11.4: Одиничний тангенс і нормальний вектори
- Page ID
- 60686

Одиниця тангенс вектор
З огляду на гладку векторно-значну функцію\(\vecs r(t)\), ми визначили у Визначенні 71, що будь-який паралельний вектору\(\vecs r^\prime(t_0)\) є дотичним до графа\(\vecs r (t)\) at\(t=t_0\). Часто корисно враховувати саме напрямок,\(\vecs r^\prime(t)\) а не його величину. Тому нас цікавить одиничний вектор в сторону\(\vecs r^\prime(t)\). Це призводить до визначення.
Визначення\(\PageIndex{1}\): Unit Tangent Vector
\(\vecs r (t)\)Дозволяти гладкою функцією на відкритому інтервалі\(I\). Одиничний тангенс\(\vecs T(t)\) вектора
\[\vecs T(t) = \dfrac{1}{\norm{\vecs r^\prime(t)}}\vecs r^\prime(t).\]
Приклад\(\PageIndex{1}\): Computing the unit tangent vector
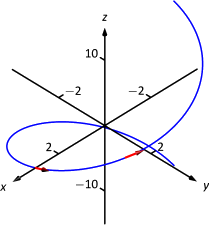
Нехай\(\vecs r (t) = \langle 3\cos t, 3\sin t, 4t\rangle\). Знайти\(\vecs T(t)\) і обчислити\(\vecs T(0)\) і\(\vecs T(1)\).
Рішення
Застосовуємо Визначення\(\PageIndex{1}\), щоб знайти\(\vecs T(t)\).
\ [\ почати {вирівнювати*}
\ векс T (t) &=\ dfrac {1} {\ норма {\ vecs r^\ прайм (t)}}\ векс r^\ правий (t)\\ [4pt]
&=\ dfrac {1} {\ sqrt {\ лівий (-3\ sin t\ праворуч) ^2+\ лівий (3\ cos t\ правий) ^2+\ лівий (3\ cos t\ правий) 2+ 4^2}}\ ланголь -3\ sin t,3\ cos t, 4\ діапазон\\ [4pt]
&=\ ланголь -\ dfrac35\ sin t,\ dfrac35\ cos t,\ dfrac 45\ діапазон.
\ end {вирівнювати*}\]
Тепер ми можемо легко обчислити\(\vecs T(0)\) і\(\vecs T(1)\):
\[\begin{align*} \vecs T(0) &= \langle 0,\dfrac35,\dfrac45\rangle\, \\[4pt] \vecs T(1) &= \langle -\dfrac35\sin 1,\dfrac35\cos 1,\dfrac45\rangle \approx \langle -0.505,0.324,0.8\rangle.\end{align*}\]
Вони побудовані на малюнку\(\PageIndex{1}\) з їх початковими точками в\(\vecs r(0)\) і\(\vecs r(1)\), відповідно. (Вони виглядають досить «короткими», оскільки вони мають лише довжину 1.)
Вектор дотичної одиниці\(\vecs T(t)\) завжди має величину 1, хоча іноді легко сумніватися, що це правда. Ми можемо допомогти зміцнити цю думку в нашій свідомості, обчислюючи\(\norm{\vecs T(1)}\):
\[\norm{\vecs T(1)} \approx \sqrt{(-0.505)^2+0.324^2+0.8^2} = 1.000001. \nonumber\]
Ми округлили в нашому обчисленні\(\vecs T(1)\), так що ми не отримуємо 1 точно. Ми залишаємо читачеві використовувати точне подання,\(\vecs T(1)\) щоб переконатися, що воно має довжину 1.
Багато в чому попередній приклад був «занадто приємним». Виявилося, що завжди\(\vecs r^\prime(t)\) була довжини 5. У наступному прикладі довжина змінна, залишаючи нам формулу, яка не така чиста.\(\vecs r^\prime(t)\)
Приклад\(\PageIndex{2}\): Computing the unit tangent vector
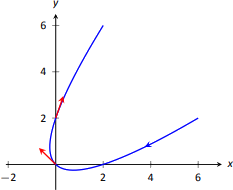
Нехай\(\vecs r (t)=\langle t^2-t,t^2+t\rangle\). Знайти\(\vecs T(t)\) і обчислити\(\vecs T(0)\) і\(\vecs T(1)\).
