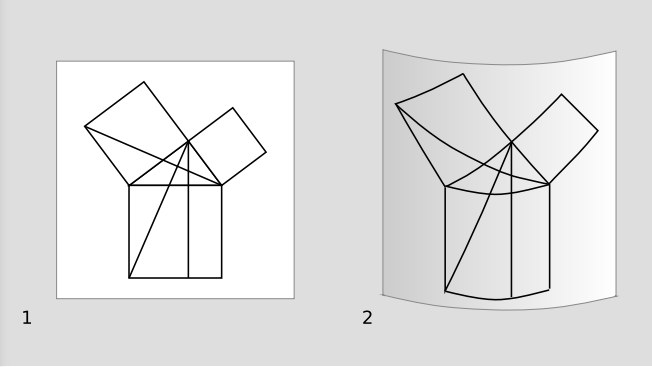
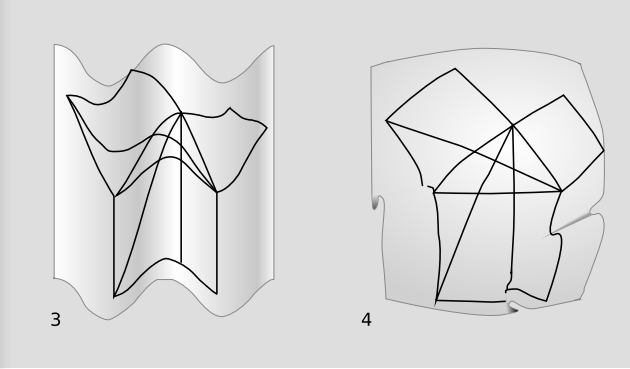
Аксіоми Евкліда E1-E5 відносяться до явних конструкцій. Якщо двовимірна істота може фізично перевірити їх усіх як описи двовимірного простору, яке вона населяє, то вона знає, що її простір є евклідовим, і що такі пропозиції, як теорема Піфагора, фізично дійсні в її Всесвіті. Але діаграма в а/1, що ілюструє доказ теореми Піфагора в Елементах Евкліда (пропозиція I.47), однаково справедлива, якщо сторінка згорнута на циліндр, 2 або сформована в хвилясту рифлену форму, 3. Ці типи кривизни, яких можна досягти без розриву або м'яття поверхні, є зовнішніми, а не внутрішніми. З криволінійних поверхонь на малюнку 3.4.1 лише сфера, 4, має внутрішню кривизну; діаграму неможливо оштукатурити на сферу без складання або різання та наклеювання.
Вправа\(\PageIndex{1}\)
Самостійна перевірка: Як би ідеї прикладу 5 застосовувалися до конуса?
Приклад 5 показує, що може бути важко винюхати фіктивні зовнішні особливості, які здаються внутрішніми, і приклад 4 передбачає доцільність розробки методів обчислення, які ніколи не посилаються на будь-які зовнішні величини, так що нам ніколи не доведеться турбуватися, чи такий символ, як R, дивиться на нас з шматка папір є невід'ємною. Ось чому школяреві загальної теорії відносності навряд чи буде корисно підібрати книгу з диференціальної геометрії, яка була написана без загальної теорії відносності конкретно на увазі. Такі книги мають тенденцію випадково змішувати між собою внутрішні і зовнішні позначення. Наприклад, векторний перехресний добуток a × b відноситься до вектора, який тикає з площини, зайнятої a і b, і простір поза площиною може бути зовнішнім; неочевидно, як узагальнити цю операцію до 3+1 вимірів відносності (оскільки перехресний продукт - це тривимірний звір), і навіть якби це було, ми не могли бути впевнені, що він матиме якесь внутрішньо чітко визначене значення.
Координувати незалежність
Щоб побачити, як діяти у створенні явно внутрішньої нотації, розглянемо два типи внутрішніх спостережень, які доступні в загальній теорії відносності:
- 1. Ми можемо визначити, чи події та світові лінії є інцидентами: перетинаються чи ні дві лінії, збігаються дві події, або подія лежить на певній лінії.
Вимірювання захворюваності, наприклад виявлення гравітаційного лінзування, є глобальними, але вони є єдиними глобальними спостереженнями, які ми можемо зробити. 4 Якби ми були повністю обмежені випадковістю, простор-час був би описаний суворою системою проективної геометрії, геометрією без паралелей або вимірювань. У проективній геометрії всі пропозиції по суті є твердженнями про комбінаторику, наприклад, що неможливо посадити сім дерев так, щоб вони утворювали сім ліній по три дерева кожна.
