4.2: Супутні тарифи
- Page ID
- 60678

Коли дві величини пов'язані рівнянням, знаючи значення однієї величини можна визначити значення іншої. Наприклад, окружність і радіус кола пов'язані між собою\(C=2\pi r\); знаючи, що\(C = 6\pi\) в визначає радіус повинен бути 3 дюйма.
Тема пов'язаних ставок робить цей крок далі: знаючи швидкість, з якою змінюється одна кількість, може визначити швидкість, з якою змінюється інша.
Примітка. Цей розділ значною мірою спирається на неявну диференціацію, тому повернення до розділу 2.6 може допомогти. Ми демонструємо поняття пов'язаних ставок на прикладах.
Приклад\(\PageIndex{1}\): Understanding related rates
Радіус кола зростає зі швидкістю 5 в/год. З якою швидкістю зростає окружність?
Рішення
Окружність і радіус кола пов'язані між собою\(C = 2\pi r\). Нам дають інформацію про те, яка тривалість\(r\) змін щодо часу; тобто нам говорять\(\frac{dr}{dt} = 5\) в/ч. Ми хочемо знати, як тривалість\(C\) змін щодо часу, тобто ми хочемо знати\(\frac{dC}{dt}\).
Неявно диференціювати обидві сторони щодо\(t\):\(C = 2\pi r\)
\ [\ почати {вирівнювати*} C &= 2\ пі r\\\ розриву {d} {dt}\ великий (C\ великий) &=\ розриву {d} {dt}\ великий (2\ пі р\ великий)\\\ розрив {dC} {dt} &= 2\ pi\ frac {dt} {dt} {dt}.
\ end {вирівнювати*}\]
Як ми знаємо\(\frac{dr}{dt} = 5\) в/год, ми знаємо
$\ розрив {dC} {dT} = 2\ пі 5 = 10\ пі\ приблизно 31,4\ текст {в/год.}\]
Розглянемо інший, схожий приклад.
Приклад\(\PageIndex{2}\): Finding related rates
Вода витікає з крана зі швидкістю\(^3\) в/с на рівну поверхню з постійною швидкістю, утворюючи кругову калюжу, яка знаходиться\(1/8\) в глибині.\(2\)
- З якою швидкістю зростає площа калюжі?
- З якою швидкістю зростає радіус кола?
Рішення
1. Відповісти на це питання можна двома способами: використовуючи «здоровий глузд» або пов'язані з ними тарифи. Метод здорового глузду стверджує, що обсяг калюжі зростає\(2\) на\(^3\) в/с, де
\[\text{volume of puddle}\, =\, \text{area of circle} \times \text{depth}.\]
Оскільки глибина постійна\(1/8\) в, площа повинна зростати на 16in\(^2\) /с.
Цей підхід розкриває базовий принцип споріднених ставок. \(V\)\(A\)Дозволяти і представляти обсяг і площа калюжі. Ми знаємо\(V= A\times \frac18\). Візьміть похідну обох сторін щодо\(t\), використовуючи неявну диференціацію.
\[\begin{align} V &= \frac18A\\ \frac{d}{dt}\big(V\big) &= \frac{d}{dt}\left(\frac18A\right)\\ \frac{dV}{dt} &= \frac18\frac{dA}{dt} \end{align}\]
Як\(\frac{dV}{dt} = 2\), ми знаємо\(2 = \frac18\frac{dA}{dt}\), а значить\(\frac{dA}{dt} = 16\). Таким чином, площа зростає на 16в\(^2\) /с.
2. Для початку нам потрібно рівняння, яке пов'язує те, що ми знаємо, з радіусом. Ми щойно дізналися щось про площу поверхні кругової калюжі, і ми знаємо\(A = \pi r^2\). Ми повинні мати можливість дізнатися про швидкість, з якою радіус зростає за допомогою цієї інформації.
Неявно вивести обидві сторони щодо\(t\):\(A=\pi r^2\)
\[\begin{align} A &= \pi r^2 \\ \frac{d}{dt}\big(A\big) &= \frac{d}{dt}\big(\pi r^2\big)\\ \frac{dA}{dt} &= 2\pi r\frac{dr}{dt} \end{align}\]
Наша робота вище розповіла нам, що\(\frac{dA}{dt} = 16\text{in}^2\) /s. рішення для\(\frac{dr}{dt}\), у нас є
$\ frac {dr} {dt} =\ frac {8} {\ pi r}.\]
Зверніть увагу, як наша відповідь не є числом, а скоріше функцією\(r\). Іншими словами, швидкість, з якою радіус зростає, залежить від того, наскільки велике коло вже є. Якщо коло дуже велике, додавання 2в\(^3\) води зовсім не зробить коло набагато більше. Якщо коло розміром з копійки, додавання такої ж кількості води призведе до радикальної зміни радіуса кола.
