9.4: Коваріантна похідна
- Page ID
- 77226

Цілі навчання
- Постійна векторна функція, або для будь-якого тензора вищого рангу змінюється при вираженні в новій системі координат
У цьому необов'язковому розділі ми розглядаємо питання, порушені в розділі 7.5. Там ми відзначили, що в немінковських координатах не можна наївно використовувати зміни складових вектора як міру зміни самого вектора. Постійна скалярна функція залишається постійною, коли вона виражена в новій системі координат, але те ж саме не вірно для постійної векторної функції або для будь-якого тензора вищого рангу. Це пов'язано з тим, що зміна координат змінює одиниці, в яких вимірюється вектор, і якщо зміна координат нелінійна, одиниці змінюються від точки до точки. Ця тема логічно не належить до цієї глави, але я розмістив її тут, тому що її не можна чітко обговорювати, не охопивши тензори рангу вище одного.

Розглянемо одновимірний випадок, в якому вектор\(v^a\) має тільки одну складову, а метрика також є єдиним числом, щоб ми могли опустити індекси і просто записати\(v\) і\(g\). (Ми просто повинні пам'ятати, що\(v\) це дійсно вектор, хоча ми залишаємо верхній індекс.) Якщо постійна,\(v\) то її похідна\(dv/ dx\), обчислена звичайним способом без жодного коригувального терміну, дорівнює нулю. Якщо далі припустити, що метрика - це просто постійна\(g = 1\), то нуль - це не просто відповідь, а правильна відповідь.
Тепер припустимо, що ми трансформуємося в нову систему координат\(X\), і метрика\(G\), виражена в цій системі координат, не є постійною. Застосовуючи закон тензорного перетворення, ми маємо\(V = v\frac{\mathrm{d} X}{\mathrm{d} x}\), і диференціація по відношенню до нуля не\(X\) дасть, тому що коефіцієнт\(dX/ dx\) не постійний. Це неправильна відповідь: насправді\(V\) не змінюється, він просто, здається, змінюється, тому що\(G\) робить.
Ми хочемо додати коригувальний термін до похідного оператора\(d/ dX\), утворюючи новий похідний оператор\(∇_X\), який дає правильну відповідь. \(∇_X\)називається коваріантною похідною. Цей коригувальний термін легко знайти, якщо врахувати, яким повинен бути результат при диференціації самої метрики. Загалом, якщо тензор, здається, змінюється, він може змінюватися або тому, що він дійсно змінюється, або тому, що показник змінюється. Якщо сама метрика змінюється, це може бути або тому, що метрика дійсно змінюється, або.. тому що метрика змінюється. Іншими словами, немає розумного способу призначити ненульову коваріантну похідну самій метриці, тому ми повинні мати\(∇_X G = 0\). Тому необхідна корекція полягає у\(d/ dX\) заміні на
\[\nabla _X = \frac{\mathrm{d} }{\mathrm{d} X} - G^{-1}\frac{\mathrm{d} G}{\mathrm{d} X}\]
Застосовуючи це до\(G\) дає нуль. \(G\)тензор другого рангу з двома нижчими індексами. Якщо застосувати ту ж корекцію до похідних інших тензорів цього типу, ми отримаємо ненульові результати, і вони будуть правильними ненульовими результатами. Математично форма похідної є\(\frac{1}{y}\; \frac{\mathrm{d} y}{\mathrm{d} x}\), яка відома як логарифмічна похідна, так як вона дорівнює\(\frac{\mathrm{d} (\ln y)}{\mathrm{d} x}\). Він вимірює мультиплікативну швидкість зміни\(y\). Наприклад, якщо\(y\) масштабується в рази,\(k\) коли\(x\) збільшується на\(1\) одиницю, то логарифмічна похідна\(y\) є\(\ln k\). Логарифмічна похідна від\(e^{cx}\) is\(c\). Логарифмічний характер коригувального терміна до\(∇_X\) є хорошою справою, оскільки дозволяє нам приймати зміни масштабу, які є мультиплікативними змінами, і перетворювати їх в адитивні поправки до похідного оператора. Аддитивність поправок необхідна, якщо результат коваріантної похідної повинен бути тензором, оскільки тензори є адитивними істотами. Як щодо величин, які не є коваріантними тензорами другого рангу? При масштабуванні координат на множник ковектори масштабуються по\(k\)\(k^{-1}\), а тензори другого рангу з двома нижчими індексами масштабуються на\(k^{-2}\). Тому термін корекції повинен бути вдвічі менше для ковекторів,
\[\nabla _X = \frac{\mathrm{d} }{\mathrm{d} X} - \frac{1}{2}G^{-1}\frac{\mathrm{d} G}{\mathrm{d} X}\]
і повинен мати протилежний знак для векторів.