Рішення
Ми знаходимо\(\vecs r^\prime(t) = \langle 2t-1,2t+1\rangle\), і
\[\norm{\vecs r^\prime(t)} = \sqrt{(2t-1)^2+(2t+1)^2} = \sqrt{8t^2+2}.\]
Тому
\[\vecs T(t) = \dfrac{1}{\sqrt{8t^2+2}}\langle 2t-1,2t+1\rangle = \langle \dfrac{2t-1}{\sqrt{8t^2+2}},\dfrac{2t+1}{\sqrt{8t^2+2}}\rangle.\]
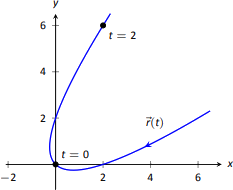
Коли\(t=0\), ми маємо\(\vecs T(0) = \langle -1/\sqrt{2},1/\sqrt{2}\rangle\); коли\(t=1\), ми маємо Ми\(\vecs T(1) = \langle 1/\sqrt{10}, 3/\sqrt{10}\rangle.\) залишаємо це читачеві, щоб переконатися, що кожен з них є одиничним вектором. Вони нанесені на рис\(\PageIndex{2}\).
Одиниця нормального вектора
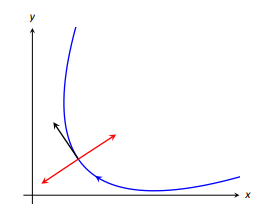
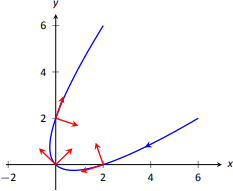
Подібно до того, як важливо знати напрямок дотичної до шляху, важливо знати напрямок, ортогональний до шляху. При роботі з реальними функціями ми визначили нормальну лінію в точці бути лінією через точку, яка була перпендикулярна дотичній лінії в цій точці. Ми можемо зробити подібну річ з векторно-значними функціями. Задано\(\vecs r (t)\) в\(\mathbb{R}^2\), ми маємо 2 напрямки, перпендикулярні дотичному вектору, як показано на малюнку\(\PageIndex{3}\). Добре задатися питанням: «Чи є один з цих двох напрямків кращим перед іншим?»
Задано\(\vecs r (t)\) в\(\mathbb{R}^3\), є нескінченні вектори, ортогональні дотичному вектору в заданій точці. Знову ж таки, ми можемо задатися питанням: «Чи є один з цих нескінченних варіантів кращим перед іншими? Чи є один з них «правильний» вибір?»
Відповідь в обох\(\mathbb{R}^2\) і\(\mathbb{R}^3\) є «Так, є один вектор, який є не тільки кращим, це «правильний» вибір». Нагадаємо Теорему 93, яка стверджує, що якщо\(\vecs r (t)\) має постійну довжину,\(\vecs r (t)\) то\(\vecs r^\prime(t)\) ортогональна для всіх\(t\). Ми знаємо\(\vecs T(t)\), що одиничний тангенс вектор, має постійну довжину. Тому\(\vecs T(t)\) є ортогональним до\(\vecs T\,'(t)\).
Ми побачимо, що\(\vecs T\,'(t)\) це більше, ніж просто зручний вибір вектора, який ортогональний\(\vecs r^\prime(t)\); скоріше, це «правильний» вибір. Оскільки все, що нас хвилює, - це напрямок, ми визначаємо цей щойно знайдений вектор як одиничний вектор.
Примітка:\(\vecs T(t)\) це одиничний вектор, за визначенням. Це не означає, що\(\vecs T\,'(t)\) це також одиничний вектор.
Визначення\(\PageIndex{2}\): Unit Normal Vector
\(\vecs r (t)\)Дозволяти векторно-значна функція, де дотичний вектор одиниці\(\vecs T(t)\), гладкий на відкритому інтервалі\(I\). Одиничний\(\vecs N(t)\) нормальний вектор
\[\vecs N(t) = \dfrac1{\norm{\vecs T\,'(t)}}\vecs T\,'(t).\]
Приклад\(\PageIndex{3}\): Computing the unit normal vector
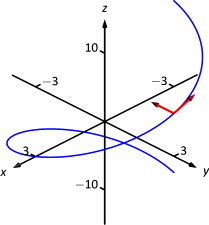
Нехай\(\vecs r (t) = \langle 3\cos t, 3\sin t, 4t\rangle\) як у прикладі 11.4.1. Намалюйте обидва\(\vecs T(\pi/2)\) і\(\vecs N(\pi/2)\) з початковими точками на\(\vecs r(\pi/2)\).
