11.5: Параметр довжини дуги та кривизна
- Page ID
- 60691

У звичайній розмові ми описуємо позицію як з точки зору часу, так і відстані. Наприклад, уявіть, як їздити в гості до друга. Якщо вона зателефонує і запитає, де ви знаходитесь, ви можете відповісти: «Я за 20 хвилин від вашого будинку», або ви можете сказати: «Я в 10 милі від вашого будинку». Обидві відповіді дають вашому другові загальне уявлення про те, де ви знаходитесь.
В даний час наші векторні функції мають визначені точки з параметром\(t\), який ми часто приймаємо для представлення часу. Розглянемо Малюнок\(\PageIndex{1a}\), де\(\vecs r (t) = \langle t^2-t,t^2+t\rangle\) зображено графіки і точки, відповідні\(t=0,\ 1\) і\(2\) показані. Зверніть увагу, як довжина дуги між\(t=0\) і\(t=1\) менше, ніж довжина дуги між\(t=1\) і\(t=2\); якщо\(t\) параметр - час і\(\vecs r\) положення, ми можемо сказати, що частка пройшла швидше,\([1,2]\) ніж на\([0,1]\).
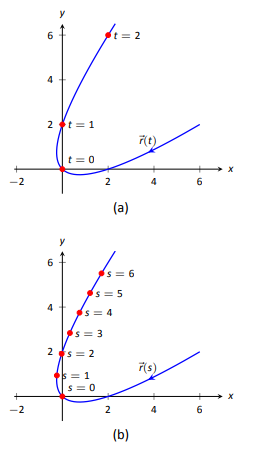
Тепер розглянемо Малюнок\(\PageIndex{1b}\), де один і той же графік параметризується іншою змінною\(s\). Наносяться точки\(s=6\), відповідні\(s=0\) наскрізному. Довжина дуги графіка між кожною сусідньою парою точок дорівнює 1. Ми можемо розглядати цей параметр\(s\) як відстань; тобто довжина дуги графіка від\(s=0\) до\(s=3\) дорівнює 3, довжина дуги від\(s=2\) до\(s=6\) дорівнює 4 і т.д. якщо потрібно знайти точку 2.5 одиниць від початкового місця (тобто\(s=0\)), можна буде обчислити\(\vecs r(2.5)\). Цей параметр\(s\) дуже корисний, і називається параметром довжини дуги.
Як ми знаходимо параметр довжини дуги?
Почніть з будь-якої параметризації\(\vecs r\). Ми можемо обчислити довжину дуги графіка\(\vecs r\) на інтервалі\([0,t]\) з\[\text{arc length } = \int_0^t\norm{\vecs r\,'(u)} du.\] Ми можемо перетворити це в функцію: як\(t\) змінюється, ми знаходимо довжину дуги\(s\) від\(0\) до\(t\). Ця функція є
\[s(t) = \int_0^t \norm{\vecs r\,'(u)} du.\label{eq:vvfarc}\]
Це встановлює взаємозв'язок між\(s\) і\(t\). Знаючи цей зв'язок явно, ми можемо переписати\(\vecs r(t)\) як функцію\(s\):\(\vecs r(s)\). Ми демонструємо це на прикладі.
Приклад\(\PageIndex{1}\): Finding the arc length parameter
Нехай\(\vecs r(t) = \langle 3t-1,4t+2\rangle\). Параметризуйте\(\vecs r\) параметром довжини дуги\(s\).}
Рішення
Використовуючи рівняння\ ref {eq:vvfarc}, запишемо
\[s(t) = \int_0^t \norm{\vecs r\,'(u)} du. \nonumber\]
Ми можемо інтегрувати це, явно знаходячи зв'язок між\(s\) і\(t\):
\ [\ почати {align*}
s (t) &=\ int_0^t\ норма {\ векс r\, '(u)} ду\\ [4pt]
&=\ int_0^t\ sqrt {3^2+4^2} ду\\ [4pt]
&=\ int_0^t 5 ду\\ [4pt]
&= 5t.
