9.E: Консервативні сили (вправи)
- Page ID
- 76266

Скільки часу потрібно частинці, щоб впасти на землю з висоти\( h\), with a uniform acceleration \( g\)? From elementary methods you know that the answer is \( \sqrt{\frac{2h}{g}}\), but we are going to use this simple example to illustrate the use of Equation 9.2.9. The use of the equation to solve such a simple problem might seem a rather tedious way of solving an elementary problem, but the method is useful in more difficult cases, and the use of the method is best introduced with a simple example.
Візьмемо походження, щоб бути землею, і ми будемо вимірювати відстані\( y\) upward from the ground. The speed is then given by \( v=-\frac{dy}{dt}\), so we use the negative sign in Equation 9.2.9a. The initial and final values of \( y\) are \( h\) and 0 respectively. Alternatively, you can use Equation 9.2.9b, with the positive sign, in which case the loser and upper limits of integration are 0 and \( h\) respectively.
Загальна енергія\( E\) is the initial potential energy \( mgh\) (since the initial kinetic energy is zero), and the potential energy at height \( y\) is \( V(y) = mgy\) Equation 9.2.9 therefore takes the form
\[ t=-\sqrt{\frac{m}{2}}\int_{h}^{0}\frac{dy}{\sqrt{mgh-mgy}}. \nonumber \]
Скільки часу потрібно для частинки, кинутої вертикально вгору з початковою швидкістю\( v_{0}\), to reach a height \( h\)? Again, by elementary methods, you will easily find (do it!) that the answer is \( t=\frac{v_{0}-\sqrt{v_{0}^{2}-2gh}}{g}\), but let’s see if we can do it from Equation 9.2.9.
Візьмемо походження, щоб бути землею, і ми будемо вимірювати відстані\( y\) upward from the ground. The speed is then given by \( v=+\frac{dy}{dt}\), so we use the positive sign in Equation 9.2.9. The initial and final values of \( y\) are 0 and \( h\) respectively.
Таким чином, загальне\( E\) is the initial kinetic energy \( \frac{1}{2}mv_{0}^{2}\)(since the initial potential energy is zero), and the potential energy at height \( y\) is \( V(y)=mgy\). рівняння енергії 9.2.9 набуває вигляду
\[ t=+\sqrt{\frac{m}{2}}\int_{0}^{h}\frac{dy}{\sqrt{\frac{1}{2}mv_{0}^{2}-mgy}}. \nonumber \]
Це дає очікувану відповідь
\[ t=\frac{v_{0}-\sqrt{v_{0}^{2}-2gh}}{g}. \nonumber \]
У цьому прикладі ми матимемо камінь, що падає з висоти, яка не є незначною порівняно з радіусом Землі, щоб прискорення не було постійним. Припустимо, що ми скидаємо камінь з точки на відстані.\( r = b\) from the centre of the Earth, and we ask how long it will take to reach the surface of the Earth, radius \( a\).
Візьмемо початок, щоб бути центром Землі, і ми будемо вимірювати відстані\( r\) radially outward from the centre. The speed is then given by \( v=-\frac{dy}{dt}\), so we use the negative sign in Equation 9.2.9. The initial and final values of \( r\) are \( b\) and \( a\) respectively.
Таким чином, загальне\( E\) is the initial potential energy \( -\frac{GMm}{b}\)(since the initial kinetic energy is zero), and the potential energy at distance \( r\) from the centre is \( V(r)=-\frac{GMm}{r}\). рівняння енергії 9.2.9 набуває вигляду
\[ t=-\sqrt{\frac{m}{2}}\int_{b}^{a}\frac{dr}{\sqrt{\frac{GMm}{r}-\frac{GMm}{b}}} \label{eq:9.3.4} \]
Гравітація на поверхні Землі\( g_{0}=\frac{GM}{a^{2}}\) така, що рівняння\( \ref{eq:9.3.4}\) можна записати
\[ t=-\frac{1}{a}\sqrt{\frac{b}{2g_{0}}}\int_{b}^{a}\frac{dr}{\sqrt{\frac{b}{r}-1}} \label{eq:9.3.5} \]
Це може бути інтегровано аналітично, щоб дати
\[ t=\frac{b}{a}\sqrt{\frac{b}{2g_{0}}}\int_{b}^{a}(\alpha+\frac{1}{2}\sin2\alpha), \label{eq:9.3.6} \]
де
\[ \cos^{2}\alpha=\frac{a}{b}. \label{eq:9.3.7} \]
Ось числовий приклад: Скільки часу знадобиться, щоб камінь впав на Землю з початкової висоти 240 000 миль? У разі якщо вищевказаний спосіб занадто складний, ось ще один спосіб зробити це - в голові за кілька секунд!
