17.5: Подвійний маятник
- Page ID
- 76309

Це ще одна подібна проблема, хоча замість того, щоб припускати закон Гука, ми припустимо, що кути малі (\( \sin \theta \approx \theta , \cos \theta \approx 1 - \frac{1}{2} \theta^2\)). Для наочності малюнка, однак, я намалював великі кути на малюнку XVIII.4.
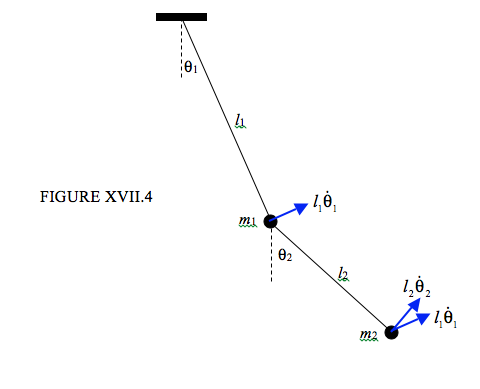
Оскільки я збираюся використовувати лагранжеві рівняння руху, я не відзначив у силах і прискореннях; скоріше, я відзначив у швидкостях. Я сподіваюся, що дві складові швидкості\(m_{2} \), яку я позначив, є зрозумілими; швидкість\(m_{2} \) задається\( v^2_{2} = l^2_{1}\dot{\theta}^2_{1} + l^2_{2}\dot{\theta}^2_{2} + 2 l_{1}l_{2}\dot{\theta}_1 \dot{\theta}_2 \cos(\theta_2- \theta_1) \). Кінетична і потенційна енергія
\ [Т =\ гідророзриву {1} {2} m_1l^2_1\ точка {\ тета} ^2_1 +\ гідророзриву {1} m_1
[l^2_1\ точка {\ тета} ^2_1 + l^2_2\ точка {\ тета} ^2_2 + 2l_1l_2\ точка {\ тета} _1\ точка {\ тета} _2\ cos (\ тета_2 -\ тета_1)],\ етикетка {17.5.1}\]
\[ V = constant - m_1gl_1 \cos \theta_1 - m_2g(l_1\cos \theta_1 + l_2 \cos \theta_2). \label{17.5.2} \]
Якщо ми зараз зробимо малий кут наближення, вони стануть
\[ T = \frac{1}{2} m_1l^2_1 \dot{\theta}^2_1 + \frac{1}{2} m_2(l_1 \dot{\theta}_1 + l_2 \dot{\theta}_2)^2 \label{17.5.3} \]
і
\[ V = contant + \frac{1}{2}m_1gl_1\theta^2_1 + \frac{1}{2}m_1g(l_1\theta^2_1 + l_2\theta^2_2) - m_1gl_1 - m_2gl_2. \label{17.5.4} \]
Застосовуйте рівняння лагранжа по черзі до\( \theta_1\) і\( \theta_2\):
\[ (m_1 + m_2)l^2_1\ddot{\theta}_1 + m_2l_1l_2\ddot{\theta} = -(m_1 + m_2)gl_1 \theta_1 \label{17.5.5} \]
і
\[ m_2l_1l_2 \ddot{\theta}_1 + m_2l^2_2 \ddot{\theta}_2 = -m_2gl_2\theta_2. \label{17.5.6} \]
Шукайте рішення у вигляді\( \dot{\theta}_1 = - \omega \theta_1 \) і\( \dot{\theta}_2 = - \omega^2 \theta_2 \).
Тоді
\[ (m_1 + m_2)(l_2 \omega^2 -g)\theta_1 + m_2l_1l_2 \omega^2 \theta_2 = 0 \label{17.5.7} \]
і
\[ l_1 \omega^2\theta_1 + (l_2\omega^2 - g)\theta_2 =0. \label{17.5.8} \]
Будь-який з них дає коефіцієнт зміщення\( \theta_2/\theta_1 \). Прирівнявши два вирази для співвідношення\( \theta_2/\theta_1 \), або поставивши детермінант коефіцієнтів до нуля, дає наступне рівняння для частот нормальних режимів:
\[ m_1l_1l_2\omega^4 - (m_1+m_2)g(l_1+l_2)\omega^2 + (m_1+m_2)g^2 = 0. \label{17.5.9} \]
Як і в попередніх прикладах, є повільний режим в фазі, і швидкий позафазовий режим.
Наприклад, припустимо\(m_1\) = 0,01 кг,\(m_2\) = 0,02 кг,\(l_1 \) = 0,3 м,\(l_2\) = 0,6 м,\(g\) = 9,8 м с −2.
Потім\( 0.0018\omega^4 - 0.02446\omega^2 = 0\). Повільний\( \omega \) розв'язок = 3,441 рад с −1 (\( P \)= 1,826 с), а швидкий розв'язок\(\omega \) = 11,626 рад с −1 (\(P\)=0,540 с). Якщо поставити перше з них (повільне рішення) в будь-якому з рівнянь 17.5.7 або 8 (або обидва, як перевірка на помилки), ми отримаємо коефіцієнт зміщення\( \theta_2 / \theta_1 \) = 1.319, що є режимом фази. Якщо поставити друге (швидке рішення) в будь-якому рівнянні, то отримаємо\( \theta_2 / \theta_1 \) = −0,5689, що є позафазовим режимом. Якби ви почали з\( \theta_2 / \theta_1 \) = 1.319 і відпустили, маятник розгойдувався б у повільному режимі у фазі. Якби ви починали з\( \theta_2 / \theta_1 \) = −0.5689 і відпустили, маятник буде коливатися у швидкому позафазовому режимі. В іншому випадку рух буде лінійною комбінацією нормальних режимів, причому частка кожного визначається початковими умовами, як у прикладі в розділі 17.3.