17.12: Керована система
- Page ID
- 76320

Ймовірно, було б корисно перед читанням цього та наступного розділу для перегляду глав 11 та 12.
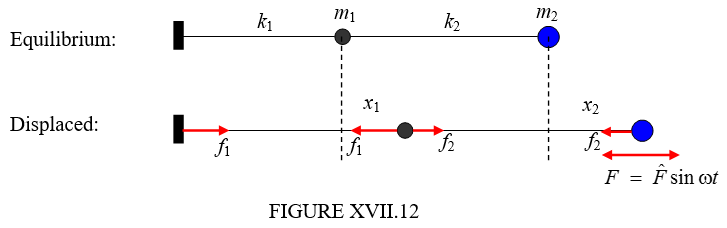
На малюнку XVII.12 показана та ж система, що і на малюнку XVII.2, за винятком того, що замість того, щоб залишитися вібрувати самостійно, друга маса піддається періодичній силі\( F\ =\ \hat{F}\sin\omega t\). На даний момент ми припустимо, що немає демпфування. У будь-якому випадку, це не консервативна сила, і рівняння Лагранжа буде використано у вигляді Рівняння 13.4.12. Як і в розділі 17.2, кінетична енергія дорівнює
\[ T =\frac{1}{2}m_{1}\dot{x}_{1}^{2}\ +\ \frac{1}{2}m_{2}\dot{x}_{2}^{2}\label{17.12.1} \]
Рівняння Лагранжа
\[ \frac{d}{dt}\frac{\partial T}{\partial \dot{x}_{1}}\ -\ \frac{\partial T}{\partial x_{1}}\ =\ P_{1} \label{17.12.2} \]
і
\[ \frac{d}{dt}\frac{\partial T}{\partial \dot{x}_{2}}\ -\ \frac{\partial T}{\partial x_{2}}\ =\ P_{2}. \label{17.12.3} \]
Нам належить виявити узагальнені сили\( P_{1}\) і\( P_{2}\).
У нерівноважному положенні розтягнення пружини лівої руки є\( x_{1}\) і так напруга в цій пружині є\( f_{1}\ =\ k_{1}x_{1}\). Розширення правої пружини є\( x_{2}\ -\ x_{2}\) і так напруга в цій пружині є\( f_{2}\ =\ k_{2}(x_{2}-x_{1})\). \( x_{1}\)\( m_{1}\)Якби збільшити на\( \delta x_{1}\), робота, виконана над тим,\( (f_{2}-f_{1})\delta x_{1}\) і, отже, узагальнена сила, пов'язана з координатою,\( x_{1}\) є\( P_{1}\ =\ k_{2}(x_{2}-x_{1})-k_{1}x_{1}\). \( x_{2}\)\( m_{2}\)Якби збільшити на\( \delta x_{2}\), робота, виконана над тим,\( (F-f_{2})\delta x_{2}\) і, отже, узагальнена сила, пов'язана з координатою,\( x_{2}\) є\( P_{2}=\hat{F}\sin\omega t-k_{2}(x_{2}-x_{1})\). Таким чином, лагранжеві рівняння руху стають
\[ m_{1}\ddot{x}_{1}\ +\ (k_{1}+k_{2})x_{1}\ -k_{2}x_{2}\ =\ 0 \label{17.12.4} \]
і
\[ m_{2}\ddot{x}_{2}\ +\ k_{2}(x_{2}-x_{1})\ =\ \hat{F}\sin\omega t. \label{17.12.5} \]
Шукайте рішення форми\( \ddot{x}_{1}=-\omega^{2}x_{1}\) і\( \ddot{x}_{2}=-\omega^{2}x_{2}\). Рівняння стають
\[ (k_{1}+k_{2}-m_{1}\omega^{2})x_{1}\ -\ k_{2}x_{2}\ =\ 0 \label{17.12.6} \]
і
