5.1: Інваріантність космічного перекладу
- Page ID
- 79273


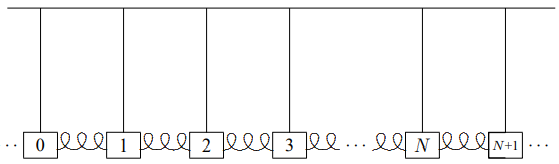
Малюнок\( 5.1\): Скінчена система зв'язаних маятників.
Типова система зв'язаних осциляторів, яка підтримує хвилі, є такою, як система\(N\) однакових пов'язаних маятників, показана на малюнку\( 5.1\). Ця система є узагальненням системи двох пов'язаних маятників, яку ми вивчали в розділах 3 і 4. Припустимо, що кожен маятник боб має масу\(m\), кожен маятник має довжину\(\ell\), кожна пружина має постійну пружину\(\kappa\) і рівноважний поділ між бобами є\(a\). Припустимо далі, що тертя немає і що маятники обмежені коливатися тільки в тому напрямку, в якому натягнуті пружини. Нас цікавить вільне коливання цієї системи, без зовнішньої сили. Таке коливання, коли рух паралельно напрямку, в якому система розтягується в просторі, називається «поздовжнім коливанням». Викликати поздовжнє зміщення\(j\) го боба від рівноваги (\ psi_ {j}\). Ми можемо організувати зсуви в вектор,\(\Psi\) (з причин, які стануть зрозумілими нижче, це було б заплутаним у використанні\(X\), тому ми вибираємо іншу букву, грецька буква psi, яка виглядає як\(\psi\) у нижньому регістрі та\(\Psi\) коли з великої літери):\ [\ Psi =\ left (\ begin {array} {c}
\ psi_ {1}\
\ psi_ {2}\
\ psi_ {3}\
\ vdots\\
\ psi_ {N}
\ кінець {масив}\ праворуч).\]
Тоді рівняння руху (для малих поздовжніх коливань)\[\frac{d^{2} \Psi}{d t^{2}}=-M^{-1} K \Psi\]
де\(M\) діагональна матриця with\(m\) вздовж діагоналі,\ [\ left (\ begin {масив} {ccccc}
m & 0 & 0 &\ cdots &
0\\ 0 & m & 0 &\ cdots &
0\\ cdots & 0\\ vdots &
\\ vdots &\ vdots &\ ddots &\\ vdots\\
0 & 0 &\ cdots & m
\ end {масив}\ праворуч),\]
і\(K\) має діагональні елементи\((m g / \ell+2 \kappa)\)\(-\kappa\), елементи поруч з діагоналлю та нулі в іншому місці,\ [\ left (\ begin {масив} {ccccc}
m g/\ ell+2\ kappa & -\ kappa & 0\ cdots & 0\\
-\ kappa & m g/\ ell+2\ kappa &\ cdots & 0\\
0 & -\ kappa & m g/\ ell+2\ kappa &\ cdots & 0\\ vdots &
\\ vdots &\ vdots &\ ddots &\\ vdots\\
0 & 0 &\ cdots & m/\ ell+2\ kappa
\ end {масив}\ праворуч).\]
\(- \kappa\)У наближених до діагоналі елементи мають точно таке ж походження, як і\(- \kappa\) в\(2 \times 2 \text { } K\) матриці в (3.78). У ній описується зчеплення двох сусідніх блоків пружиною. \((m g / \ell+2 \kappa)\)На діагоналі аналогічний\((m g / \ell+ \kappa)\) по діагоналі (3,78). Різниця в коефіцієнті 2 в коефіцієнті\(\kappa\) виникає через те, що є дві пружини, по одній з кожного боку, які сприяють відновлювальному зусиллю на кожному блоці в системі, показаної на малюнку\( 5.1\), в той час як в системі була тільки одна, показана на малюнку\( 3.1\). Таким чином\(M^{- 1}K\) має вигляд\ [\ left (\ begin {масив} {ccccc}
2 B & -C & 0 &\ cdots & 0\\
-C & 2 B & -C &\\ cdots &
0\\ cdots & 0\\ vdots &
\ vdots &\\ vdots &\\ dots &\ vdots\\
0 & 0 & 0 &\ cdots & 2 B
\ end {масив}\ праворуч)\]
де\[2 B=g / \ell+2 \kappa / m, \quad C=\kappa / m .\]
Цікаво порівняти матрицю (5.5) з матрицею, (4.43), з попередньої глави. В обох випадках діагональні елементи все рівні, через симетрії. Те ж саме стосується наближених до діагоналі елементів. Однак у (5.5) всі інші елементи дорівнюють нулю, оскільки взаємодія відбувається лише між найближчими сусідніми блоками. Ми називаємо такі взаємодії «локальними». У (4.43), з іншого боку, кожна з мас взаємодіє з усіма іншими. Ми будемо використовувати локальний характер взаємодій нижче.
