3.5: Вектори швидкості та прискорення
- Page ID
- 77310

Цілі навчання
- Поясніть вектор швидкості і вектор прискорення
Вектор швидкості
На курсі першокурсника з ньютонівської механіки ми б визначили вектор як щось, що має три компоненти. Крім того, ми вимагаємо, щоб він певним чином трансформувався під обертанням. Наприклад, ми могли б сформувати колекцію цифр\((e,\: T,\: DJIA)\), де\(e\) основний заряд,\(T\) це температура в Буффало, Нью-Йорк, і\(DJIA\) вимірює, як працює фондовий ринок. Але це не було б вектором, оскільки він не діє правильно при обертанні (цей конкретний «вектор» є інваріантним під обертаннями). Малюнок\(\PageIndex{1}\) дає менш дурний неприклад. На противагу вектору скаляр задається єдиним дійсним числом і є інваріантним при обертаннях.

Найосновнішим прикладом вектора Ньютона було зміщення\((∆x, ∆y, ∆z)\), і з вектора зміщення ми перейдемо до побудови інших величин, таких як вектор швидкості\(v = ∆r/∆t\). Це спрацювало тому, що в ньютонівській механіці\(∆t\) розглядалося як скаляр, а поділ вектора на скаляр виробляє щось, що знову перетворюється правильним чином на вектор.
Тепер перейдемо до відносності, і пропрацюємо ті ж кроки за аналогією. Коли я кажу «вектор» в цій книзі, я маю на увазі щось, що в\(3+1\) розмірах має чотири складові. Це також можна віднести до чотиривекторних. Нашим єдиним прикладом до цих пір був вектор переміщення простору та часу\(∆r = (∆t, ∆x, ∆y, ∆z)\). Цей вектор перетворюється відповідно до перетворення Лоренца. Загалом, ми вимагаємо, як частина визначення (чотирьох-) вектора, щоб він трансформувався звичайним чином як під обертаннями, так і при прискореннях (перетвореннях Лоренца). Тепер ми можемо уявити, що наступним кроком має бути побудова швидкості чотири вектора\(∆r/∆t\). Але релятивістично, кількість не трансформувалася\(∆r/∆t\) б як вектор, наприклад, якби\(r\) була космічна, то там був би кадр, в якому ми мали\(∆t = 0\), а потім був\(∆r/∆t\) би кінцевим у деяких кадрах, але нескінченним в інших, що абсурдно.
Щоб побудувати дійсний вектор, ми повинні розділити\(∆r\) на скаляр. Єдиним скаляром, який може бути актуальним, буде належний час\(\Delta \tau\), і саме так вектор швидкості визначається в теорії відносності. Для інерційної світової лінії (однієї з постійною швидкістю) ми визначаємо\(v = ∆r/∆\tau\). Узагальнення до неінерційних світових ліній вимагає, щоб ми зробили це визначення в похідну:
\[v = \dfrac{dr}{d\tau}\]
Не всі об'єкти мають чітко визначені вектори швидкостей. Наприклад, розглянемо промінь світла з прямою світовою лінією, щоб похідна була такою\(d. . . / d. . . \) ж, як і відношення скінченних різниць\(∆ . . . /∆ . . .\), тобто обчислення не потрібне. Промінь світла має\(v = c\), так що застосування метрики до будь-якого сегмента його світової лінії дає\(∆\tau = 0\). Спроба обчислити\(v = ∆r/∆\tau \) потім дає щось з нескінченними компонентами. У розділі 4.3 ми побачимо, що всі безмасові частинки, а не лише фотони\(c\), подорожують, тому те саме стосується і них. Тому вектор швидкості визначається лише для частинок, чиї світові лінії схожі на час, тобто масивні частинки.
Приклад\(\PageIndex{1}\): Velocity vector of an object at rest
Об'єкт в стані спокою має\(v = (1, 0)\). Перший компонент вказує на те, що якщо ми прикріпимо годинник до об'єкта за допомогою клейкої стрічки, належний час, виміряний годинником, не зазнає часового розширення за даними спостерігача в цьому кадрі\(dt/ d\tau = 1\). Другий компонент повідомляє нам, що позиція об'єкта не змінюється,\[dx/ dτ = 0\]
Вектор прискорення
Вектор прискорення визначається як похідна вектора швидкості по відношенню до належного часу,
\[a = dv /d\tau.\]
Він вимірює кривизну світової лінії. Його квадратна величина - це мінус квадрат правильного прискорення, що означає прискорення, яке буде вимірюватися акселерометром, проведеним уздовж цієї світової лінії. Власне прискорення лише приблизно дорівнює величині тривекторного ньютонівського прискорення, в межі малих швидкостей.
Приклад\(\PageIndex{2}\): Constant proper acceleration
Припустимо, космічний корабель рухається так, що прискорення оцінюється як постійне значення a спостерігачем на борту. Знайдіть рух\(x(t)\), виміряний спостерігачем в інерційній рамці.