Рішення
У\(\PageIndex{1}\) прикладі ми знайшли\(\vecs T(t) = \langle (-3/5)\sin t,(3/5)\cos t,4/5\rangle\). Тому
\[\vecs T\,'(t) = \langle -\dfrac35\cos t,-\dfrac35\sin t,0\rangle\quad \text{and} \quad \norm{\vecs T\,'(t)} = \dfrac35.\]
Таким чином
\[\vecs N(t) = \dfrac{\vecs T\,'(t)}{3/5} = \langle -\cos t,-\sin t,0\rangle.\]
Обчислюємо\(\vecs T(\pi/2) = \langle -3/5,0,4/5\rangle\) і\(\vecs N(\pi/2) = \langle 0,-1,0\rangle\). Вони намальовані на малюнку\(\PageIndex{4}\).
Попередній приклад знову був «занадто приємним». Загалом, вираз for\(\vecs T(t)\) містить частки квадратних коренів, отже, вираз\(\vecs T\,'(t)\) дуже безладно. Ми демонструємо це в наступному прикладі.
Приклад\(\PageIndex{4}\): Computing the unit normal vector
Нехай\(\vecs r (t)=\langle t^2-t,t^2+t\rangle\) як у прикладі\(\PageIndex{2}\). Знайдіть\(\vecs N(t)\) і намалюйте\(\vecs r (t)\) з одиничними дотичними і нормальними векторами в\(t=-1,0\) і 1.
Рішення
У\(\PageIndex{2}\) прикладі ми знайшли
\[\vecs T(t) = \langle \dfrac{2t-1}{\sqrt{8t^2+2}},\dfrac{2t+1}{\sqrt{8t^2+2}}\rangle.\]
Пошук\(\vecs T\,'(t)\) вимагає двох застосувань правила частки:
\ [\ почати {вирівнювати*}
T (t) &=\ ланголь\ dfrac {\ sqrt {8t^2+2} (2) - (2t-1)\ ліворуч (\ dfrac12 (8t^2+2) ^ {-1/2} (16t)\ праворуч)} {8t^2+2},\\ [4pt]
&\ quad\ dfrac {\ sqrt 8t^2+2} (2) - (2т+1)\ ліворуч (\ dfrac12 (8t^2+2) ^ {-1/2} (16t)\ праворуч)} {8t^2+2}\ діапазон\\ [4pt]
&=\ кут\ dfrac {4 (2 t+1)} {\ ліворуч (8 t^2+2\ праворуч) ^ {3/2}},\ dfrac {4 (1-2 т)} {\ ліворуч (8 t^2+2\ праворуч) ^ {3/2}}\ діапазон
\ end {align*}\]
Це не одиничний вектор; щоб знайти\(\vecs N(t)\), нам потрібно розділити\(\vecs T\,'(t)\) на його величину.
\ [\ почати {вирівнювати*}
\ норма {\ векс Т\, '(t)} &=\ sqrt {\ dfrac {16 (2т+1) ^2} {(8т^2+2) ^3} +\ dfrac {16 (1-2t) ^2} {(8t^2+2) ^3}}\ [4pt]
&=\ sqrt {\ dфракція {16 (8t^2+2)} {(8t^2+2) ^3}}\\ [4pt]
&=\ dfrac {4} {8t^2+2}.
\ end {вирівнювати*}\]
Нарешті,
\ [\ почати {вирівнювати*}
\ векс N (t) &=\ dfrac1 {4/ (8t^2+2)}\ кут\ dfrac {4 (2 t+1)} {\ лівий (8 t^2+2\ праворуч) ^ {3/2}},\ dfrac {4
(1-2 т)} {\ лівий (8 t^2+2\ праворуч) ^ {3/2}}\ діапазон\\ [4pt]
&=\ кут\ dfrac {2t+1} {\ sqrt {8t^2+2}}, -\ dfrac {2t-1} {\ sqrt {8t^2+2}}\ діапазон.
\ end {вирівнювати*}\]
Використовуючи цю формулу для\(\vecs N(t)\), обчислюємо одиничний тангенс і нормальний вектори для\(t=-1,0\) і 1 і намалюємо їх на рис\(\PageIndex{5}\).
Кінцевий результат для\(\vecs N(t)\) в Приклад\(\PageIndex{4}\) підозріло схожий на\(\vecs T(t)\). Для цього є чітка причина. Якщо\(\vecs u = \langle u_1,u_2\rangle \) є одиничним вектором в\(\mathbb{R}^2\), то єдиними одиничними векторами,\(\vecs u\) ортогональними є\(\langle -u_2,u_1\rangle \) і\(\langle u_2,-u_1\rangle\). З огляду на\(\vecs T(t)\), ми можемо швидко визначити,\(\vecs N(t)\) чи знаємо ми, на який термін помножити\((-1)\).