Узагальнюючи термін корекції до похідних векторів в більш ніж одному вимірі, ми повинні мати щось такого вигляду:
\[\nabla _a v^b = \partial _a v^b + \Gamma ^b\: _{ac} v^c\]
\[\nabla _a v^b = \partial _a v^b - \Gamma ^c\: _{ba} v_c\]
де\(Γ^b\: _{ac}\), званий символом Крістоффеля, не трансформується як тензор, а включає в себе похідні метрики. («Крістоффель» вимовляється «Кріст-жахливий», з наголосом на середньому складі.)
Важливим є те, що коли ми оцінюємо певний компонент коваріантної похідної\(∇_2 v^3\), наприклад, результат може бути ненульовим, навіть якщо компонент\(v^3\) зникає однаково.
Приклад\(\PageIndex{1}\): Christoffel symbols on the globe
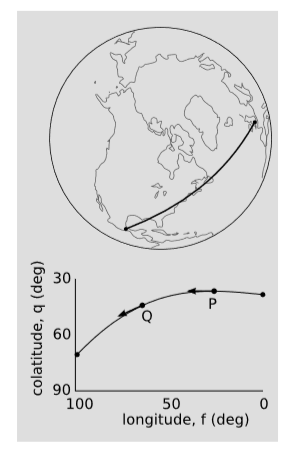
Як якісний приклад розглянемо траєкторію літака, показану на малюнку\(\PageIndex{2}\), від Лондона до Мехіко. Ця траєкторія є найкоротшою між цими двома точками; така траєкторія мінімальної довжини називається геодезичною. У фізиці прийнято працювати з широтою\(θ\), виміряної вниз від північного полюса, а не широтою, виміряної від екватора. На\(P\), над Північною Атлантикою, широта літака має мінімум. (Ми бачимо, не беручи це на віру з фігури, що такий мінімум повинен відбутися. Найпростіший спосіб переконати себе в цьому - розглянути шлях, який йде прямо через жердину, в\(θ = 0\).)
На\(P\), вектор швидкості літака вказує прямо на захід. На\(Q\), над Новою Англією, його швидкість має велику складову на південь. Оскільки шлях є геодезичним, а площина має постійну швидкість, вектор швидкості просто паралельно транспортується; коваріантна похідна вектора дорівнює нулю. Оскільки ми маємо\(v_θ = 0\) на\(P\), єдиний спосіб пояснити ненульове і додатне значення\(∂_φ v^θ\) є те, що у нас є ненульове і від'ємне значення\(Γ^θ\: _{φφ}\).
За симетрії ми можемо зробити висновок, що\(Γ^θ\: _{φφ}\) має мати позитивне значення в південній півкулі, і повинні зникати на екваторі.
\(Γ^θ\:_{φφ}\)обчислюється в прикладі нижче.
Симетрія також вимагає, щоб цей символ Крістоффеля був незалежним від\(φ\), і він також повинен бути незалежним від радіуса сфери.
Щоб обчислити коваріантну похідну тензора вищого рангу, ми просто додаємо більше коригувальних термінів, наприклад,
\[\nabla _a U_{bc} = \partial _a U_{bc} - \Gamma ^d\: _{ba}U_{dc} - \Gamma ^d\: _{ca}U_{bd}\]
або
\[\nabla _a U_{b}^c = \partial _a U_{b}^c - \Gamma ^d\: _{ba}U_{d}^c - \Gamma ^c\: _{ad}U_{b}^d\]
При частковій\(∂_µ\) похідній немає сенсу використовувати метрику для підняття індексу і форми\(∂_µ\). Це має сенс робити це з коваріантними похідними, так само\(\nabla ^a = g^{ab} \nabla _b\) є правильною ідентичністю.