Рішення
Нехай\(τ\) стояти за належний час корабля, і нехай крапки вказують на похідні по відношенню до\(τ\). Швидкість корабля має величину\(1\), тому
\[\dot{t}^2 - \dot{x}^2 = 1 \nonumber\]
Спостерігач, який миттєво перебуває у стані спокою щодо суддів корабля, повинен мати вектор прискорення\((0, a)\) (оскільки застосовується межа низьких швидкостей). Спостерігач в\((t, x)\) кадрі погоджується про величину цього вектора, так
\[\ddot{t}^2 - \ddot{x}^2 = -a^2 \nonumber\]
Розв'язок цих диференціальних рівнянь
\[t = \dfrac{1}{a} \sinh aτ \nonumber\]
і
\[x = \dfrac{1}{a} \cosh aτ \nonumber\]
(Вибір констант інтеграції так, щоб вирази набули найпростіших форм). Усунення\(τ\) дає
\[x = \frac{1}{a}\sqrt{1 + a^2 t^2} \nonumber\]
показано на малюнку\(\PageIndex{2}\). Світова лінія - це гіпербола, і цей тип руху іноді називають гіперболічним рухом.
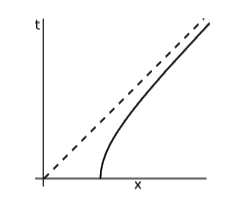
Як\(t\) наближається нескінченність,\(dx/dt\) наближається до швидкості світла. У тій же межі експоненціально\(x\) збільшується з належним часом, так що дивно великі відстані теоретично можна подорожувати протягом життя людини.
Ще однією цікавою особливістю цієї задачі є асимптота штрихової лінії, яка є світлоподібною. Припустимо, ми інтерпретуємо це як світову лінію променя світла. Промінь наближається все ближче і ближче до корабля, але ніколи зовсім не наздожене. Таким чином за умови, що ракета ніколи не припиняє прискорюватися, вся область просторучасу зліва від пунктирної лінії назавжди прихована від своїх пасажирів. Тобто спостерігач, який зазнає постійного прискорення, має горизонт подій — межу, яка заважає їй спостерігати що-небудь з іншого боку. Можливо, ви чули про горизонт подій, пов'язаний з чорною дірою. Цей приклад показує, що ми можемо мати горизонти подій навіть тоді, коли гравітації взагалі немає.
Обмеження на вектори швидкості та прискорення
Підрахунок ступенів свободи
Існує щось оманливе щодо вищевикладеної обробки векторів швидкості та прискорення, і найпростіший спосіб побачити це - ввести ідею ступеня свободи. Часто ми можемо описати систему, використовуючи список дійсних чисел. Для стрілки на годиннику нам знадобиться лише одне число, наприклад,\(3\) годину. Це пояснюється тим, що рука обмежена залишатися в площині обличчя годинника, а також тримати хвіст у центрі кола. Оскільки одне число описує свою позицію, ми говоримо, що воно має одну ступінь свободи. Якщо мандрівний хоче знати, де вона знаходиться на карті, вона має два ступені свободи, які можна вказати як її широту і довготу. Якби вона була в вертольоті, не було б ніяких обмежень залишатися на земній поверхні, а кількість ступенів свободи збільшилося б до трьох. Якби ми також вважали швидкість вертольота частиною опису його стану, то загалом було б шість ступенів свободи: по одній для кожної координати і по одній для кожної складової вектора швидкості.
Тепер припустимо, що ми хочемо вказати швидкість і прискорення частинки. У ньютонівській механіці ми б описали ці три вектори як мають загалом шість ступенів свободи:\(vx, vy, vz, ax, ay\), і\(az\). Перехід від ньютонівської механіки до відносності не може змінити кількість ступенів свободи. Наприклад, прискорення електрона повністю визначається силою, яку ми чинимо на нього, і ми можемо контролювати це прискорення, розміщуючи протон поблизу і виробляючи електричне притягання. Положення протона (три ступені свободи для його трьох координат) визначає прискорення електрона, тому прискорення має рівно три ступені свободи.
Це означає, що має бути деяка прихована надмірність у восьми складових швидкості і прискорення чотирьох векторів. Система має лише шість ступенів свободи, тому повинні бути два обмеження, про які ми не знали. Так само, я пішов в походи і мав мій GPS пристрій стверджують, що я був тисячу футів над озером або три тисячі футів під горою. У тих ситуаціях було обмеження, про яке я знав, але про те, що GPS не зробив: що я був на поверхні землі.