\ end {вирівнювати*}\]
Так як\(s=5t\), ми можемо записати\(t=s/5\) і\(\vecs r(t)\) замінити\(t\) в на\(s/5\):
\[\vecs r(s) = \langle 3(s/5)-1, 4(s/5)+2\rangle = \langle \dfrac35s-1,\dfrac45s+2\rangle. \nonumber\]
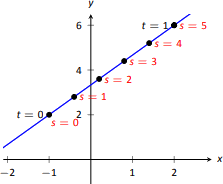
Зрозуміло, що як показано на малюнку\(\PageIndex{2}\), графік\(\vecs r\) є лінією, де\(t=0\) відповідає точка\((-1,2)\). Яка точка на лінії знаходиться на відстані 2 одиниць від цієї початкової точки? Знаходимо його с\(s(2) = \langle 1/5, 18/5\rangle\).
Чи\((1/5,18/5)\) дійсно точка 2 одиниць далеко від\((-1,2)\)? Використовуємо формулу відстані для перевірки:
\[ \begin{align*} d &= \sqrt{\left(\dfrac15-(-1)\right)^2+ \left(\dfrac{18}5-2\right)^2} \\[4pt] &= \sqrt{\dfrac{36}{25}+\dfrac{64}{25}} \\[4pt] = \sqrt{4}=2. \end{align*}\]
Так,\(s(2)\) дійсно 2 одиниці відстані, у напрямку руху, від початкової точки.
Речі спрацювали дуже добре в прикладі\(\PageIndex{1}\); ми змогли встановити безпосередньо, що\(s=5t\). Зазвичай параметр довжини дуги набагато складніше описати з точки зору\(t\), в результаті інтеграції квадратного кореня. Є ряд речей, які ми можемо дізнатися про параметр довжини дуги з Equation\ ref {eq:vvfarc}, однак, які є неймовірно корисними.
Спочатку візьміть похідне\(s\) по відношенню до\(t\). Фундаментальна теорема числення (див. Теорема 39) стверджує, що
\[\dfrac{ds}{dt}=s\,'(t) = \norm{\vecs r ^\prime(t)}.\label{eq:vvfarc3}\]
Дозволяючи\(t\)\(\vecs r(t)\) представляти час і представляти позицію, ми бачимо, що швидкість зміни щодо швидкості; тобто швидкість зміни «пройденої відстані» - це швидкість, яка повинна відповідати нашій інтуїції.\(s\)\(t\)
Правило ланцюга стверджує, що
\ [\ почати {вирівнювати*}
\ dfrac {d\ vecs r} {dt} &=\ dfrac {d\ vecs r} {ds}\ cdot\ dfrac {dt}\ [4pt]\ vecs r ^
\ прайм (т) &=\ vecs r ^\ прайм (s)\ cdot\ норма {\ vecs r ^\ прайм (т))}.
\ end {вирівнювати*}\]
Вирішуючи для\(\vecs r ^\prime(s)\), ми маємо
\[\vecs r ^\prime(s) = \dfrac{\vecs r ^\prime(t)}{\norm{\vecs r ^\prime(t)}} = \vecs T(t),\label{eq:vvfarc2}\]
де\(\vecs T(t)\) - одиничний тангенс вектора. Рівняння\ ref {eq:vvfarc2} часто неправильно інтерпретується, оскільки виникає спокуса думати\(\vecs r ^\prime(t) = \vecs T(t)\), що воно стверджує, але існує велика різниця між\(\vecs r ^\prime(s)\) і\(\vecs r ^\prime(t)\). Ключ, який потрібно взяти з нього, полягає в тому, що\(\vecs r ^\prime(s)\) є одиничним вектором. Насправді наступна теорема стверджує, що це характеризує параметр довжини дуги.