Розглянемо ще раз малюнок 11.24, де ми побудували деякі одиничні дотичні і нормальні вектори. Зверніть увагу, як\(\vecs N(t)\) завжди вказує «всередині» кривої, або на увігнуту сторону кривої. Це не випадковість, це вірно в цілому. Знання напрямку, яке\(\vecs r(t)\) «повертає», дозволяє нам швидко знайти\(\vecs N(t)\).
ТЕОРЕМА\(\PageIndex{1}\): Unit Normal Vectors in \(\mathbb{R}^2\)
\(\vecs r(t)\)Дозволяти векторної функції в\(\mathbb{R}^2\) де\(\vecs T\,'(t)\) є гладкою на відкритому інтервалі\(I\). Дозвольте\(t_0\) бути в,\(I\) а\(\vecs T(t_0) = \langle t_1,t_2\rangle\) потім\(\vecs N(t_0)\) є або
\[\vecs N(t_0) = \langle -t_2,t_1\rangle \quad \text{or}\quad \vecs N(t_0) = \langle t_2,-t_1\rangle,\]
залежно від того, що є вектором, який вказує на увігнуту сторону графа\(\vecs r\).
Додаток до прискорення
\(\vecs r (t)\)Дозволяти функція положення. Це факт (викладено пізніше в теоремі\(\PageIndex{2}\)), що прискорення,\ vecs a (t), лежить в площині, визначеній\(\vecs T\) і\(\vecs N\). Тобто існують скаляри\(a_{\text{T}}\) і\(a_{\text{N}}\) такі, що
\[\vecs a (t) = a_{\text{T}}\vecs T(t) + a_{\text{N}}\vecs N(t).\]
Скаляр\(a_{\text{T}}\) вимірює «скільки» прискорення в напрямку руху, тобто вимірює складову прискорення, що впливає на швидкість. Скаляр\(a_{\text{N}}\) вимірює «скільки» прискорення перпендикулярно напрямку руху, тобто вимірює складову прискорення, що впливає на напрямок руху.
Ми можемо знайти,\(a_{\text{T}}\) використовуючи ортогональну проекцію\(\vecs a(t)\) onto\(\vecs T(t)\) (огляд Визначення 59 в розділі 10.3, якщо це необхідно).
Згадуючи, що так як\(\vecs T(t)\) є одиничним вектором\(\vecs T(t)\cdot\vecs T(t)=1\), тому ми маємо
\[\text{proj}_{T(t)}\vecs a(t) = \dfrac{\vecs a(t)\cdot\vecs T(t)}{\vecs T(t)\cdot\vecs T(t)}\vecs T(t) = \underbrace{\left(\vecs a(t)\cdot\vecs T(t)\right) }_{a_{\text{T}}}\vecs T(t).\]
Таким чином, сума\(\vecs a (t)\) в напрямку\(\vecs T(t)\) є\(a_{\text{T}}=\vecs a (t)\cdot\vecs T(t)\). Та ж логіка дає\(a_{\text{N}} = \vecs a (t)\cdot\vecs N(t)\).
Хоча це прекрасний спосіб обчислення\(a_{\text{T}}\), існують простіші способи пошуку\(a_{\text{N}}\) (оскільки пошук\(\vecs N\) себе може бути складним). Наступна теорема дає альтернативні формули для\(a_{\text{T}}\) і\(a_{\text{N}}\).
Примітка: Майте на увазі, що обидва\(a_\text{T}\) і\(a_\text{N}\) є функціями\(t\); тобто скалярні зміни в залежності від\(t\). Це умовність відкинути позначення\((t)\) ""\(a_\text{T}(t)\) і просто написати\(a_\text{T}\).