Ми могли б спробувати знайти нормальні режими цієї системи безпосередньо, знайшовши власні вектори\(M^{- 1}K\), але є набагато простіша і більш корисна техніка. Ми можемо розділити фізику системи на дві частини: фізику з'єднаних маятників та фізику стін. Для цього спочатку розглянемо нескінченну систему, яка взагалі не має стін.
Малюнок\( 5.2\): Шматок нескінченної системи з'єднаних маятників.
Зверніть увагу\( 5.2\), що на малюнку ми взагалі не змінили інтер'єр системи, зображеної\( 5.1\) на малюнку. Ми тільки що замінили стіни продовженням інтер'єру.
Тепер ми можемо знайти всі режими нескінченної системи Figure\( 5.2\) дуже легко, використовуючи аргумент симетрії. Нескінченна система Фігури\( 5.2\) виглядає однаково, якщо вона перекладена, переміщена вліво або вправо кратним поділу рівноваги,\(a\). Він має властивість «інваріантність космічного перекладу». Інваріантність космічного перекладу — це симетрія нескінченної системи при перекладах кратними числами\(a\). У цьому прикладі через дискретні блоки та скінченну довжину пружин інваріантність космічного перекладу є «дискретною». Тільки переклад інтегральними кратними\(a\) дають однакову фізику. Пізніше ми обговоримо неперервні системи, які мають неперервну інваріантність космічного перекладу. Однак ми побачимо, що такі системи можна проаналізувати за допомогою тих самих методів, які ми впроваджуємо в цьому розділі.
Ми можемо використовувати симетрію інваріантності космічного перекладу, подібно до того, як ми використовували симетрії відображення та обертання, розглянуті в попередньому розділі, щоб знайти нормальні режими нескінченної системи. Дискретна космічна інваріантність перекладу нескінченної системи (симетрія при перекладах кратними\(a\)) дозволяє знайти нормальні режими нескінченної системи простим способом.
Більшість режимів, які ми знаходимо за допомогою інваріантності космічного перекладу нескінченної системи Figure, не\( 5.2\) матимуть нічого спільного з скінченною системою, показаною на рис\( 5.1\). Але якщо ми можемо знайти лінійні комбінації нормальних режимів нескінченної системи Фігури,\( 5.2\) в яких 0-й і\(N\) + 1-й блоки залишаються фіксованими, то вони повинні бути розв'язками рівнянь руху системи, показаних на рис\( 5.1\). Причина в тому, що взаємодії між блоками є «локальними» — вони відбуваються тільки між найближчими сусідніми блоками. Таким чином, блок 1 знає, що робить блок 0, але не те, що робить блок −1. Якщо блок 0 нерухомий, він також може бути стіною, оскільки блоки з іншого боку ніяк не впливають на блок 1 (або будь-який з блоків 1 до\(N\)). Локальний характер взаємодії дозволяє поставити в фізику стін як граничну умову після розв'язання нескінченної задачі. Цей же трюк також дозволить нам вирішити багато інших проблем.
