5.4: Вільні кінці
- Page ID
- 79252

Розберемо приклад вимушеного коливання з іншим видом граничної умови. Розглянемо поперечні коливання бісерної нитки. Для визначеності візьмемо чотири намистини, щоб це була система з чотирьох спарених осциляторів. Однак замість того, щоб сполучати струни на кінцях з нерухомими стінками, ми будемо прикріплювати їх до безмасовим кільцям, які вільно ковзають в поперечному напрямку на нефрикційних стрижнях. Потім, як кажуть, струна має вільні кінці (принаймні для поперечного руху). Тоді система виглядає як діаграма на малюнку\( 5.11\), де осцилятори рухаються вгору і вниз в площині паперу: Давайте знайдемо її нормальні режими.

Малюнок 5.11: Рядок з бісеру з вільними кінцями.
Звичайні режими для вільних кінців
 5-3
5-3
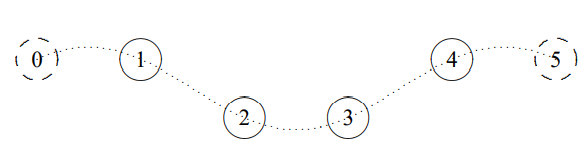
Як і раніше, ми уявляємо, що це частина нескінченної системи бісеру з космічною інваріантністю перекладу. Це показано на малюнку\( 5.12\). Тут безмасові кільця, що ковзають на стрижнях без тертя, були замінені уявними (пунктирними) намистинами, 0 і 5. Співвідношення дисперсії таке ж, як і для будь-якої іншої нескінченної бісерної нитки, (5.39). Питання в тому, яка гранична умова на нескінченній системі відповідає фізичній граничній умові, що кінцеві кульки вільні з одного боку? Відповідь полягає в тому, що ми повинні мати першу уявну намистину з обох боків рухатися вгору і вниз з останньою справжньою намистиною, так що муфта з бісеру 0 горизонтальна і не чинить поперечної відновлювальної сили на намистину 1, а муфта струна з бісеру 5 горизонтальна і не чинить поперечної відновлювальної сили на намистина 4:\[A_{0}=A_{1} ,\]
\[A_{4}=A_{5} ;\]

Малюнок\( 5.12\): Задоволення граничних умов у скінченній системі.
Ми будемо працювати в позначеннях, в яких намистини маркуються їх положеннями рівноваги. Нормальні режими нескінченної системи тоді\(e^{\pm i k x}\). Але нам ще не довелося вирішувати, куди ми поставимо походження. Як сформувати лінійну комбінацію складних експоненціальних режимів\(e^{\pm i k x}\), і\(k\) вибрати відповідність цій граничній умові? Почнемо з (5.42). Ми можемо записати лінійну комбінацію, якою б вона не була, у вигляді\[\cos (k x-\theta) .\]
Будь-яка дійсна лінійна комбінація\(e^{\pm i k x}\) може бути записана таким чином до загальної мультиплікативної константи (див. (1.96)). Тепер, якщо\[\cos \left(k x_{0}-\theta\right)=\cos \left(k x_{1}-\theta\right) ,\]
де\(x_{j}\) - положення\(j\) го блоку, то або
- \(\cos (k x-\theta)\)має максимум або мінімум при\(\frac{x_{0}+x_{1}}{2}\), або
- \(k x_{1}-k x_{0}\)є кратним\(2 \pi\).
Розглянемо випадок 1. Ми побачимо, що випадок 2 не дає ніяких додаткових режимів. Ми\(\frac{x_{0}+x_{1}}{2}\) виберемо наші координати так, щоб точка, посередині між\(x_{0}\) і\(x_{1}\), була\(x = 0\). Ми не дбаємо про загальну нормалізацію, тому якщо функція має мінімум, ми помножимо її на −1, щоб зробити її максимальною. Таким чином, у випадку 1 функція\(\cos (k x-\theta)\) має максимум at\(x = 0\), що означає, що ми можемо взяти\(\theta = 0\). Таким чином, функція просто\(\cos kx\). Система з таким маркуванням показана на рис\( 5.13\). Зсув\(j\) намиста тоді\[A_{j}=\cos [k a(j-1 / 2)] .\]

Малюнок\( 5.13\): Та ж система осциляторів позначена більш спритно.
Тепер повинно бути зрозуміло, як накладати граничну умову (5.43) на іншому кінці. Ми хочемо мати максимальну або мінімальну середину між намистиною 4 та намистиною 5, в\(x = 4a\). Ми отримуємо максимум або мінімум кожного разу, коли аргумент косинуса є цілим кратним\(\pi\). Аргумент косинуса при\(x = 4a\) є\(4ka\), де\(k\) - кутове хвильове число. Таким чином, гранична умова буде задоволена, якщо режим має\(4ka = n \pi\) для цілого числа\(n\). Тоді\[\cos [k a(4-1 / 2)]=\cos [k a(5-1 / 2)] \Rightarrow k a=\frac{n \pi}{4} .\]
Таким чином, режими\[A_{j}=\cos [k a(j-1 / 2)] \text { with } k=\frac{n \pi}{4 a} \text { for } n=0 \text { to } 3 .\]
Бо\(n > 3\), режими просто повторюються, тому що\(k \geq \pi / a\).
У (5.48),\(n = 0\) це тривіальний режим, в якому всі намистини рухаються вгору-вниз разом. Це можливо тому, що немає відновлювальної сили взагалі, коли всі намистини рухаються разом. Як обговорювалося вище (див. (5.40)), кульки можуть рухатися з постійною швидкістю, тому що\(\omega = 0\) для цього режиму. Зверніть увагу, що випадок 2, вище, дає той же режим, і нічого іншого, тому що якщо\(k x_{1}-k x_{0}=2 n \pi\), то (5.44) має однакове значення для всіх\(x_{j}\). Решта режимів показані в\(Figures \text { } 5.14 \text{-} 5.16\). Ця система проілюстрована в програмі 5-3 на диску програми.

Малюнок\( 5.14\):\(n = 1\),\(A_{j}=\cos [(j-1 / 2) \pi / 4]\).
Малюнок\( 5.15\):\(n = 2\),\(A_{j}=\cos [(j-1 / 2) 2 \pi / 4]\).