ТЕОРЕМА\(\PageIndex{2}\): Acceleration in the Plane Defined by \(\vecs T\) and \(\vecs N\)
\(\vecs r (t)\)Дозволяти позиційна функція з прискорення\(\vecs a (t)\) і одиниці тангенса і нормальних векторів\(\vecs T(t)\) і\(\vecs N(t)\). Потім\(\vecs a (t)\) лежить в площині,\(\vecs T(t)\) визначеній і\(\vecs N(t)\); тобто існують скаляри\(a_\text{T}\) і\(a_\text{N}\) такі, що
\[\vecs a (t) = a_\text{T}\vecs T(t) + a_\text{N}\vecs N(t).\]
Більш того,
\ [\ почати {вирівнювати*}
a_\ текст {T} &=\ векс a (t)\ cdot\ vecs T (t) =\ dfrac {d} {dt}\ лівий (\ норма {\ vecs v (t)}\ вправо)\\ [4pt]
a_\ текст {N} &=\ vecs a (t)\ cdot\ vecs N (t) =\ sqrt {\ норма {\ vecs a (t)} ^2-a_\ текст {T} ^2} =\ dfrac {\ norm {\ vecs a (t)\ times\ vecs v (t)}} {\ norm {\ vecs v (t)} =\ норма {\ vecs v (t)}\,\ норма {\ vecs T\, '(t)}
\ end {align*}\]
Зверніть увагу на другу формулу для\(a_\text{T}\):\( \dfrac{d}{dt}\left(\norm{\vecs v (t)}\right) \). Це вимірює швидкість зміни швидкості, яка знову-таки є величиною прискорення в напрямку руху.
Приклад\(\PageIndex{5}\): Computing \(a_\text{T}\) and \(a_\text{N}\)
Нехай\(\vecs r (t) = \langle 3\cos t, 3\sin t, 4t\rangle\) як у прикладах 11.4.1 і 11.4.3. Знайти\(a_\text{T}\) і\(a_\text{N}\).
Рішення
Попередні приклади наводимо\(\vecs a (t) = \langle -3\cos t,-3\sin t,0\rangle\) і
\[\vecs T(t) = \langle -\dfrac35\sin t,\dfrac35\cos t,\dfrac45\rangle \quad \text{and}\quad \vecs N(t) = \langle -\cos t,-\sin t,0\rangle.\]
Ми можемо знайти\(a_\text{T}\) та\(a_\text{N}\) безпосередньо з точковими продуктами:
\ [\ почати {вирівнювати*}
a_\ текст {T} &=\ векс а (т)\ cdot\ векс T (t) =\ dfrac95\ cos t\ dfrac95\ cos t\ sin t+0 = 0.\\ [4pt]
a_\ text {N} &=\ vecs a (t)\ cdot\ vecs N (t) = 3\ cos^2t+3\ sin^2t + 0 = 3.
\ end {вирівнювати*}\]
Таким чином\(\vecs a (t) = 0\vecs T(t) + 3\vecs N(t) = 3\vecs N(t)\), що явно так.
Яке практичне тлумачення цих чисел? \(a_\text{T}=0\)означає, що об'єкт рухається з постійною швидкістю, а значить, все прискорення відбувається у вигляді зміни напрямку.
Приклад\(\PageIndex{6}\): Computing \(a_\text{T}\) and \(a_\text{N}\)
Нехай\(\vecs r (t)=\langle t^2-t,t^2+t\rangle\) як в прикладах\(\PageIndex{2}\) і\(\PageIndex{4}\). Знайти\(a_\text{T}\) і\(a_\text{N}\).
Рішення
Попередні приклади наводимо\(\vecs a(t) = \langle 2,2\rangle\) і
\[\vecs T(t) = \langle \dfrac{2t-1}{\sqrt{8t^2+2}},\dfrac{2t+1}{\sqrt{8t^2+2}}\rangle \nonumber\]
і
\[ \vecs N(t) = \langle \dfrac{2t+1}{\sqrt{8t^2+2}},-\dfrac{2t-1}{\sqrt{8t^2+2}}\rangle. \nonumber\]
Хоча ми можемо обчислювати\(\vecs N(t)\),\(a_\text{N}\) використовуючи, ми замість цього демонструємо, використовуючи іншу формулу з теореми\(\PageIndex{2}\).
\ [\ почати {вирівнювати*}
a_\ текст {T} &=\ векс а (т)\ cdot\ векс T (t) =\ dfrac {4t-2} {\ sqrt {8t^2+2}} +\ dfrac {4t+2} {\ sqrt {8t^2+2}} =\ dfrac {8t} {\ sqrt {8t} ^2+2}}.\\ [4pt]
a_\ текст {N} &=\ sqrt {\ норма {\ vecs a (t)} ^2-a_\ текст {T} ^2} =\ sqrt {8-\ ліворуч (\ dfrac {8t} {8t^2+2}}\ праворуч) ^2} =\ dfrac {4} {квадратний {8 t^2+2}}
\ end {вирівнювати*}\]
Коли\(t=2\),\( a_\text{T} = \dfrac{16}{\sqrt{34}}\approx 2.74\) і\( a_\text{N} = \dfrac{4}{\sqrt{34}} \approx 0.69\). Ми інтерпретуємо це так, щоб означати\(t=2\), що частинка прискорюється здебільшого за рахунок збільшення швидкості, а не за рахунок зміни напрямку. Оскільки шлях поруч\(t=2\) є відносно прямим, це повинно мати інтуїтивний сенс. Рисунок\(\PageIndex{6}\) дає графік шляху для довідки.