240 000 миль - радіус орбіти Місяця. Камінь падає на високо еліптичну орбіту великої осі, рівній відстані до Місяця - тобто його велика піввісь вдвічі менше, ніж Місяць. Тому за третім законом Кеплера його період дорівнює місяцю Місяця (який становить 28 днів), розділеному на\( 2\sqrt{2}\) which is 2.8. The orbital period of the stone is therefore 10 days. The time taken to drop to Earth is half of this, or five days. You might want to calculate it from Equations \( \ref{eq:9.3.6}\) and \( \ref{eq:9.3.7}\) and see if you get the same answer!
Відповідь полягає в тому, що це чотири рази більше часу, який потрібно, щоб піднятися з вертикального положення на кут.\( \alpha\) from the vertical. Thus we shall work out this time from Equation 9.2.10 and multiply by four.
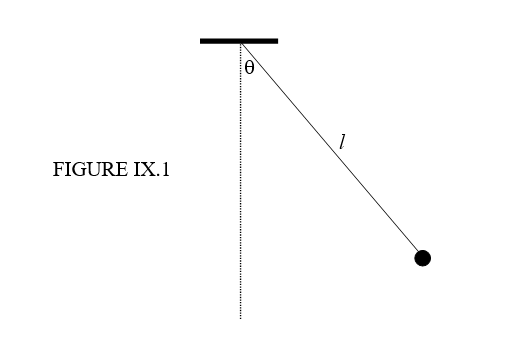
Приймемо верхній кінець рядка як наш рівень для нульової потенційної енергії. Потенційна енергія\( V(\theta)\) is then \( -mgl\cos\theta\). The total energy \( E\) is equal to the potential energy when \( \theta=\alpha\); that is to say, \( E=-mgl\cos\alpha\). If we take the initial angle to be 0 and the final angle to be \( \alpha\), then the upward motion is such that \( \omega=+\frac{d\theta}{dt}\), and we choose the positive sign for Equation 9.2.10. The rotational inertia \( I\) is \( ml^{2}\). Thus Equation 9.2.10 gives
\[ P=4t=\sqrt{\frac{8l}{g}}\int_{0}^{\alpha}\frac{d\theta}{\sqrt{\cos\theta-\cos\alpha}}. \label{eq:9.3.8} \]
This can doubtless be expressed in terms of special functions that most of us are unfamiliar with, so you will probably opt to evaluate this numerically as a function of \( \alpha\). There is a small difficulty at the upper limit of the integration when the integrand becomes infinite. Indeed, in all cases in which the system is at rest at either the start or the finish, the denominator of Equation 9.2.9 or 9.2.10 will necessarily be zero and hence the integrand will be infinite. In some cases, as in examples (i) to (iii), the integral can be done analytically and there is no problem. If, however, as in the present example, the integration has to be done numerically, there is a potential problem and some ingenuity (often by making a change of variable) will have to be exercised.
Using a trigonometric identity, you can write Equation \( \ref{eq:9.3.8}\) as
\[ P=\sqrt{\frac{4l}{g}}\int_{0}^{\alpha}\frac{d\theta}{\sqrt{\sin^{2}\frac{1}{2}\alpha-\sin^{2}\frac{1}{2}\theta}}. \nonumber \]
This doesn't get rid of the infinity, but now make a change of variable by letting
\[ \sin\frac{1}{2}\theta=\sin\frac{1}{2}\alpha\sin\phi \nonumber \]
and the difficulty will disappear. In particular, the expression for the period becomes
\[ P=\sqrt{\frac{l}{g}}\times\frac{2}{\pi}\int_{0}^{\frac{\pi}{2}}\frac{d\phi}{\sqrt{1-\sin^{2}\frac{1}{2}\alpha.\sin^{2}\phi}}. \nonumber \]
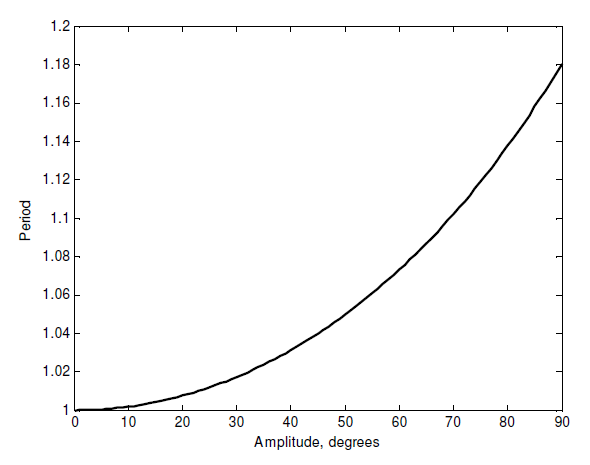
Below is a graph of the period, in units of \( 2\pi\sqrt{\frac{l}{g}}\) versus \( \alpha\).