Давайте подивимося, як це працює для системи, показаної на малюнку\( 5.1\). По-перше, ми використовуємо симетрію під перекладами, щоб знайти нормальні режими нескінченної системи Figure\( 5.2\). Як і в попередніх двох розділах, ми описуємо розв'язки з точки зору вектора,\(A\). Але тепер\(A\) має нескінченну кількість компонентів,\(A_{j}\) де ціле число\(j\) працює від\(- \infty\) до\(+ \infty\). Записати цей нескінченний вектор вниз трохи незручно, але ми можемо уявити його шматок:\ [A=\ left (\ begin {масив} {c}
\ vdots\\
A_ {0}\
A_ {1}\
A_ {2}\
A_ {3}\\
\ vdots\\
A_ {N}\\
A_ {N+1}\
\ vdots
\ end {масив}\ справа).\]
Аналогічно\(M^{- 1}K\) матриця для системи є нескінченною матрицею, не легко записаної, але будь-який її шматок (по діагоналі) виглядає як внутрішня частина (5.5):\ [\ left (\ begin {array} {cccccc}
\ ddots &\ vdots &\ vdots &\ vdots &\
\ ddots &\ підсилювач; 2 B & -C & 0 & 0 &\ cdots
\\\ cdots & -C & 2 B & -C & 0 &
\ cdots\\\ cdots & 0 & -C & 2 B & -C &
\\ cdots\\\ cdots\\ cdots & 0 &\\ dots &
vdots &\ vdots &\ vdots &\ ddots
\ end {масив}\ справа).\]
Ця система є «інваріантною трансляції простору», оскільки вона виглядає однаково, якщо її переміщати вліво на відстань\(a\). Це переміщує блок\(j+1\) туди, де\(j\) раніше був блок, таким чином, якщо є режим з компонентами\(A_{j}\), повинен бути інший режим з тією ж частотою, представлений вектором,\ (A^ {\ prime} = SA|), з компонентами\[A_{j}^{\prime}=A_{j+1} .\]
Матриця симетрії - це нескінченна матриця з 1s уздовж діагоналі.\(S\) Вони аналогічні 1s уздовж діагоналі поруч з діагоналлю в (4.40). Однак зараз трансформація ніколи не закривається на собі. Аналога 1 в нижньому лівому куті (4.40) немає, тому що нескінченна матриця не має кута. Ми хочемо знайти власні значення та власні вектори матриці\(S\), що задовольняють\[A^{\prime}=S A=\beta A\]
або еквівалентно (від (5.9)), режими в яких\(A_{j}\) і\(A_{j}^{\prime}\) пропорційні:\[A_{j}^{\prime}=\beta A_{j}=A_{j+1}\]
де\(\beta\) деяка ненульова константа. 1
Рівняння (5.11) можна вирішити наступним чином: Виберіть\(A_{0} = 1\). Тоді\(A_{1} = \beta\)\(A_{2} = \beta^{2}, etc., so that \(A_{j} = (\beta)^{j}\) для всіх ненегативних\(j\). Ми також можемо переписати (5.11) як\(A_{j-1}=\beta^{-1} A_{j}\), так що\(A_{-1} = \beta_{-1\)\(A_{-2} = \beta_{-2}\), і т.д. таким чином рішення\[A_{j}=(\beta)^{j}\]
Тепер, коли ми знаємо форму нормальних режимів, легко отримати відповідні частоти, впливаючи на (5.12) з\(M^{-1}K\) матрицею, (5.8). Це дає\[\omega^{2} A_{j}^{\beta}=2 B A_{j}^{\beta}-C A_{j+1}^{\beta}-C A_{j-1}^{\beta} ,\]
або вставлення (5.13),\[\omega^{2} \beta^{j}=2 B \beta^{j}-C \beta^{j+1}-C \beta^{j-1}=\left(2 B-C \beta-C \beta^{-1}\right) \beta^{j} .\]
Це вірно для всіх\(j\), що показує, що (5.13) дійсно є власним вектором (ми вже знали це з аргументу симетрії, (4.22), але це приємно перевірити, коли це можливо), а власне значення є\[\omega^{2}=2 B-C \beta-C \beta^{-1} .\]
Зверніть увагу, що майже для кожного значення\(\omega^{2}\), є два нормальних режими, тому що ми можемо обмінюватися\(\beta\) і\(\beta^{-1}\) без зміни (5.16). Виняток становлять лише\[\omega^{2}=2 B \mp 2 C ,\]
що відповідає\(\beta=\pm 1\). Той факт, що існує не більше двох нормальних режимів для кожного значення\(\omega^{2}\) матиме драматичний наслідок. Це означає, що нам доведеться мати справу лише з двома нормальними режимами одночасно, щоб реалізувати фізику кордону. Це особливість одновимірної системи, яку не поділяють дво- і тривимірні системи. Як ми побачимо, це робить одновимірну систему дуже простою в обробці.