нормалізація швидкості
Перше обмеження виникає природно з геометричної інтерпретації чотиривекторної швидкості, показаної на малюнку\(\PageIndex{3}\). Крива являє собою світову лінію частинки. Штрихову лінію проводять дотичною до світової лінії в певний момент. Під мікроскопом пунктирна лінія, що представляє можливий інерційний рух частинки, не відрізняється від твердої кривої, яка є неінерційною. Пунктирна лінія має нахил\(∆t/∆x = 2\), який відповідає швидкості\(∆x/∆t = 1/2\). Малюнок малюється в\(1 + 1\) розмірах, але в\(3 + 1\) розмірах ми хотіли б дізнатися більше, ніж це число. Ми хотіли б знати орієнтацію пунктирної лінії в трьох просторових вимірах, тобто не тільки швидкість частинки, але і її напрямок руху. Всю потрібну інформацію можна інкапсулювати в вектор. Обидва вектори, показані на малюнку, паралельні пунктирній лінії, тому навіть незважаючи на те, що вони мають різну довжину, різниці між швидкостями, які вони представляють, немає. Оскільки ми хочемо, щоб частинка мала один чітко визначений вектор, щоб представляти її швидкість, ми хочемо вибрати один вектор з усіх векторів, паралельних пунктирній лінії, і назвати це «вектором швидкості».

Ми вже беззаперечно зробили цей вибір. З початкового визначення випливає\(v = dr/ dτ\), що квадратна величина вектора швидкості завжди\(v^2 = v\cdot v\) дорівнює\(1\), хоча об'єкт, рух якого він описує, не рухається зі швидкістю світла. Це, поряд з вимогою, щоб вектор швидкості лежав у майбутньому, а не в минулому світловому конусі, однозначно визначає, який тангенс вектор ми хочемо. Вимога\(v^2 = 1\) є прикладом повторюваної ідеї у фізиці та математиці під назвою нормалізація. Ідея полягає в тому, що у нас є якийсь об'єкт (вектор, функція,.), який можна масштабувати вгору або вниз на будь-яку суму, але серед усіх можливих масштабів є лише один, який є правильним. Наприклад, гравець може розмістити шанс коня на\(9\) перемогу\(1\), але фізик розділить їх на для\(10\) того, щоб нормалізувати ймовірності до\(0.9\) і\(0.1\), ідея полягає в тому, що загальна ймовірність повинна скласти до\(1\). Наше визначення вектора швидкості має на увазі, що він нормалізований. Таким чином, альтернативним, геометричним визначенням вектора швидкості було б те, що це вектор, який дотичний до світової лінії частинки, спрямований на майбутнє і нормований до\(1\).
Коли ми чуємо щось, що називається «вектором», ми зазвичай приймаємо це твердження, що воно не тільки перетворюється як вектор, але й додає як вектор. Але сума двох векторів швидкості зазвичай не є дійсним вектором швидкості взагалі, оскільки вона не матиме одиничної величини. Ця відсутність адитивності в будь-якому випадку очікувалася б, оскільки швидкості не додають лінійно в відносності (розділ 3.3).
Вправа\(\PageIndex{1}\)
Вектори швидкості повинні мати\(v^2 = 1\). Якщо вектор кваліфікується як дійсний вектор швидкості в якомусь кадрі, чи може він бути недійсним в іншому кадрі?
Приємний спосіб мислення про вектори швидкості полягає в тому, що кожен такий вектор представляє потенційного спостерігача. Тобто вектори швидкостей - це спостерігачі-вектори\(o\) глави 1, але з вимогою нормалізації,\(o^2 = 1\) яку ми не нав'язували раніше. Спостерігач записує власний вектор швидкості як\((1, 0)\), тобто як одиничний вектор у часовому напрямку. Оскільки ми не маємо поняття про додавання одного спостерігача до іншого спостерігача, має сенс, що вектори швидкості не додають релятивістично. Аналогічно не існує значущого способу визначення величини спостерігача, тому має сенс, що величина вектора швидкості не несе корисної інформації і може бути довільно встановлена рівною 1.
Щодо величини, зверніть увагу також, що величина вектора є інваріантною, і тому не було б сенсу уявляти, що величина чотиришвидкісного об'єкта дасть деяке число, яке говорить вам, як швидко рухається об'єкт. Як швидко щодо чого?
Якщо\(u\) і\(v\) є обома спрямованими на майбутнє, правильно нормованими векторами швидкості, а якщо сигнатура така,\(+ - --\) як у цій книзі, то їх внутрішній добуток -\(\gamma = u\cdot v\) гамма-фактор, введений в розділі 1.3, відповідний їх відносній швидкості.
Ортогональність швидкості і прискорення
Тепер для другого з двох обмежень, виведених вище:
Припустимо, спостерігач стверджує, що в певний момент часу частка має\(v = (1, 0)\) і\(a = (3, 0)\). Тобто частка знаходиться в стані спокою\((v_x = 0)\) і\(v_t\) зростає її\(3\) одиницями в секунду. Це неможливо, тому що через нескінченно малий часовий проміжок\(dt\) вийде така швидкість зміни\(v = (1 + 3 dt, 0)\), яка не нормалізується належним чином: її величина зросла від\(1\) до\(1+3 dt\). Спостерігач помиляється. Це не можлива комбінація векторів швидкості та прискорення. Загалом, ми завжди маємо наступне обмеження на вектори швидкості та прискорення:
\[a\cdot v = 0\]
Це аналогічно тривимірній ідеї про те, що при рівномірному круговому русі перпендикулярність швидкості і прискорення трьох-векторів - це те, що змушує вектор швидкості обертатися без зміни своєї величини.