Теорема 99: Параметр довжини дуги
\(\vecs r(s)\)Дозволяти бути векторно-значною функцією. Параметр\(s\) є параметром довжини дуги якщо, і тільки якщо,\(\norm{\vecs r ^\prime(s)} = 1.\)
викривлення
Розглянемо точки\(A\) і\(B\) на кривій, зображеній на малюнку\(\PageIndex{3a}\). Можна з легкістю стверджувати, що крива крива більш різко при\(A\), ніж при\(B\). Корисно використовувати число, щоб описати, наскільки різко крива згинається; це число є кривизною кривої.
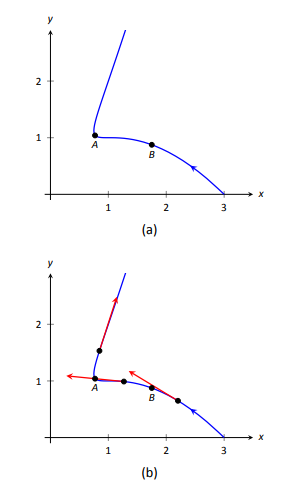
Виводимо це число наступним чином. Розглянемо Малюнок\(\PageIndex{3b}\), де одиничні дотичні вектори графуються навколо точок\(A\) і\(B\). Зверніть увагу, як напрямок вектора дотичної одиниці змінюється зовсім трохи поблизу\(A\), тоді як він не змінюється так сильно навколо\(B\). Це призводить до важливого поняття: вимірювання швидкості зміни одиничного тангенса вектора по відношенню до довжини дуги дає нам вимір кривизни.
Визначення\(\PageIndex{1}\): Curvature
\(\vecs r(s)\)Дозволяти векторно-значною функцією, де\(s\) є параметр довжини дуги. \(\kappa\)Кривизна графіка\(\vecs r(s)\) є
\[\kappa = \norm{\dfrac{d\vecs T}{ds}} = \norm{\vecs T\,'(s)}.\]
Якщо\(\vecs r(s)\) параметризується параметром довжини дуги, то
\[\vecs T(s) = \dfrac{\vecs r ^\prime(s)}{\norm{\vecs r ^\prime(s)}} \quad \text{and}\quad \vecs N(s) = \dfrac{\vecs T\,'(s)}{\norm{\vecs T\,'(s)}}.\]
Визначившись\(\norm{\vecs T\,'(s)} =\kappa\), ми можемо переписати друге рівняння як
\[\vecs T\,'(s) = \kappa\vecs N(s).\label{eq:curvature}\]
Ми вже знали, що\(\vecs T\,'(s)\) знаходиться в тому ж напрямку, що і\(\vecs N(s)\); тобто ми можемо думати про те\(\vecs T(s)\), що «витягується» у напрямку\(\vecs N(s)\). Наскільки «важко» його тягнуть? За фактором\(\kappa\). Коли кривизна велика,\(\vecs T(s)\) то «тягне важко» і напрямок швидко\(\vecs T(s)\) змінюється. Коли\(\kappa\) маленький, не тягне\(T(s)\) сильно і, отже, його напрямок не змінюється швидко.
Ми використовуємо Definition,\(\PageIndex{1}\) щоб знайти кривизну лінії в прикладі\(\PageIndex{2}\).
Приклад\(\PageIndex{2}\): Finding the curvature of a line
Використовуйте Definition,\(\PageIndex{1}\) щоб знайти кривизну\(\vecs r (t) = \langle 3t-1,4t+2\rangle\).
Рішення
У прикладі\ ref {ex_vvfarc1} ми виявили, що параметр довжини дуги був визначений таким чином\(\vecs r(s) =\langle 3t/5-1, 4t/5+2\rangle\) параметризований\(\vecs r\) параметром довжини дуги.\(s=5t\) Щоб знайти\(\kappa\), нам потрібно знайти\(\vecs T\,'(s)\).
\[\begin{align*} \vecs T(s) &= \vecs r ^\prime(s)\quad \text{(recall this is a unit vector)}\\[4pt]&= \langle 3/5, 4/5\rangle.\end{align*}\]
Тому
\[\vecs T\,'(s) = \langle 0,0\rangle \nonumber\]
і
\[\kappa=\norm{\vecs T\,'(s)} = 0. \nonumber\]
Ймовірно, не дивно, що кривизна лінії дорівнює 0. (Як «пишна» лінія? Це зовсім не пишні.)