Позначення коми, крапки з комою та пташиних доріжок
Деякі автори використовують надскрипти з комами і крапками з комою для позначення часткових і коваріантних похідних. Наступні рівняння дають еквівалентні позначення для одних і тих же похідних:
\[\partial _\mu = \frac{\partial }{\partial x^\mu }\]
\[\partial _\mu X_\nu = X_{\nu ,\mu }\]
\[\nabla _a X_b = X_{b;a}\]
\[\nabla ^a X_b = X_b\: ^{;a}\]
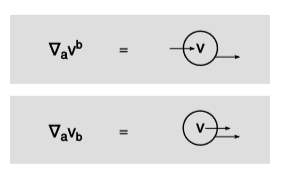
\(\PageIndex{3}\)На малюнку показані два приклади відповідних позначень пташиних доріжок. Оскільки пташині сліди мають на увазі бути явно координатниминезалежними, вони не мають способу вираження нековаріантних похідних.
Знаходження символу Крістоффеля з метрики
Ми вже знайшли символ Крістоффеля з точки зору метрики в одному вимірі. Висловлюючи його в тензорних позначеннях, ми маємо
\[\Gamma ^d\: _{ba} = \frac{1}{2}g^{cd}(\partial _? g_{??})\]
де інверсія однокомпонентної матриці\(G\) була замінена інверсією матриці, і, що ще важливіше, знаки питання вказують на те, що було б кілька способів розмістити індекси так, щоб результатом було граматичне тензорне рівняння. Найбільш загальною формою для символу Крістоффеля було б
\[\Gamma ^b\: _{ac} = \frac{1}{2}g^{db}(L\partial _c g_{ab} + M\partial _a g_{cb} + N\partial _b g_{ca})\]
де\(L\)\(M\), і\(N\) є константами. Послідовність з одновимірним виразом вимагає\(L + M + N = 1\). Умова\(L = M\) виникає на фізичних, а не математичних підставах; це відображає той факт, що експерименти не показали доказів ефекту, званого крутінням, при якому вектори певним чином оберталися б при транспортуванні. \(M\)Терміни\(L\) та терміни мають інше фізичне значення, ніж\(N\) термін.
Припустимо, спостерігач використовує такі координати, що всі об'єкти описуються як подовжуються з часом, а зміна масштабу, накопиченого за один день, є фактором\(k > 1\). Це описується похідною\(∂_t g_{xx} < 1\), яка впливає на\(M\) термін. Оскільки метрика використовується для обчислення квадратних відстаней, елемент\(g_{xx}\) матриці масштабується вниз на\(1/√k\). Щоб компенсувати\(∂_t v^x < 0\), тому нам потрібно додати позитивний термін корекції\(M > 0\), до коваріантної похідної. Коли той самий спостерігач вимірює швидкість зміни\(v^t\) вектора щодо простору, швидкість зміни виявляється занадто маленькою, оскільки змінна, яку вона диференціює щодо, занадто велика. Для цього потрібно\(N < 0\), і корекція того ж розміру, що і\(M\) корекція, так\(|M| = |N|\). Знаходимо\(L = M = -N = 1\).
Самоперевірка: чи залежить вищевказаний аргумент від використання простору для однієї координати та часу для іншої?
Отриманий загальний вираз для символу Крістоффеля в терміні метрики дорівнює
\[\Gamma ^c\: _{ab} = \frac{1}{2}g^{cd}(\partial _a g_{bd} + \partial _b g_{ad} - \partial _d g_{ab})\]
Можна повернутися назад і перевірити, що це дає\(\nabla _c g_{ab} = 0\).
Самоперевірка: У випадку\(1\) розміру, показати, що це зводиться до більш раннього результату\(-\frac{1}{2}\frac{\mathrm{d} G}{\mathrm{d} X}\).
\(Γ\)не є тензором, тобто він не трансформується відповідно до правил тензорного перетворення. Оскільки це\(Γ\) не тензор, не очевидно, що коваріантна похідна, яка побудована з нього, є тензорною. Але якщо це не очевидно, це також не дивно - мета вищевказаного деривації полягала в тому, щоб отримати результати, які були б незалежними від координат.
Приклад\(\PageIndex{2}\): Christoffel symbols on the globe, quantitatively
У\(\PageIndex{1}\) прикладі ми зробили висновок про наступні властивості символу Крістоффеля\(Γ^θ\: _{φφ}\) на радіусній сфері\(R: Γ^θ\: _{φφ}\) не залежить від\(φ\) і\(R\),\(Γ^θ\: _{φφ} < 0\) в північній півкулі (колатида\(θ\) менше\(π/2\)),\(Γ^θ\: _{φφ} = 0\) на екваторі, і\(Γ^θ\: _{φφ} > 0\) в південній півкулі.