A further question might be asked. For example: What is the amplitude of the pendulum swing such that the period is 10 percent more than the small angle limit of \( 2\pi\sqrt{\frac{l}{g}}\)? In other words, solve the equation \( \frac{\sqrt{2}}{\pi}\int_{0}^{\alpha}\frac{d\theta}{\sqrt{\cos\theta-\cos\alpha}}=1.1\) for \( \alpha\). This will be quite a challenge.
I make it \( \alpha\) = 69º.325146
A Semicircle, a Ring and a String
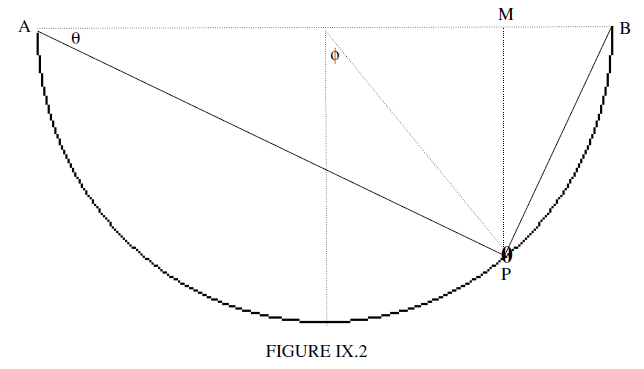
In this example, we have a smooth semicircular wire in a vertical plane. The radius of the semicircle is \( a\). A ring of mass \( m\) at P can slide smoothly around the ring. An elastic string of natural length \( 2a\) is attached to the ends of the wire at A and B and is threaded through the ring. The force constant of the string is \( k\). The ring is subjected to three conservative forces - gravity and the tensions in the two parts of the string. The ring is smooth, so there is no nonconservative friction.
By geometry the lengths of the following are
AP: \( 2a\cos\theta\)
BP: \( 2a\sin\theta\)
PM: \( 2a\sin\theta\cos\theta=a\sin 2\theta\)
We are going to find the equilibrium position(s) of the ring, and see how long it takes to slide from one position on the semicircle to another.
Before doing any calculations, let's think about the physics qualitatively. Suppose that it is a very heavy ring and a weak string. In that case the ring will surely slide down to the bottom of the semicircle and stay there. On the other hand suppose that the ring is not very heavy but the string is quite strong. In that case we may well imagine that the ring may rest in stable equilibrium farther up the semicircle; indeed, if the string is very strong, the stable equilibrium position of the ring might be quite near the top. Of course, by the symmetry of the situation, there will always be an equilibrium position at the bottom of the semicircle, but, if the string is very strong, this position will be unstable, and, upon the slightest displacement, the ring will snap up to a higher position. Whether the position at the bottom of the semicircle will be stable or unstable depends on the relative strengths of the weight of the ring and the tension in the string. Let us then, in anticipation, refer to the ratio \( \frac{mg}{ka}\) by the symbol \( \lambda\). In fact we shall find that if \( \lambda\) > 0.586, the position at the bottom of the semicircle will be stable, but if \( \lambda\) is less than this the positions of stable equilibrium will be higher up.
