17,4: Подвійний торсіонний маятник
- Page ID
- 76332

Тут ми маємо два циліндри обертальної інерції\(I_{1}\) і\(I_{2} \) звисають з двох проводів констант кручення\( c_{1}\) і\( c_{2} \).
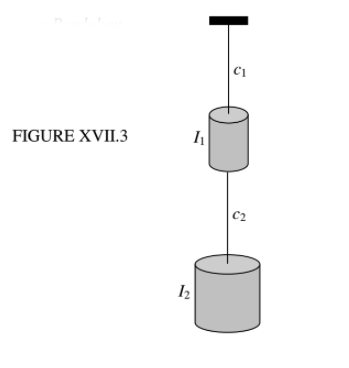
У будь-який момент верхній циліндр повертається на кут\( \theta_{1} \) з положення рівноваги, а нижній - на кут\( \theta_{2} \) з положення рівноваги (так, щоб щодо верхнього циліндра він був розвернутий). Рівняння і опис руху точно такі ж, як і в попередньому прикладі, за винятком того, що\( x_{1}, x_{2}, m_{1}, m_{2}, k_{1}, k_{2} \) замінені на\( \theta_{1}, \theta_{2}, I_{1}, I_{2}, c_{1}, c_{2} \). Кінетична і потенційна енергії є
\[ T = \frac{1}{2}I_{1}\dot{\theta}_{1}^{2}+ \frac{1}{2}I_{2}\dot{\theta}_{2}^{2}, \label{17.4.1} \]
\[ T = \frac{1}{2}c_{1}{\theta}_{1}^{2}+ \frac{1}{2}c_{2}({\theta}_{2}-{\theta}_{1}) ^{2}. \label{17.4.2} \]
Рівняння для\( \omega \) і коефіцієнтів зміщення якраз однакові, і існує позафазний і позафазовий режим.