Хоча визначення кривизни є прекрасним математичним поняттям, майже неможливо використовувати більшу частину часу; писати з\(\vecs r\) точки зору параметра довжини дуги, як правило, дуже важко. На щастя, існують і інші методи обчислення цієї величини, які набагато простіше. Існує компроміс: визначення «легко» зрозуміти, хоча важко обчислити, тоді як ці інші формули легко обчислити, хоча це може бути важко зрозуміти, чому вони працюють.
теорема 100: Формули для кривизни
\(C\)Дозволяти бути плавна крива на відкритому інтервалі\(I\) в площині або в просторі.
- Якщо\(C\) визначається шляхом\(y=f(x)\), то\[\kappa = \dfrac{|f^{\prime\prime}(x)|}{\Big(1+\big(f^\prime (x)\big)^2\Big)^{3/2}}.\]
- Якщо\(C\) визначається як векторно-значна функція в площині\(\vecs r(t) = \langle x(t), y(t)\rangle\), то\[\kappa = \dfrac{|x^\prime y^{\prime\prime}-x^{\prime\prime}y^{\prime} |}{\big((x^\prime )^2+(y^{\prime} )^2\big)^{3/2}}.\]
- Якщо\(C\) визначається в просторі векторно-значною функцією\(\vecs r(t)\), то\[\kappa = \dfrac{\norm{\vecs T\,'(t)}}{\norm{\vecs r^\prime(t)}} = \dfrac{\norm{\vecs r^\prime(t)\times\vecs r^{\prime\prime}(t)}}{\norm{\vecs r^\prime(t)}^3} = \dfrac{\vecs a(t)\cdot \vecs N(t)}{\norm{\vecs v(t)}^2}.\]
Практикуємо використання цих формул.
Приклад\(\PageIndex{3}\): Finding the curvature of a circle
Знайти кривизну окружності з радіусом\(r\), визначеним\(\vecs c(t) = \langle r\cos t,r\sin t\rangle\).
Рішення
Перш ніж почати, слід очікувати, що кривизна кола буде постійною, а не залежною від\(t\). (Чому?)
Обчислюємо за\(\kappa\) допомогою другої частини Теореми 100.
\ [\ почати {вирівнювати*}
\ каппа &=\ dfrac {| (-r\ sin t) (-r\ sin t) - (-r\ cos t) (r\ cos t) |} {\ big (-r\ sin t) ^2+ (r\ cos t) ^ {3/2}}\\ [4pt]
&=\ dfrac {r^2 (\ sin^2t+\ cos^2t)} {\ великий (r^2 (\ sin^2t+\ cos^2t)\ великий) ^ {3/2}}\\ [4пт]
&=\ dfrac {r^2} {r^3} =\ dfrac1r.
\ end {вирівнювати*}\]
Ми виявили, що коло з радіусом\(r\) має кривизну\(\kappa = 1/r\).
Приклад\(\PageIndex{3}\) дає відмінний результат. Перед цим прикладом, якби нам сказали: «Крива має кривизну 5 в точці»\(A\), ми б не мали уявлення, що це насправді означало. Чи 5 «великий» - чи відповідає дійсно різкий поворот, або не дуже різкий поворот? Тепер ми можемо думати про 5 через коло з радіусом 1/5. Знання одиниць (дюйми проти миль, наприклад) дозволяє нам визначити, наскільки різко крива викривляється.