граничні умови
 5-1 Зараз
5-1 Зараз
ми вирішили задачу коливання нескінченної системи. Озброївшись таким результатом, ми можемо знову занести фізику стін. Будь-який\(\beta\) (крім\(\beta=\pm 1\)) дає пару нормальних режимів для нескінченної системи Figure\( 5.2\). Але тільки спеціальні значення\(\beta\) будуть працювати для скінченної системи, показаної на малюнку\( 5.1\). Для пошуку нормальних режимів роботи системи, показаної на малюнку\( 5.1\), ми використовуємо (4.56), той факт, що будь-яка лінійна комбінація двох нормальних режимів з однаковою кутовою частотою\(\omega\), також є нормальним режимом. Якщо ми зможемо знайти лінійну комбінацію, яка зникає для\(j = 0\) і для\(j = N + 1\), це буде нормальний режим системи, показаний на малюнку\( 5.1\). Саме зникнення нормального режиму при\(j = 0\) і\(j = N + 1\) є «граничними умовами» для цієї конкретної скінченної системи.
Почнемо з спроби задовольнити граничну умову при\(j = 0\). Для кожного можливого значення\(\omega^{2}\), ми повинні турбуватися тільки про два нормальних режими, два рішення (5.16) для\(\beta\). До тих пір\(\beta \neq \pm 1\), поки ми можемо знайти комбінацію, яка зникає в\(j = 0\); просто відніміть два режими\(A^{\beta}\) і\(A^{\beta^{-1}}\) отримати вектор\[A=A^{\beta}-A^{\beta^{-1}} ,\]
або в компонентах\[A_{j} \propto A_{j}^{\beta}-A_{j}^{\beta^{-1}}=\beta^{j}-\beta^{-j} .\]
Перше, що слід помітити про (5.19), це те, що\(A^{j}\) не може зникнути ні для кого,\(j \neq 0\) якщо\(|\beta|=1\). Таким чином, якщо ми маємо шанс задовольнити граничну умову в\(j = N + 1\), ми повинні припустити, що\[\beta=e^{i \theta} .\]
Тоді з (5.19),\[A_{j} \propto \sin j \theta .\]
Тепер ми можемо задовольнити граничну умову при\(j = N + 1\) встановленні\(A_{N + 1} = 0\). Це має на увазі\(\sin [(N+1) \theta]=0\), або\[\theta=n \pi /(N+1), \text { for integer } n .\]
Таким чином, нормальні режими системи, показані на малюнку\( 5.1\), є\[A_{j}^{n}=\sin \left(\frac{j n \pi}{N+1}\right), \text { for } n=1,2, \cdots N .\]
Інші значення\(n\) не призводять до нових режимів, вони просто повторюють\(N\) режими вже показані в (5.23). Відповідні частоти отримують шляхом введення (5.20) - (5.21) в (5.16), щоб отримати\[\omega^{2}=2 B-2 C \cos \theta=2 B-2 C \cos \left(\frac{n \pi}{N+1}\right) .\]
Звідси аналіз руху системи такий же, як і для будь-якої іншої системи зв'язаних осциляторів. Як обговорювалося в розділі 3, ми можемо розділити загальний рух і висловити його як суму нормальних режимів. Це проілюстровано для системи зв'язаних маятників в програмі 5-1 на диску програми. Нове в цій системі - це спосіб, яким ми отримали нормальні режими та їх своєрідно просту форму з точки зору тригонометричних функцій. Ми отримаємо більше розуміння значення цих режимів у наступному розділі. Тим часом зверніть увагу на спосіб, за допомогою якого прості режими можна об'єднати в дуже складний рух повної системи.
___________________
1 Нуль не працює,\(\beta\) оскільки рівняння власного значення не має рішення.