1.9: Матриці перетворення
- Page ID
- 17548

Матриці можуть бути використані для відображення одного набору координат або функцій на інший набір. Матриці, що використовуються для цієї мети, називаються матрицями перетворення. У теорії груп ми можемо використовувати матриці перетворення для виконання різних операцій симетрії, розглянутих на початку курсу. Як простий приклад, ми дослідимо матриці, які ми використовували б для виконання деяких з цих операцій симетрії над вектором\(\begin{pmatrix} x, y \end{pmatrix}\).
Операція ідентичності
Операція ідентичності залишає вектор без змін, і, як ви вже можете підозрювати, відповідною матрицею є матриця ідентичності.
\[\begin{pmatrix} x, y \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & 1 \end{pmatrix} = \begin{pmatrix} x, y \end{pmatrix} \label{9.1}\]
Відображення в площині
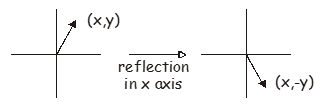
Найпростіший приклад матриці відображення відповідає відображенню вектора\(\begin{pmatrix} x, y \end{pmatrix}\) in either the \(x\) or \(y\) axes. Reflection in the \(x\) axis maps \(y\) to \(-y\), while reflection in the \(y\) axis maps \(x\) to \(-x\). The appropriate matrix is very like the identity matrix but with a change in sign for the appropriate element. Reflection in the \(x\) axis transforms the vector \(\begin{pmatrix} x, y \end{pmatrix}\) to \(\begin{pmatrix} x, -y \end{pmatrix}\), and the appropriate matrix is
\[\begin{pmatrix} x, y \end{pmatrix} \begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} = \begin{pmatrix} x, -y \end{pmatrix} \label{9.2}\]
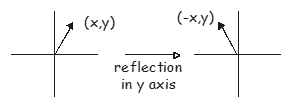
Відображення по осі y перетворює вектор\(\begin{pmatrix} x, y \end{pmatrix}\) to \(\begin{pmatrix} -x, y \end{pmatrix}\), and the appropriate matrix is
\[\begin{pmatrix} x, y \end{pmatrix} \begin{pmatrix} -1 & 0 \\ 0 & 1 \end{pmatrix} = \begin{pmatrix} -x, y \end{pmatrix} \label{9.3}\]
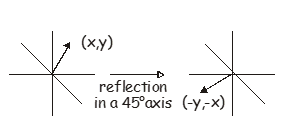
Більш загально матриці можуть використовуватися для представлення відображень у будь-якій площині (або лінії в 2D). Наприклад, відображення по осі 45°, показане під картами
\(\begin{pmatrix} x, y \end{pmatrix}\) onto \(\begin{pmatrix} -y, -x \end{pmatrix}\).
\[\begin{pmatrix} x, y \end{pmatrix} \begin{pmatrix} 0 & -1 \\ -1 & 0 \end{pmatrix} = \begin{pmatrix} -y, -x \end{pmatrix} \label{9.4}\]
Обертання навколо осі
У двох вимірах відповідна матриця для представлення повороту на кут\(\theta\) щодо початку
\[R(\theta) = \begin{pmatrix} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{pmatrix} \label{9.5}\]
У трьох вимірах обертання про\(x\), \(y\) and \(z\) axes acting on a vector \(\begin{pmatrix} x, y, z \end{pmatrix}\) are represented by the following matrices.
\[R_{x}(\theta) = \begin{pmatrix} 1 & 0 & 0 \\ 0 & \cos\theta & -\sin\theta \\ 0 & \sin\theta & \cos\theta \end{pmatrix} \label{9.6a}\]
\[R_{y}(\theta) = \begin{pmatrix} \cos\theta & 0 & -\sin\theta \\ 0 & 1 & 0 \\ \sin\theta & 0 & \cos\theta \end{pmatrix} \label{9.6b}\]
\[R_{z}(\theta) = \begin{pmatrix} \cos\theta & -\sin\theta & 0 \\ \sin\theta & \cos\theta & 0 \\ 0 & 0 & 1 \end{pmatrix} \label{9.6c}\]