Метрика на сфері є\(ds^2 = R^2 dθ^2 + R^2 sin^2 θdφ^2\). Єдиним терміном, що не зникає у виразі for\(Γ^θ\: _{φφ}\), є той, який включає\(∂_θ g_{φφ} = 2R^2 sinθcosθ\). Результат\(Γ^θ\: _{φφ} = -sinθcosθ\), який можна перевірити, щоб мати властивості, заявлені вище.
геодезичне рівняння
Світова лінія - це часоподібна крива в просторі-часі. Як особливий випадок, деякі такі криві насправді не вигнуті, а прямі. Фізично ті, які ми вважаємо прямими, - це ті, які можуть бути світовою лінією тестової частинки, на яку не діють будь-які негравітаційні сили (розділ 5.1). Математично ми покажемо в цьому розділі, як символи Крістоффеля можуть бути використані для пошуку диференціальних рівнянь, що описують такий рух. Світова лінія тестової частинки називається геодезичної. Рівняння також мають рішення, які є космічними або світлоподібними, і ми також вважаємо їх геодезичними.
Геодезики відіграють ту ж роль у відносності, яку грають прямі лінії в евклідовій геометрії. У евклідовій геометрії ми можемо вказати дві точки і попросити криву, що з'єднує їх, яка має мінімальну довжину. Відповідь - рядок. У спеціальній теорії відносності часова геодезична максимізує належний час (розділ 2.4) між двома подіями.
У спеціальній теорії відносності геодезичні дані задаються лінійними рівняннями при вираженні в координатах Мінковського, а вектор швидкості тестової частинки має постійні складові при вираженні в координатах Мінковського. Взагалі відносність координат Мінковського не існує, а геодезичні об'єкти не мають тих властивостей, які ми очікуємо на основі евклідової інтуїції; наприклад, спочатку паралельні геодезії можуть згодом сходитися або розходитися.
характеристика геодезичної
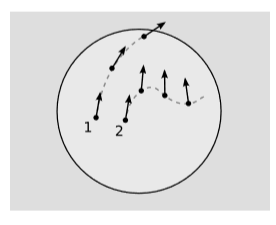
Геодезичну можна визначити як світову лінію, яка зберігає дотичність при паралельному транспорті, фігурі\(\PageIndex{4}\). Це, по суті, математичний спосіб вираження поняття, яке ми раніше висловлювали більш неофіційно з точки зору «перебування на курсі» або переміщення «інерційно». (З причин, більш детально розглянутих нижче, це визначення краще, ніж визначення геодезичної як кривої екстремальної або стаціонарної метричної довжини.)
Криву можна задати, надавши функції\(x^i(λ)\) для її координат, де\(λ\) є дійсним параметром. Вектор, що лежить дотичною до кривої, потім можна обчислити за допомогою часткових похідних,\(T^i = ∂x^i/∂λ\). Існує три способи, за допомогою яких векторна функція\(λ\) може змінюватися:
- він може змінитися з банальної причини, що метрика змінюється, так що його компоненти змінюються при вираженні в новій метриці
- він може змінювати свої компоненти перпендикулярно кривій; або
- він міг змінювати свою складову паралельно кривій.
Можливість 1 насправді не повинна вважатися зміною взагалі, і визначення коваріантної похідної спеціально розроблено для того, щоб бути нечутливим до такого роду речей. 2 не може застосовуватися до\(T^i\), яка є дотичною за конструкцією. Тому було б зручно, якби\(T^i\) траплялося завжди однакової довжини. Якщо так, то 3 також не станеться, і ми могли б повторно висловити визначення геодезичного, сказавши, що коваріантна похідна дорівнює нулю.\(T^i\) З цієї причини ми будемо вважати для решти цього розділу, що параметризація кривої має цю властивість. У ньютонівському контексті ми могли б уявити, що\(x^i\) це чисто просторові\(λ\) координати і бути універсальною часовою координатою. Потім ми інтерпретуємо\(T^i\) як швидкість, і обмеження полягало б у параметризації, що описує рух з постійною швидкістю. У відносності обмеження полягає в тому, що\(λ\) повинно бути афінним параметром. Наприклад, це може бути належний час частинки, якщо крива, про яку йде мова, є часовою.