The extension of the string above its natural length is \( 2a(\cos\theta+\sin\theta-1)\) and the depth of the ring below AB is \( a\sin2\theta\).Therefore, if we take AB to be the level for zero gravitational potential energy, the potential energy (elastic plus gravitational)) is
\( V(\theta=\frac{1}{2}\lfloor2a(\cos\theta+\sin\theta-1)^{2}\rfloor-mga\sin2\theta\)
\[ =ka^{2}\lfloor2(\cos\theta+\sin\theta-1)^{2}-\lambda\sin2\theta\rfloor. \label{eq:9.3.11} \]
Figure IX.3 shows this potential energy as a function of \( \theta\) for several values of \( \lambda\), including 0.586. We can see that, for \( \lambda\) greater than this, the position at the bottom of the ring (\( \theta\) = 45o) is the only equilibrium position and it is stable. For small values of \( \lambda\), the bottom, while an equilibrium position, is unstable, and there are two stable positions higher up. To calculate these equilibrium positions exactly, we need to determine where the derivative of \( V\) is zero, and to find whether these positions are stable or unstable, we need to examine the sign of the second derivative.
I leave it to the reader to work through the first derivative and to show that one condition for the derivative to be zero is for \( \cos\theta\) to equal \( \sin\theta\); that is, \( \theta\) = 450 , which corresponds to the bottom of the semicircle. Another condition for the first derivative to be zero is slightly more challenging to find, but you should find that the derivative is zero if
\[ \sin(\theta+\frac{\pi}{4})=\frac{\sqrt{2}}{2-\lambda}. \nonumber \]

This corresponds to a real value of \( \theta\) only if \( \lambda \leq 2-\sqrt{2}=0.586\). The second derivatives are necessary to determine whether the equilibria are stable (\( V\) a minimum) or unstable (\( V\) a maximum) or a glance at figure IX.3 will be easier.
Now let's express the potential energy as a function \( U\) of the angle \( \phi\), so that \( U(\phi)=V(\theta)\). From Figure IX.2, we see that \( \phi=90^{\circ}-2\theta\). After some algebra and trigonometry, I find that the potential energy as a function of \( \phi\) is given by
\[ \frac{U(\phi)}{ka^{2}}=4\cos^{2}\frac{1}{2}\phi-4\sqrt{2}\cos\frac{1}{2}\phi-\lambda\cos\phi-\lambda-4+4\sqrt{2}. \nonumber \]
Now expand this carefully by Taylor's theorem as far as \( \phi^{2}\):
\[ \frac{U(\phi)}{ka^{2}}=2(\lambda+\sqrt{2}-2)\phi^{2}. \nonumber \]
What we have done is to approximate the potential energy function \( U(\phi)\) by a parabola for small \( \phi\). Now a parabolic potential well is characteristic of simple harmonic motion. For example, in linear simple harmonic motion obeying the equation \( m\ddot{x}=-kx\) the potential energy per unit mass is \( \frac{1}{2}kx^{2}\) and the period is \( 2\pi\sqrt{\frac{m}{k}}\). In rotational simple harmonic motion obeying the equation \( I\ddot{\theta}=-c\theta\) the potential energy per unit rotational inertia is \( \frac{1}{2}c\theta^{2}\) and the period is \( 2\pi\sqrt{\frac{I}{c}}\). The rotational inertia here is just \( ma^{2}\), so we find that the period of small oscillations is
\[ P=\pi\sqrt{\frac{\lambda a}{(\lambda+\sqrt{2}-2)g}}, \label{eq:9.3.15} \]
provided, of course, that \( \lambda>2-\sqrt{2}\).
If you want to find how long the ring takes to slide from an initial position \( \phi=\alpha\) to the bottom you can use Equations 9.2.10 and \( \ref{eq:9.3.11}\), with \( E=U(\alpha)\). You will find the usual difficulty that the integrand is zero at the start. I haven't actually tried the problem, because it looks slightly tedious, but I am fairly certain that it can be integrated analytically. If you do it and get an answer, make sure that, in the limit of small \( \phi\), you get the same as Equation \( \ref{eq:9.3.15}\)
A rod of length \( 2l\) and mass \( m\) has one end freely pivoted on a horizontal floor. The rod is held at an initial angle of 45o to the vertical and then released. How long does it take for the rod to hit the floor? I'll leave you to work this one out. By the way, if I had started with the rod vertical, you would find that it takes an infinite time to fall - because the vertical position, although unstable, is an equilibrium position, and it would never get going unless given an infinitesimal displacement.