17.13: Демпфірована керована система
- Page ID
- 76353

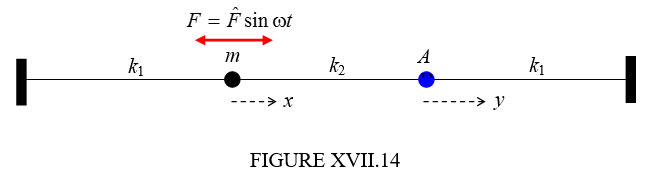
Залишу читача, щоб додати деяке демпфування в систему, описану в розділі 17.12. Давайте тут спробуємо це з системою, описаною в розділі 17.7. Ми будемо застосовувати періодичну силу до маси лівої руки, і ми припустимо, що демпфуюча константа для кожної маси є\( \gamma=\frac{b}{m}\). Ми могли б записати періодичну силу як\( F=\hat{F}\sin\omega t\), але алгебра буде легше, якщо ми запишемо її як\( F=\hat{F}e^{i\omega t}\). Якщо початкова умова така, що\( F=0\) коли\( t=0\), то ми вибираємо саме уявну частину цього в наступних виразах.
Рівняння руху є
\( m\ddot{x}\)= - сила гасіння\( b\dot{x}\)
- натяг пружини в лівій руці\( k_{1}x\)
+ сила\( F\)
+ напруга в середині весни\( k_{2}(y-x)\)
(це останнє тяга кожного разу\( y<x\))
і
\( m\ddot{y}\)- сила демпфування\( b\dot{y}\)
- тяга в правій руці пружини\( k_{1}y\)
- напруга в середині весни\( k_{2}(y-x)\)
Тобто,
\[ m\ddot{x}\ +\ b\dot{x}\ +\ (k_{1}+k_{2})x\ -\ k_{2}y\ =\ \hat{F}e^{i\omega t} \label{17.13.1} \]
і
\[ m\ddot{y}\ +\ b\dot{y}\ +\ (k_{1}+k_{2})y\ -\ k_{2}y\ =\ 0. \label{17.13.2} \]
Для сталого руху шукайте рішення форми
\( \ddot{x}=-\omega^{2}x\),\(\ddot{y}=-\omega^{2} y\), щоб\( \dot{x}=i\omega x\) і\( \dot{y}=i\omega y\).
Рівняння тоді стають
\[ (k_{1}\ +\ k_{2}\ -m\omega^{2}\ +\ ib\omega)x\ -\ k_{2}y\ =\ \hat{F}e^{i\omega t} \label{17.13.3} \]
і
\[ -\ k_{2}x\ +\ (k_{1}\ +\ k_{1}\ -m\omega^{2}\ +\ ib\omega)y\ =\ 0. \label{17.13.4} \]
Зараз потрібно провести невелику алгебру. Розв'яжіть ці рівняння для\( x\) і\( y\), і коли при цьому є комплексне число в знаменнику, помножте верх і низ на сполучений звичайним способом, так щоб отримати\( x\) і\( y\) в формах\( x'\ +\ ix''\) і\( y'\ +\ iy''\). Потім знайдіть вирази для амплітуд\( \hat{x}\) і\( \hat{y}\). Після якоїсь алгебри, кількість якої залежить від своєї майстерності, досвіду і удачі (не завжди очевидно, як зібрати терміни найекономічнішим способом, а вам потрібна якась удача в цьому) ви в підсумку отримаєте, за амплітуди руху
\[ \hat{x}^{2}=\frac{((k_{1}\ +\ k_{2}\ -m\omega^{2})\ +\ b^{2}\omega^{2})\hat{F}^{2}}{((k_{1}-m\omega^{2})^{2}+\ b^{2}\omega^{2})((k_{1}+2k_{2}-m\omega^{2})^{2}+\ b^{2}\omega^{2})} \label{17.13.5} \]
і
\[ \hat{y}^{2}=\frac{k_{2}^{2}\hat{F}^{2}}{((k_{1}-m\omega^{2})^{2}+\ b^{2}\omega^{2})((k_{1}+2k_{2}-m\omega^{2})^{2}+\ b^{2}\omega^{2})}. \label{17.13.6} \]
У цих виразах багато змінних, але для того, щоб якісно побачити, що таке рух стійкого стану, я збираюся поставити\( \hat{F}\),\( m\) і\( k_{1}=1\). Я думаю, якщо я також поставлю\( b=1\), це дасть гасіння світла в сенсі, описаному в главі 11. Що стосується\( k_{2}\), то я збираюся ввести коефіцієнт зчеплення,\( \alpha\) який визначається\( \alpha\ =\ \frac{k_{2}}{k_{1}+k_{2}}\) або\( k_{2}\ =\ \left(\frac{\alpha}{1-\alpha}\right)k_{1}\). Ця постійна муфти буде близька до нуля, якщо середня пружина дуже слабка, і 1, якщо середній роз'єм - жорсткий стрижень. Рівняння тепер стають
\[ \hat{x}^{2}=\frac{((\frac{1}{1-\alpha}\ -\omega^{2})^{2}\ +\ \omega^{2})}{((1-\omega^{2})^{2}+\ \omega^{2})(\frac{1+\alpha}{1-\alpha}-\omega^{2})^{2}+\ \omega^{2})}. \label{17.13.7} \]
і
\[ \hat{y}^{2}=\frac{\frac{\alpha}{(1-\alpha)}}{((1-\omega^{2})^{2}+\ \omega^{2})(\frac{1+\alpha}{1-\alpha}-\omega^{2})^{2}+\ \omega^{2})} \label{17.13.8} \]
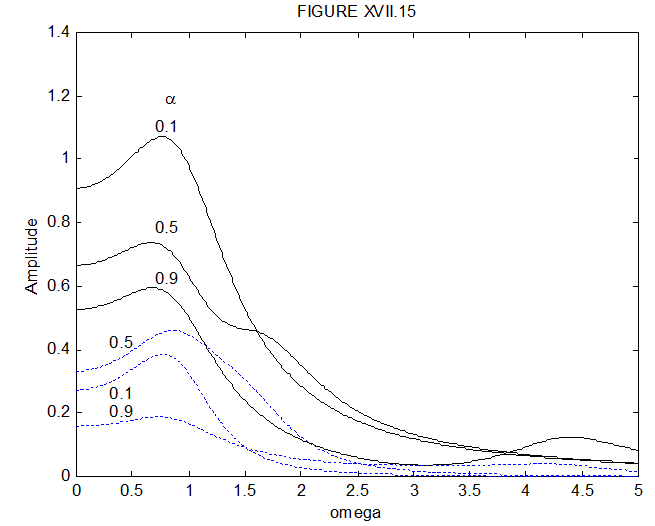
Для ефективності обчислень ви можете трохи переписати ці рівняння. Наприклад, ви могли б написати\( (1-\omega^{2})^{2}\ +\ \omega^{2}\) як\(1\ -\ \Omega(1-\Omega) \), де\( \Omega\ =\ \omega^{2}\). У будь-якому випадку на малюнку XVII.15 показані амплітуди рухів двох мас в залежності від частоти, для\( \alpha\ =\ 0.1,\ 0.5 \) і\( 0.9\). Безперервні чорні криві призначені для маси лівої руки; пунктирна синя крива - для маси правої руки.