Коваріантна похідна по параметру
Позначення у наведеному вище розділі не зовсім адаптоване до наших теперішніх цілей, оскільки дозволяє висловити коваріантну похідну щодо однієї з координат, але не стосовно такого параметра, як\(λ\). Ми хотіли б відзначити коваріантну\(T^i\) похідну щодо\(λ\) as\(∇_λ T^i\), хоча\(λ\) це не координата. Для з'єднання двох типів похідних ми можемо використовувати загальну похідну. Щоб зрозуміти ідею, ось як ми обчислюємо загальну похідну для скалярної функції\(f(x,y)\), без тензорних позначень:
\[\frac{\mathrm{d} f}{\mathrm{d} \lambda } = \frac{\partial f}{\partial x} \frac{\partial x}{\partial \lambda } + \frac{\partial f}{\partial y} \frac{\partial y}{\partial \lambda }\]
Це всього лише узагальнення правила ланцюга до функції двох змінних. Наприклад, якщо\(λ\) представляє час і\(f\) температуру, то це скаже нам про швидкість зміни температури, оскільки термометр проводився через простір. Застосовуючи це до цієї задачі, ми виражаємо загальну коваріантну похідну як
\[\begin{align*} \nabla _{\lambda } T^i &= (\nabla _b T^i)\frac{\mathrm{d} x^b}{\mathrm{d} \lambda }\\ &= (\partial _b T^i + \Gamma ^i \: _{bc}T^c)\frac{\mathrm{d} x^b}{\mathrm{d} \lambda } \end{align*}\]
геодезичне рівняння
Визнаючи\(\partial _b T^i \frac{\mathrm{d} x^b}{\mathrm{d} \lambda }\) як сумарну нековаріантну похідну, знаходимо
\[\nabla _{\lambda } T^i = \frac{\mathrm{d} T^i}{\mathrm{d} \lambda } + \Gamma ^i\: _{bc} T^c \frac{\mathrm{d} x^b}{\mathrm{d} \lambda }\]
Підставивши\(\frac{\partial x^i}{\partial\lambda }\) і встановивши коваріантну похідну рівну нулю, отримаємо\(T^i\)
\[\frac{\mathrm{d}^2 x^i}{\mathrm{d} \lambda ^2} + \Gamma ^i\: _{bc} \frac{\mathrm{d} x^c}{\mathrm{d} \lambda }\frac{\mathrm{d} x^b}{\mathrm{d} \lambda } = 0\]
Це відоме як геодезичне рівняння.
Якщо це диференціальне рівняння задовольняється для одного афінного параметра\(λ\), то воно також задовольняється для будь-якого іншого афінного параметра\(λ' = aλ + b\), де\(a\) і\(b\) є константами. Нагадаємо, що афінні параметри визначаються тільки уздовж геодезичних, а не за довільними кривими. Ми не можемо почати з визначення афінного параметра, а потім використовувати його для пошуку геодезичних за допомогою цього рівняння, тому що ми не можемо визначити афінний параметр без попереднього визначення геодезичного. Так само ми не можемо зробити геодезичний спочатку, а потім афінний параметр, тому що якби у нас вже був геодезичний в руці, нам не знадобиться диференціальне рівняння, щоб знайти геодезичне. Рішення цієї курячо-яєчної загадки полягає в тому, щоб записати диференціальні рівняння і спробувати знайти рішення, не намагаючись заздалегідь вказати ні афінний параметр, ні геодезичний.
Геодезичне рівняння корисно при встановленні однієї з необхідних теоретичних основ відносності, яка полягає в єдиності геодезичних для заданого набору початкових умов. Якби геодезичні не були однозначно визначені, то частинки не мали б можливості вирішити, як рухатися. Форма геодезичного рівняння гарантує унікальність, оскільки з її допомогою можна визначити алгоритм, який будує геодезичний для заданого набору початкових умов.
Не характеризуються як криві стаціонарної довжини
Геодезичне рівняння може здатися громіздким. Чому б просто не визначити геодезичну як криву, що з'єднує дві точки, яка максимізує або мінімізує власну метричну довжину? Проблема в тому, що це не узагальнює добре криві, які не схожі на час. Випадковий читач, можливо, побажає пропустити залишок цього підрозділу, в якому обговорюється цей момент.