У чомусь наша проблема була (навмисно) погано поставлена. Нам потрібно вказати радіус струму, щоб знати швидкість зміни. Коли калюжа має радіус 10in, радіус зростає зі швидкістю
$\ розрив {dr} {dt} =\ frac {8} {10\ pi} =\ frac {4} {5\ pi}\ приблизно 0,25\ текст {в/с}.\]
Приклад\(\PageIndex{3}\): Studying related rates
Радіолокаційні гармати вимірюють швидкість зміни відстані між гарматою і об'єктом, який вона вимірює. Наприклад, читання «55 миль/год» означає, що об'єкт віддаляється від пістолета зі швидкістю 55 миль на годину, тоді як вимірювання «\(-25\)миль/год» означало б, що об'єкт наближається до пістолета зі швидкістю 25 миль на годину.
Якщо радіолокаційна гармата рухається (скажімо, прикріплена до поліцейської машини), то радіолокаційні показання зрозумілі лише відразу, якщо пістолет і об'єкт рухаються по одній лінії. Якщо поліцейський подорожує 60 миль/год і отримує показання 15mph, він знає, що автомобіль попереду нього рухається зі швидкістю 15 миль на годину, тобто автомобіль їде 75 км/год. (Цей принцип прямої лінії є однією з причин, чому офіцери паркуються на узбіччі шосе і намагаються стріляти прямо вниз по дорозі. Це дає найбільш точне читання.)
Припустимо, офіцер їде через північ зі швидкістю 30 миль/год і бачить автомобіль, що рухається на схід, як показано на малюнку\(\PageIndex{1}\). Використовуючи свій радіолокаційний пістолет, він вимірює показання 20 миль/год. Використовуючи орієнтири, він вважає, що і він, і інший автомобіль знаходяться приблизно в 1/2 милі від перетину їх двох доріг.
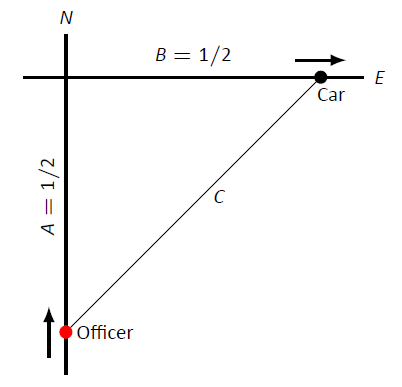
Малюнок\(\PageIndex{1}\): Ескіз поліцейської машини (внизу), яка намагається виміряти швидкість автомобіля (праворуч) у прикладі\(\PageIndex{3}\).
Якщо обмеження швидкості на іншій дорозі становить 55 км/год, чи інший водій перевищує швидкість?
Рішення
Використовуючи діаграму на малюнку\(\PageIndex{1}\), давайте позначимо те, що нам відомо про ситуацію. Оскільки і поліцейський, і інший водій знаходяться в 1/2 милі від перехрестя\(A = 1/2\)\(B = 1/2\), ми маємо, і через теорему Піфагора,\(C = 1/\sqrt{2}\approx 0.707\).
Ми знаємо, що поліцейський їде зі швидкістю 30 миль/год; тобто\(\frac{dA}{dt} = -30\). Причиною цього темпу змін є негативним,\(A\) є те, що стає менше; відстань між офіцером і перехрестям скорочується. Радіолокаційне вимірювання є\(\frac{dC}{dt} = 20\). Ми хочемо знайти\(\frac{dB}{dt}\).
Нам потрібно рівняння, яке відноситься\(B\) до\(A\) і/або\(C\). Теорема Піфагора - хороший вибір:\(A^2+B^2 = C^2\). Диференціювати обидві сторони щодо\(t\):
\[\begin{align} A^2 + B^2 &= C^2 \\ \frac{d}{dt}\left(A^2+B^2\right) &= \frac{d}{dt}\left(C^2\right) \\ 2A\frac{dA}{dt} + 2B\frac{dB}{dt} &= 2C\frac{dC}{dt} \end{align} \]
У нас є цінності для всього, крім\(\frac{dB}{dt}\). Рішення для цього у нас є
$\ розрив {дБ} {dT} =\ гідророзриву {C\ frac {dC} {dT} - A\ frac {dT} {dt}} {B}\ приблизно 58.28\ текст {mph}.\]
Інший водій, здається, трохи перевищує швидкість.
Примітка: Приклад\(\PageIndex{3}\) є одночасно цікавим і непрактичним. Він підкреслює складність використання радара нелінійним способом і пояснює, чому «в реальному житті» поліцейський слідував за іншим водієм, щоб визначити свою швидкість, а не витягувати олівець і папір.