Нехай точка\(P\) на гладкій кривій\(C\) буде задана, і\(\kappa\) нехай кривизна кривої в\(P\). Коло, яке:
- проходить наскрізь\(P\),
- лежить на увігнутій стороні\(C\),
- має загальну дотичну лінію, як\(C\) at\(P\) і
- має радіус\(r=1/\kappa\) (отже, має кривизну\(\kappa\))
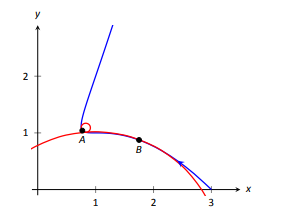
це оскулюючий коло, або коло кривизни, до\(C\) at\(P\), і\(r\) є радіусом кривизни. На малюнку\(\PageIndex{4}\) показаний графік кривої, показаний раніше на малюнку 11.30, і її оскулюючі кола при\(A\) і\(B\). Різкий поворот відповідає окружності з малим радіусом; поступовий поворот відповідає окружності з великим радіусом. Вміти думати про кривизну з точки зору радіуса кола дуже корисно.
Приклад\(\PageIndex{4}\): Finding curvature
Знайти кривизну параболи,\(y=x^2\) визначену у вершині і в\(x=1\).
Рішення
Використовуємо першу формулу, знайдену в теоремі 100.
\ [\ почати {вирівнювати*}
\ каппа (x) &=\ dfrac {|2|} {\ великий (1+ (2x) ^2\ великий) ^ {3/2}}\\ [4pt]
&=\ dfrac2 {\ великий (1+4x^2\ великий) ^ {3/2}}.
\ end {вирівнювати*}\]
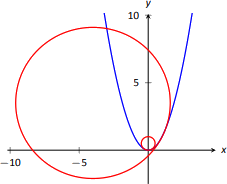
На вершині (\(x=0\)) кривизна є\(\kappa = 2\). В\(x=1\), кривизна є\(\kappa = 2/(5)^{3/2} \approx 0.179.\) Таким чином\(x=0\), кривизна\(y=x^2\) - це окружність радіуса\(1/2\); в\(x=1\), кривизна - це коло з радіусом\(\approx 1/0.179 \approx 5.59\). Це проілюстровано на малюнку\(\PageIndex{5}\). В\(x=3\), кривизна є\(0.009\); графік майже прямий, оскільки кривизна дуже близька до 0.
Приклад\(\PageIndex{5}\): Finding curvature
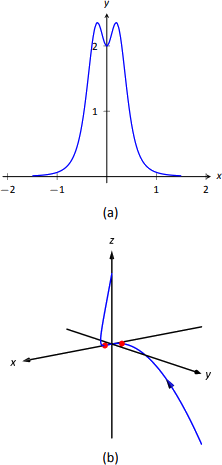
Знайдіть, де кривизна\(\vecs r(t) = \langle t, t^2, 2t^3\rangle \) максимізована.
Розв'язок Ми використовуємо третю формулу в теоремі 100\(\vecs r (t)\) як визначено в просторі. Ми залишаємо це читачеві, щоб переконатися, що
\[\vecs r ^\prime(t) =\langle 1,2t,6t^2\rangle,\quad \vecs r^{\prime\prime}(t) = \langle 0,2,12t\rangle,\quad \text{and}\quad \vecs r ^\prime(t)\times \vecs r^{\prime\prime}(t) = \langle 12t^2,-12t,2\rangle.\]
Таким чином
\ [\ почати {вирівнювати*}
\ каппа (t) &=\ dfrac {\ норма {\ векс r ^\ прайм (t)\ час\ векс r^ {\ прайм\ прайм} (t)}} {\ norm {\ vecs r ^\ прайм (t)} ^3}\ [4pt]
&=\ dfrac {\ норма {\ langle 12^t2, -12t,2\ діапазон}} {\ норма {\ кут 1,2t^2\ діапазон} ^3}\ [4pt]
&=\ dfrac {\ sqrt {144t^4+144t^2+4}} {\ ліворуч (\ sqrt {1+4t^2+36t^4\}\ праворуч) ^3}
\ end {align*}\]
Хоча це не особливо «приємна» формула, вона явно говорить нам, що кривизна при заданому\(t\) значенні. Щоб максимізувати\(\kappa(t)\), ми повинні вирішити\(\kappa'(t)=0\) для\(t\). Це здійсненне, але дуже трудомістке. Замість цього розглянемо графік,\(\kappa(t)\) як наведено на малюнку\(\PageIndex{6a}\). Ми бачимо, що\(\kappa\) максимізується при двох\(t\) значеннях; використовуючи числовий розв'язувач, ми знаходимо ці значення є\(t\approx\pm 0.189\). На малюнку\(\PageIndex{1b}\) ми графуємо\(\vecs r (t)\) і вказуємо точки, де кривизна максимізована.