\[ -k_{2}x_{1}\ +\ (k_{2}\ -\ m_{2}\omega^{2})x_{2}\ =\ \hat{F}\sin\omega t. \label{17.12.7} \]
Ми, звичайно, зараз не прирівнюємо детермінанти коефіцієнтів до нуля (чому б і ні?!) , але ми можемо вирішити ці рівняння, щоб отримати
\[ x_{1}\ =\ \frac{k_{2}\hat{F}\sin\omega t}{(k_{1}+k_{2}-m_{1}\omega^{2})(k_{2}-m_{2}\omega^{2})-k_{2}^{2}} \label{17.12.8} \]
і
\[ x_{2}\ =\ \frac{(k_{1}+k_{2}-m_{1}\omega^{2})\hat{F}\sin\omega t}{(k_{1}+k_{2}-m_{1}\omega^{2})(k_{2}-m_{2}\omega^{2})-k_{2}^{2}}. \label{17.2.9} \]
Амплітуди цих рухів (і як вони змінюються залежно від частоти форсування\( \omega\)) є
\[ \hat{x}_{1}\ =\ \frac{k_{2}\hat{F}}{m_{1}m_{2}\omega^{4}\ -\ (m_{1}k_{2}+m_{2}k_{1}+m_{2}k_{2})\omega^{2}+k_{1}k_{2}} \label{17.12.10} \]
і
\[ \hat{x}_{2}\ =\ \frac{(k_{1}+k_{2}-m_{1}\omega^{2})\hat{F}}{m_{1}m_{2}\omega^{4}\ -\ (m_{1}k_{2}+m_{2}k_{1}+m_{2}k_{2})\omega^{2}+k_{1}k_{2}} \label{17.12.11} \]
де я переписав знаменники у вигляді квадратичного виразу в\( \omega^{2}\).
Для ілюстрації малюю, на малюнку XVII.13, амплітуди руху\( m_{1}\)(continuous curve, in black) and of \( m_{2}\)(dashed curve, in blue) for the following data:
\( \hat{F}=1,\ k_{1}=k_{2}=1,\ m_{1}=3,\ m_{2}=2,\)
коли рівняння стають
\[ \hat{x}_{1}=\frac{1}{6\omega^{4}-7\omega^{2}+1}=\frac{1}{(6\omega^{2}-1)(\omega^{2}-1)} \label{17.12.12} \]
і
\[ \hat{x}_{1}=\frac{2-3\omega^{2}}{6\omega^{4}-7\omega^{2}+1}=\frac{2-3\omega^{2}}{(6\omega^{2}-1)(\omega^{2}-1)} \label{17.12.13} \]
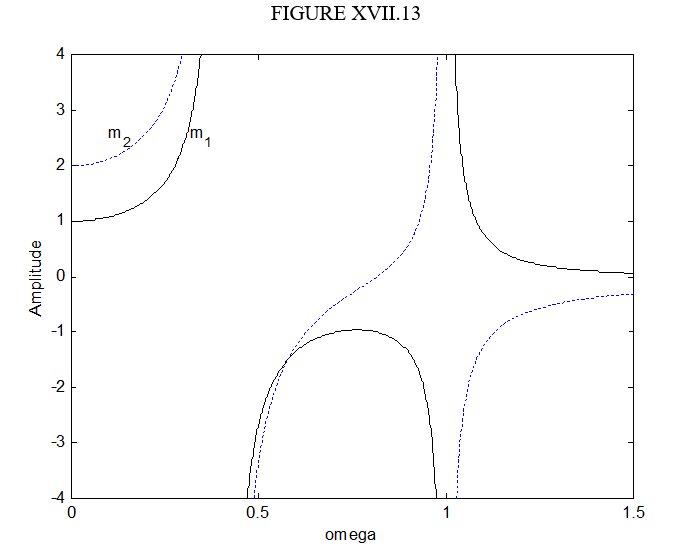
Там, де амплітуда негативна, коливання поза фазою з силою\( F\). Амплітуди йдуть до нескінченності (пам'ятайте, що ми припускаємо тут нульове демпфування) на двох частотах, де знаменники рівнянь\( \ref{17.12.10}\) і\( \ref{17.12.11}\) дорівнюють нулю. Амплітуда руху\( m_{2}\) дорівнює нулю, коли чисельник Рівняння\( \ref{17.12.11}\) дорівнює нулю. Це при кутовій частоті\( \sqrt{\frac{(k_{1}+k_{2})}{m_{1}}}\), яка якраз кутова частота руху\( m_{1}\) утримується двома пружинами між двома нерухомими точками. У нашому числовому прикладі це\( \omega\ =\ \sqrt{\frac{2}{3}}\ =\ 0.8165\). Це приклад антирезонансу.