Принципи тут важливі, хоча. Багато автоматизовані транспортні засоби роблять судження про інші рухомі об'єкти на основі сприйнятих відстаней, радіолокаційних вимірювань та концепцій пов'язаних ставок.
Приклад\(\PageIndex{4}\): Studying related rates
Камера розміщена на штативі 10 футів від узбіччя дороги. Камера повинна повернути, щоб відстежувати автомобіль, який повинен проїхати зі швидкістю 100 км/год для рекламного відео. Планувальники відео хочуть знати, яким двигуном повинен бути оснащений штатив, щоб правильно відстежувати автомобіль, коли він проходить повз. На малюнку\(\PageIndex{2}\) показана запропонована настройка.
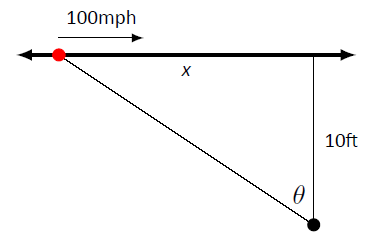
Малюнок\(\PageIndex{2}\): Відстеження автомобіля, що перевищує швидкість (зліва) з обертається камерою.
Як швидко камера повинна бути в змозі повернути, щоб відстежувати автомобіль?
Рішення
Ми шукаємо інформацію про те, наскільки швидко камера повертається; отже, нам потрібно рівняння, яке буде\(\theta\) співвідносити кут до положення камери та швидкості та положення автомобіля.
Малюнок\(\PageIndex{2}\) пропонує використовувати тригонометричне рівняння. Дозволяючи\(x\) представляти відстань автомобіля від точки на дорозі безпосередньо перед камерою, ми маємо
\[ \tan \theta = \frac{x}{10}\]
Оскільки автомобіль рухається зі швидкістю 100 км/год, у нас є\(\frac{dx}{dt} = -100\) миль/год (як в останньому прикладі,\(x\) оскільки стає менше, коли автомобіль подорожує,\(\frac{dx}{dt}\) є негативним). Нам потрібно перетворити вимірювання, щоб вони використовували однакові одиниці; перепишіть -100mph з точки зору ft/s:
$\ розрив {dx} {dt} = -100\ розрив {\ текст {м}} {\ текст {hr}} = -100\ розрив {\ текст {м}} {\ текст {hr}}\ cdot5280\ frac {\ текст {ft}} {\ текст {м}}\ cdot\ frac {1} {3600} hr}} {\ текст {s}} =-146. \ оверлайн {6}\ текст {ft/s}.\]
Тепер візьмемо похідну обох сторін рівняння,\(\PageIndex{9}\) використовуючи неявну диференціацію:
\[\begin{align} \tan \theta &= \frac{x}{10} \\ \frac{d}{dt}\big(\tan \theta\big) &= \frac{d}{dt}\left(\frac{x}{10}\right) \\ \sec^2\theta\,\frac{d\theta}{dt} &= \frac{1}{10}\frac{dx}{dt}\\ \frac{d\theta}{dt} &= \frac{\cos^2\theta}{10}\frac{dx}{dt} \end{align}\]
Ми хочемо знати, що найшвидше камера повинна повернути. Здоровий глузд говорить нам, що це коли автомобіль знаходиться безпосередньо перед камерою (тобто коли\(\theta = 0\)). Наша математика несе це. У Рівнянні\(\PageIndex{14}\) ми бачимо,\(\cos^2\theta\) що це коли найбільший; це коли\(\cos \theta = 1\) чи коли\(\theta = 0\).
З\(\frac{dx}{dt} \approx -146.67\) ft/s ми маємо
$\ frac {d\ тета} {dt} = -\ frac {1\ текст {rad}} {10\ текст {ft}} 146.67\ текст {ft/s} = -14.667\ текст {радіан/с}.\]
Ми знаходимо, що\(\frac{d\theta}{dt}\) є негативним; це відповідає нашій діаграмі\(\PageIndex{2}\) на малюнку для\(\theta\) стає менше, коли автомобіль наближається до камери.
Яке практичне значення\(-14.667\) радіанів/с? Нагадаємо, що 1 круговий оборот йде через\(2\pi\) радіани, таким чином\(14.667\) rad/s означає\(14.667/(2\pi)\approx 2.33\) обороти в секунду. Негативний знак вказує на те, що камера обертається за годинниковою стрілкою.
Введено похідну як функцію, яка дає нахили дотичних ліній функцій. У цій главі підкреслюється використання похідної іншими способами. Метод Ньютона використовує похідну для наближення коренів функцій; цей розділ підкреслює аспект «швидкості зміни» похідної, щоб знайти зв'язок між швидкостями зміни двох пов'язаних величин. У наступному розділі ми використовуємо поняття Extreme Value для оптимізації величин.