9.3: Віртуальна робота
- Page ID
- 76267

Ми бачили, що механічна система, підвладна консервативним силам, знаходиться в рівновазі, коли похідні потенційної енергії щодо координат дорівнюють нулю. Таким чином, метод вирішення таких задач полягає в тому, щоб записати вираз для потенційної енергії і поставити похідні рівні нулю.
Дуже схожим методом є використання принципу віртуальної роботи. У цьому методі ми уявляємо, що ми діємо на систему таким чином, щоб збільшити одну з координат. Ми уявляємо, наприклад, що станеться, якби ми розтягнули одну з пружин, або збільшити кут між двома з'єднаними стрижнями, або кут, який робить сходи, коли вона спирається на стіну. Ми запитуємо себе, скільки роботи нам належить зробити над системою, щоб збільшити цю координату на невелику суму. Якщо система почне з рівноваги, то ця робота буде дуже маленькою, і, в межі нескінченно малого переміщення, ця «віртуальна робота» буде дорівнює нулю. Цей метод дуже мало відрізняється від установки похідної потенційної енергії в нуль. Я згадую це тут, однак, тому що концепція може бути корисною в главі 13 при описі варіаційного принципу Гамільтона.
Почнемо з виконання простої сходової задачі методом віртуальної роботи. Звичайна рівномірна сходи середньої школи фізики, довжини\( 2l\) і ваги\( mg\), спирається в граничній статичній рівновазі на звичайну гладку вертикальну стіну і чорнову горизонтальну підлогу, коефіцієнт граничного статичного тертя якого дорівнює\( \mu\). Який кут робить\(\theta \) сходи з вертикальною стіною?
Я намалював чотири сили на сходах, а саме: її вага\( mg\); нормальна реакція статі на сходах, яка теж повинна бути\( mg\); сила тертя, яка є\( \mu mg\); і нормальна (і єдина) реакція стіни на сходи, яка теж повинна бути\( \mu mg\).
Існує кілька способів зробити це, які будуть знайомі багатьом читачам. Єдине невелике нагадування, яке я дам, - це зазначити, що, якщо ви хочете об'єднати дві сили біля підніжжя сходів в єдину силу, що діє вгору і трохи вліво, так що тоді на сходах діють лише три сили, три сили повинні діяти через єдину точку, яка буде вище середини сходів і праворуч від точки зіткнення зі стіною. Але ми зараз зацікавлені у вирішенні цієї проблеми за принципом віртуальної роботи.
Перш ніж почати, я повинен попередити, що при використанні принципу віртуальної роботи важливо ретельно ставитися до знаків, і в цьому відношенні нагадую читачам, що в диференціальному численні символи\( \delta\) і\( d\) перед скалярною величиною\( x\) не означають «невелика зміна в » або «нескінченно мала зміна» в\( x\). Така мова розпливчаста. Символи означають «невелике збільшення» і «нескінченно мале збільшення».
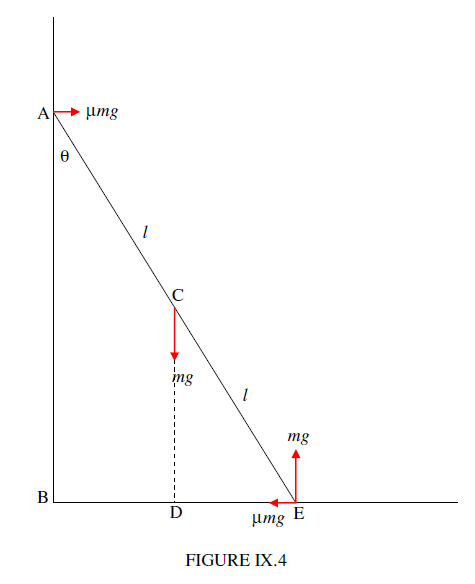
Візьмемо до уваги наступні відстані:
\[ CD = l \cos \theta \nonumber \]
і
\[ BE = 2l \sin \theta. \nonumber \]
Якби ми збільшували\( \theta\) by \( \delta\theta\), keeping the ladder in contact with wall and floor, the increases in these distances would be
\[ \delta(CD)=-l\sin\theta d\theta. \nonumber \]
і
\[ \delta(BE)=2l\cos\theta d\theta. \nonumber \]
Далі, якщо б збільшити в\( \theta\) by \( \delta\theta\), the work done by the force at C would be \( mg\) times the decrease of the distance CD, and the work done by the frictional force at E would be minus \( \mu mg\) рази збільшення відстані BE. Дві інші сили не працюють. Таким чином, «віртуальна робота», виконана зовнішніми силами на сходах, є
\[ mg. l\sin\theta\delta\theta-\mu mg.2l \cos\theta\delta\theta. \nonumber \]
Поставивши вираз для віртуальної роботи в нуль, отримаємо
\[ \tan\theta=2\mu. \nonumber \]
Ви повинні переконатися, що це така ж відповідь, як і від інших методів, найпростіший з яких, ймовірно, прийняти моменти про Е.