Для\(σ\) просторового випадку ми хотіли б визначити належну метричну довжину кривої як\(\sigma = \int \sqrt{-g{ij} dx^i dx^j}\), знак мінус необхідний, тому що ми використовуємо метрику з підписом\(+---\), і ми хочемо, щоб результат був реальним. Величина\(σ\) може бути розглянута як результат, який ми отримаємо, наблизивши криву ланцюгом коротких відрізків лінії та додаючи їх належні довжини. У випадку, коли вся крива лежить у площині одночасності для деякого спостерігача,\(σ\) є евклідова довжина кривої, виміряна цим спостерігачем. Наш не\(σ\) є ні максимумом, ні мінімумом для космічної геодезичної, що з'єднує дві події. Щоб побачити це, виберіть кадр, в якому дві події одночасні, і прийняти координати Мінковського таким чином, щоб точки обидва лежали на\(x\) -осі. Деформування геодезичної в\(xy\) площині робить те, що ми очікуємо відповідно до евклідової геометрії: вона збільшує довжину. Деформуючи його в\(xt\) площині, однак, зменшує довжину (як стає очевидним при розгляді випадку великої деформації, яка перетворює геодезичну криву нульової довжини, що складається з двох світлоподібних відрізків лінії). Результатом є те, що геодезичний не є ні мінімізатором, ні максимізатором\(σ\).
Максимізація або мінімізація належної довжини є сильною вимогою. Пов'язаний, але більш допустимий критерій для застосування до кривої, що з'єднує дві фіксовані точки, полягає в тому, що якщо ми змінимо криву на деяку невелику величину, зміна довжини повинна зникнути до першого порядку. Наприклад, дві точки\(A\) і\(B\) на поверхні землі визначають велике коло, тобто коло, окружність якого дорівнює окружності землі. Це велике коло дає нам два різні шляхи, за якими ми могли б подорожувати від\(A\) до\(B\). Один з них зазвичай буде довшим, ніж інший. Обидва вони настільки прямі, наскільки вони можуть бути, тримаючись на поверхні землі, тому в цьому контексті сферичної геометрії вони обидва вважаються геодезичними. Одна річ, яку мають спільні два шляхи, полягає в тому, що вони обидва нерухомі. Стаціонарність визначається наступним чином. З огляду на певну параметризовану криву\(γ(t)\), давайте зафіксуємо певний вектор\(h(t)\) у кожній точці кривої, яка є дотичною до земної поверхні, і нехай\(h\) буде безперервна функція,\(t\) яка зникає в кінцевих точках. Тоді якщо він невеликий в порівнянні з радіусом землі, ми можемо чітко визначити, що означає\(γ\) обурювати\(h\), виробляючи ще одну криву,\(γ∗\) подібну, але не таку, як,\(γ\). Стаціонарність означає, що різниця в довжині між\(γ\) і\(γ∗\) є порядком\(2\) для малого. Це узагальнення поняття елементарного числення про те, що функція має нульову похідну поблизу екстремуму або точки перелому. У нашому прикладі на поверхні землі дві геодезики\(B\) з'єднують\(A\) і обидві стаціонарні.
Космічні геодезики в спеціальній теорії відносності є стаціонарними за вищевказаним визначенням. Однак це твердження може ввести в оману. Оскільки ми будуємо переміщення як продукт\(h\), його похідна також гарантовано зменшиться пропорційно для малого. Ми могли б трохи послабити цю вимогу, і лише вимагати, щоб величина зміщення була порядковою. При цьому можна показати, що просторові криві не є нерухомими. Наприклад, будь-яка просторова крива може бути наближена до довільного ступеня точності ланцюжком світлоподібних геодезичних сегментів. Таким чином, довільно мале збурення в кривій зводить її довжину до нуля.
Ситуація стає ще гірше для світлоподібних геодезичних робіт. Тут ми повинні були б визначити, що таке «довжина». Ми могли б або взяти абсолютне значення\(L = \int \sqrt{|g{ij} dx^i dx^j|}\), або ні,\(L = \int \sqrt{g{ij} dx^i dx^j}\). Якщо ми не беремо абсолютне значення, не\(L\) повинні бути реальними для невеликих варіацій геодезичного, і тому ми не маємо чітко визначеного порядку, і не можемо сказати, чи\(L\) є максимумом, мінімумом чи ні. Незалежно від того, чи приймаємо ми абсолютне значення, ми маємо\(L = 0\) для світлоподібного геодезичного, але функція квадратного кореня не має диференційовну поведінку, коли його аргумент дорівнює нулю, тому ми не маємо стаціонарності. Якщо ж взяти абсолютне значення, то для геодезичної кривої довжина дорівнює нулю, що є максимально коротким. Однак можна мати негеодезичні криві нульової довжини, такі як світлоподібна гвинтова крива навколо\(t\) -осі.