Примітка
Ейнштейн називав вимірювання випадковості як «визначення збігів просторового часу». Про його виклад цієї ідеї див. Додаток А.
Але:
- 2. Ми також можемо робити вимірювання в місцевих кадрах Лоренца.
Це дає нам більше сили, але не стільки, скільки ми могли б очікувати. Припустимо, ми визначаємо координату, таку як t або x У ньютонівській механіці ці координати утворювали б заздалегідь заданий фон, попередньо існуючий етап для акторів. У відносності, з іншого боку, розглянемо абсолютно довільну зміну координат виду x → x' = f (x), де f - гладка функція один до одного. Наприклад, ми могли б мати x → x + px 3 + q sin (rx) (при цьому p і q вибрано досить малі, щоб відображення завжди було один-на-один). Оскільки відображення є один до одного, нова система координат зберігає всі відносини випадковості. Оскільки відображення плавне, нова система координат все ще сумісна з існуванням локальних кадрів Лоренца. Отже, різниця між двома системами координат є повністю зовнішньою, і ми робимо висновок, що явно внутрішнє позначення повинно уникати будь-якого явного посилання на систему координат. Тобто, якщо ми запишемо розрахунок, в якому з'являється символ, такий як х, нам потрібно переконатися, що ніде в позначеннях немає прихованого припущення, що х походить з якоїсь певної системи координат. Наприклад, рівняння все ще має бути дійсним, якщо узагальнений символ x пізніше приймається для відображення відстані r від якогось центру симетрії. Ця властивість координатно-незалежності також відома як загальна коваріація, і цей тип плавної зміни координат також називається дифеоморфізмом.
Приклад 6:
Як екзотичний приклад зміни координат візьміть тор і позначте його координатами\(( \theta, \varphi)\), де\(\theta + 2 \pi\) приймається те ж саме\(\theta\), що і аналогічно для\(\varphi\). Тепер підпорядкуйте його координатному перетворенню T\(\theta \rightarrow \theta + \varphi\), визначеному тим, що схоже на відкриття тора, скручування його повним колом, а потім з'єднання кінців назад разом. T відомий як «поворот Дена», і він відрізняється від більшості координатних перетворень, які ми робимо в відносності, тому що це не може бути зроблено плавно, тобто немає безперервної функції f (x) на 0 ≤ x ≤ 1 таким чином, що кожне значення f є плавним перетворенням координат, f (0) - перетворення ідентичності, і f (1) = Т.
Переміщення кадрів на c?
Хорошим застосуванням цих ідей є питання про те, як би виглядав світ у системі відліку, що рухається зі швидкістю світла. Це питання має довгу і почесну історію. Будучи молодим студентом, Ейнштейн намагався уявити, як буде виглядати електромагнітна хвиля з точки зору мотоцикліста, який їде поруч з нею. Тепер ми знаємо, завдяки самому Ейнштейну, що говорити про таких спостерігачів дійсно немає сенсу.
Найбільш простий аргумент заснований на позитивістській ідеї, що поняття означають лише щось, якщо ви можете визначити, як їх виміряти операційно. Якщо ми приймемо цю філософську позицію (яка аж ніяк не сумісна з кожною концепцією, яку ми коли-небудь обговорюємо у фізиці), то нам потрібно вміти фізично реалізувати цей кадр з точки зору спостерігача і вимірювальних приладів. Але ми не можемо Це займе нескінченну кількість енергії, щоб прискорити Ейнштейна і його мотоцикл до швидкості світла.
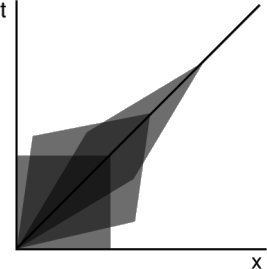
Оскільки аргументи з позитивізму часто можуть знищити абсолютно цікаві та розумні поняття, ми можемо запитати, чи є інші причини, щоб не допускати таких кадрів. Є. Нагадаємо, що ми розмістили дві технічні умови на координатні перетворення: вони повинні бути плавними і один-на-один. Стан гладкості пов'язаний з неможливістю підштовхнути мотоцикл Ейнштейна в рамі швидкості світла будь-яким безперервним класичним процесом. (Відносність - класична теорія.) Але незалежно від цього, у нас є проблема з вимогою один до одного. На малюнку 3.4.2 показано, що станеться, якщо ми зробимо серію підсилень Лоренца до вищих і вищих швидкостей. Повинно бути зрозуміло, що якби ми могли зробити прискорення до швидкості c, ми б здійснили перетворення координат, яке не було один до одного. Кожна точка на площині буде відображена на одній світлоподібній лінії.