У віртуальній роботі є щось, що нагадує мені термодинаміку. Перший закон термодинаміки, наприклад,\( \Delta U=\Delta q+\Delta w\), where \( \Delta U\) is the increase of the internal energy of the system, \( \Delta q\) is the heat added to the system, and \( \Delta w\) is the work done on the system. Prepositions play an important part in thermodynamics. It is always mandatory to state clearly and without ambiguity whether work is done by the piston on the gas, or by the gas on the system; or whether heat is gained by the system or lost from it. Without these prepositions, all discussion is meaningless. Likewise in solving a problem by the principle of virtual work, it is always essential to say whether you are describing the work done by a force on what part of the system (on the ladder or on the floor?) and whether you are describing an increase or a decrease of some length or angle.
Давайте перейдемо до дещо складнішої проблеми, яку ми спробуємо трьома різними методами, включаючи віртуальну роботу.
На малюнку IX.5 рівномірний стрижень AB ваги\( Mg\) and length \( 2a\) is freely hinged at A. The end B carries a smooth ring of negligible mass. A light inextensible string of length \( l\) has one end attached to a fixed point C at the same level as A and distant \( 2a\) from it. It passes through the ring and carries at its other end a weight \( \frac{1}{10}Mg\) hanging freely. (The “smooth” ring means that the tension in the string is the same on both sides of the ring.) Find the angle CAB when the system is in equilibrium.
Я позначив різні кути і довжини, які легко можна визначити по геометрії системи, а також я відзначив чотири сили на стрижні.

Спершу спробуємо дуже звичайний метод. Ми знаємо досить мало про силу R шарніра на стрижні (правда див. Нижче), а тому це вагомий привід для прийняття моментів про точку А.
\[ Mga\cos\theta+\frac{1}{10}Mg.2a\cos\theta=\frac{1}{10}Mg.2a\cos\frac{1}{2}\theta. \nonumber \]
Divide by \( Mga\) and set \( \cos\theta=2c^{2}-1\), where \( c=\cos\frac{1}{2}\theta\). After a little algebra, we obtain \( 12c^{2}-c-6=0\) and hence we find for the equilibrium condition that \( \theta\) = 82o 49' or 263o 37'. The latter, by the way, is a physically valid solution – you might want to sketch it.
Now let’s try the same problem using energy conditions. We’ll take the zero of potential energy when the rod is horizontal – at which time the small mass is at a distance l below the level AC.
When the angle CAB = \( \theta\), the distance of the centre of mass of the rod below AC is \( a\sin\theta\) and the distance of the small mass below AC is \( l-4a\sin\frac{1}{2}\theta+2a\sin\theta\) so that the potential energy is
\[ V=-Mga\sin\theta+\frac{1}{10}Mg[l-(l-4a\sin\frac{1}{2}\theta+2a\sin\theta)]=-\frac{2}{3}Mga(3\sin\theta-\sin\frac{1}{2}\theta) \nonumber \]
The derivative is
\[ \frac{dV}{d\theta}=-\frac{2}{3}Mga(3\cos\theta-\frac{1}{2}cos\frac{1}{2}\theta), \nonumber \]
and setting this to zero will produce the same results as before. Further differentiation (do it), or a graph of \( V\) : \( \theta\) (do it), will show that the 82o 49' solution is stable and the 263o 37' solution is unstable.
Now let’s try it by virtual work. We are going to increase \( \theta\) by \( \delta\theta\) and see how much work is done.
The distance of the centre of mass of the rod below AC is \( a\sin\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( a\cos\theta \delta\theta\), and the work done by \( Mg\) will be \( Mga \cos \theta \delta\theta\).
The distance of the ring below AC is \( 2a\sin\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( 2a\cos\theta\delta\theta\), and the work done by the downward force will be \( \frac{1}{10}Mg.2a\cos\theta \delta\theta\).
The distance BC is \( 4a\sin\frac{1}{2}\theta\), and if \( \theta\) increases by \( \delta\theta\), this will increase by \( 2a\cos\frac{1}{2}\theta\delta\theta\) and the work done by the sloping force will be MINUS \( \frac{1}{10}Mg.2a\cos\frac{1}{2}\theta\delta\theta\).
Thus the virtual work is
\[ Mg.a\cos\theta\delta\theta+\frac{1}{10}Mg.2a\cos\theta\delta\theta-\frac{1}{10}Mg.2a\cos\frac{1}{2}\theta\delta\theta. \nonumber \]
If we put this equal to zero, we obtain the same result as before.