Кривизна і рух
\(\vecs r(t)\)Дозволяти функція положення об'єкта, зі швидкістю\(\vecs v (t) = \vecs r ^\prime(t)\) і прискоренням\(\vecs a(t)=\vecs r^{\prime\prime}(t)\). У розділі 11.4 ми встановили, що прискорення знаходиться в площині,\(\vecs T(t)\) утвореній і\(\vecs N(t)\), і що ми можемо знайти скаляри\(a_\text{T}\) і\(a_\text{N}\) такі, що
\[\vecs a (t) = a_\text{T}\vecs T(t) + a_\text{N}\vecs N(t).\]
Теорема 98 дає формули для\(a_\text{T}\) і\(a_\text{N}\):
\[a_\text{T} = \dfrac{d}{dt}\Big(\norm{\vecs v (t) }\Big) \quad \text{and} \quad a_\text{N} = \dfrac{\norm{\vecs v (t) \times \vecs a (t) }}{\norm{\vecs v (t) }}.\]
Ми зрозуміли, що величина прискорення в напрямку\(\vecs T\) відноситься тільки до того, як змінюється швидкість об'єкта, і що величина прискорення в напрямку на\(\vecs N\) відноситься до того, як змінюється напрямок руху об'єкта. (Тобто, якщо об'єкт рухається з постійною швидкістю\(a_\text{T}=0\); якщо об'єкт рухається в постійному напрямку,\(a_\text{N}=0\).)
У Рівнянні\ ref {eq:vvfarc3} на початку цього розділу ми знайшли\(s\,'(t) = \norm{\vecs v (t) }\). Ми можемо поєднати цей факт з вищевказаною формулою\(a_\text{T}\) для запису
\[a_\text{T} = \dfrac{d}{dt}\Big(\norm{\vecs v (t) }\Big) = \dfrac{d}{dt}\big( s\,'(t)\big) = s\,''(t).\]
Оскільки\(s\,'(t)\) це швидкість,\(s\,''(t)\) це швидкість, з якою швидкість змінюється по відношенню до часу. Ми бачимо ще раз, що складова прискорення в напрямку руху відноситься тільки до швидкості, а не до зміни напрямку.
Тепер порівняйте формулу для\(a_\text{N}\) вище з формулою кривизни в теоремі 100:
\[a_\text{N} = \dfrac{\norm{\vecs v (t) \times \vecs a (t) }}{\norm{\vecs v (t) }}\quad \text{and}\quad \kappa = \dfrac{\norm{\vecs r ^\prime(t)\times\vecs r^{\prime\prime}(t)}}{\norm{\vecs r ^\prime(t)}^3}=\dfrac{\norm{\vecs v (t) \times \vecs a (t) }}{\norm{\vecs v (t) }^3} .\]
Таким чином
\ [\ почати {вирівняти}
a_\ текст {N} &=\ каппа\ норма {\ vecs v (t)} ^2\ мітка {eq:curvature_an}\\ [4pt]
&=\ каппа\ Великий (s\, '(t)\ Великий) ^2\ nonumber
\ end {вирівнювання}\]
Це останнє рівняння показує, що компонент прискорення, який змінює напрямок об'єкта, залежить від двох речей: кривизни шляху та швидкості об'єкта.
Уявіть собі водіння автомобіля по колу годинникової стрілки. Ви, природно, відчуєте силу, що штовхає вас до дверей (точніше, двері штовхають вас, коли машина повертається, і ви хочете подорожувати по прямій лінії). Якщо ви тримаєте радіус кола постійним, але прискорюєте (тобто збільшуєте\(s\,'(t)\)), двері сильніше штовхається проти вас (\(a_\text{N}\)збільшилася). Якщо ви тримаєте свою швидкість постійною, але затягнете поворот (тобто збільшуєте\(\kappa\)), знову двері буде сильніше штовхнути проти вас.