Контрастуйте це з\(t=0\) тим, де\(a_\text{T} = 0\) і\(a_\text{N} = 4/\sqrt{2}\approx 2.82\). Тут швидкість частинки не змінюється і все прискорення відбувається у вигляді зміни напрямку.
Приклад\(\PageIndex{7}\): Analyzing projectile motion
М'яч кидається з висоти 240ft з початковою швидкістю 64ft/s і кутом підйому\(30^\circ\). Знайдіть функцію\(\vecs r (t)\) положення м'яча і проаналізуйте\(a_\text{T}\) і\(a_\text{N}\).
Рішення
За допомогою Key Idea 53 розділу 11.3 формуємо позиційну функцію м'яча:
\[\vecs r (t) = \langle \left(64\cos 30^\circ\right) t, -16t^2+\left(64\sin 30^\circ\right) t+240\rangle,\]
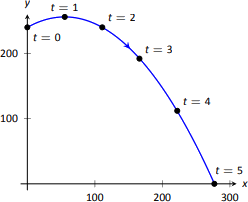
які ми збудуємо на рис\(\PageIndex{7}\).
З цього знаходимо\(\vecs v (t) = \langle 64\cos 30^\circ, -32t+64\sin 30^\circ\rangle\) і\(\vecs a (t) = \langle 0,-32\rangle\). Обчислення не\(\vecs T(t)\) складно, і з деяким спрощенням ми знаходимо
\[\vecs T(t) = \langle \dfrac{\sqrt{3}}{\sqrt{t^2-2t+4}}, \dfrac{1-t}{\sqrt{t^2-2t+4}}\rangle.\]
З\(\vecs a (t)\) таким же простим, як це є, знайти\(a_\text{T}\) також просто:
\[a_\text{T} = \vecs a (t)\cdot \vecs T(t) = \dfrac{32t-32}{\sqrt{t^2-2t+4}}.\]
Вибираємо не знайти\(\vecs N(t)\) і знаходимо\(a_\text{N}\) через формулу\(a_\text{N} = \sqrt{\norm{\vecs a (t)}^2-a_\text{T}^2\,}\):
\[a_\text{N} = \sqrt{32^2-\left(\dfrac{32t-32}{\sqrt{t^2-2t+4}}\right)^2} = \dfrac{32\sqrt{3}}{\sqrt{t^2-2t+4}}.\]
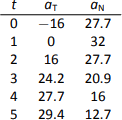
На малюнку\(\PageIndex{8}\) наведено таблицю значень\(a_\text{T}\) і\(a_\text{N}\). Коли\(t=0\), ми бачимо, що швидкість м'яча зменшується; коли\(t=1\) швидкість м'яча незмінна. Це відповідає тому, що\(t=1\) на кулі досягає своєї найвищої точки.
Після\(t=1\) ми бачимо, що\(a_\text{N}\) зменшується в ціні. Це пов'язано з тим, що коли м'яч падає, його шлях стає прямішим, і більша частина прискорення відбувається у вигляді прискорення м'яча, а не в зміні його напрямку.
Наше розуміння одиничного тангенса і нормальних векторів сприяє нашому розумінню руху. Робота в прикладі\(\PageIndex{7}\) дала кількісний аналіз того, що ми інтуїтивно знали.
Наступний розділ містить ще два важливі кроки на шляху до цього аналізу. Наразі ми описуємо позицію лише з точки зору часу. Однак у повсякденному житті ми часто описуємо положення з точки зору відстані («АЗС знаходиться приблизно на 2 милі попереду, зліва.»). Параметр довжини дуги дозволяє нам орієнтуватися на позицію з точки зору пройденої відстані.
Ми також інтуїтивно знаємо, що деякі шляхи пряміші за інші - а деякі «кривіші», ніж інші, але нам не вистачає вимірювання «кривизни». Параметр довжини дуги забезпечує нам спосіб обчислення кривизни, кількісного виміру того, наскільки крива крива.