Збираючи наші нові формули для\(a_\text{T}\) та\(a_\text{N}\) разом, ми маємо
\[\vecs a (t) = s\,''(t)\vecs T(t) + \kappa\norm{\vecs v (t) }^2\vecs N(t).\]
Це не особливо практичний спосіб пошуку\(a_\text{T}\) і\(a_\text{N}\), але він розкриває деякі чудові поняття про те, як прискорення взаємодіє зі швидкістю та формою кривої.
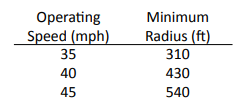
Приклад\(\PageIndex{6}\): Curvature and road design
Мінімальний радіус кривої конюшини в шосе визначається робочою швидкістю, як наведено в таблиці на рис\(\PageIndex{7}\). Для кожної кривої і швидкості обчислюйте\(a_\text{N}\).
Рішення
Використовуючи Equation\ ref {eq:curvature_an}, ми можемо обчислити прискорення нормаль до кривої в кожному випадку. Ми починаємо з перетворення кожної швидкості з «миль на годину» в «фути в секунду» шляхом множення на\(5280/3600\).
\ [\ почати {вирівнювати*}
\ текст {35 миль/год, 310 футів} &\ Стрілка вправо 51.33\ текст {ft/s},\ квад\ каппа = 1/310\\ [4pt]
a_\ текст {N} &=\ каппа\\\ норма {\ vecs v (t)} ^2\\ [4pt] &=\ dfrac1 {310}\ norm {\ vecs v (t)} ^2\\ [4pt]
&=\ dfrac1 {310}\ великий (51.1 33\ великий) ^2\\ [4pt]
&= 8.50\ текст {ft/s} ^2.
\ end {вирівнювати*}\]
\ [\ почати {вирівнювати*}
\ текст {40 миль/год, 430 футів} &\ Стрілка вправо 58.67\ текст {ft/s},\ квад\ каппа = 1/430\\ [4pt]
a_\ текст {N} &=\ dfrac1 {430}\ великий (58.67\ великий) ^2\\ [4pt]
&= 8.00\ текст {ft/s} ^2.
\ end {вирівнювати*}\]
\ [\ почати {вирівнювати*}
\ текст {45mph,540ft} &\ Стрілка вправо 66\ текст {ft/s},\ квад\ каппа = 1/540\\ [4pt]
a_\ текст {N} &=\ dfrac1 {540}\ великий (66\ великий) ^2\ [4pt]
&= 8.07\ текст {ft/s} ^2.
\ end {вирівнювати*}\]
Зверніть увагу, що кожне прискорення схоже; це за конструкцією. З огляду на класичну формулу «\(\times\)Прискорення сили\(=\) масового прискорення», це прискорення необхідно тримати невеликим, щоб шини транспортного засобу тримали «зчеплення» з дорогою. Якщо хтось подорожує на повороті радіуса 310 футів зі швидкістю 50 км/год, прискорення подвійне, на 17.35 футів/с\(^2\). Якщо розгін занадто високий, сили тертя, створюваної шинами, може виявитися недостатньо, щоб утримати автомобіль від ковзання. Інженери-будівельники регулярно обчислюють «безпечну» проектну швидкість, а потім віднімають 5-10mph, щоб створити розміщене обмеження швидкості для додаткової безпеки.
Ми закінчуємо цю главу роздумом про те, що ми охопили. Ми почали з векторно-значних функцій, які, можливо, здавалися в той час просто ще одним способом написання параметричних рівнянь. Однак ми бачили, що векторна перспектива дала нам велике уявлення про поведінку функцій та вивчення руху. Векторно-значні функції положення передають інформацію про переміщення, пройдену відстань, швидкість, швидкість, прискорення і кривизну, кожна з яких має велике значення в науці та техніці.