11.3: Обчислення руху
- Page ID
- 60688

Загальним використанням векторно-значних функцій є опис руху об'єкта в площині або в просторі. Функція\(\vecs r(t)\) position дає позицію об'єкта в той час\(t\). У цьому розділі досліджується, як похідні та інтеграли використовуються для вивчення руху, описаного такою функцією.
Визначення 73: Швидкість, швидкість і прискорення
\(\vecs r(t)\)Дозволяти бути функція положення в\(\mathbb{R}^2\) або\(\mathbb{R}^3\).
- Швидкість, що позначається\(\vecs v(t)\), - це миттєва швидкість зміни положення; тобто
\[\vecs v(t) = \vecs r^\prime (t).\]
- Швидкість - це величина швидкості,
\[ \text{speed} = \norm{\vecs v(t)}.\]
- Прискорення\(\vecs a(t)\), що позначається, - це миттєва швидкість зміни швидкості; тобто
\[\vecs a(t) = \vecs v\,'(t) = \vecs r^{\prime\prime}(t).\]
Приклад\(\PageIndex{1}\): Finding velocity and acceleration
Об'єкт рухається з функцією положення\(\vecs r(t) = \langle t^2-t,t^2+t\rangle\)\(-3\leq t\leq 3\), де відстані вимірюються в футах, а час вимірюється в секундах.
- Знайти\(\vecs v (t)\) і\(\vecs a (t)\).
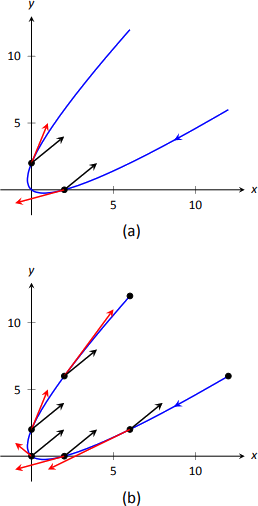
- Ескіз\(\vecs r (t)\); сюжет\(\vecs v(-1)\)\(\vecs a(-1)\),\(\vecs v(1)\) і\(\vecs a(1)\), кожен зі своєю початковою точкою у відповідній точці на графіку\(\vecs r (t)\).
- Коли швидкість об'єкта зводиться до мінімуму?
Рішення
- Взявши похідні, знаходимо\[\vecs v (t) = \vecs r^\prime (t) =\langle 2t-1,2t+1\rangle \nonumber\] і\[\quad \vecs a (t) = \vecs r^{\prime\prime}(t) = \langle 2,2\rangle. \nonumber\] відзначаємо, що прискорення постійне.
- \(\vecs v(-1) = \langle -3,-1\rangle\),\(\vecs a(-1) = \langle 2,2\rangle\);\(\vecs v(1) = \langle 1,3\rangle\),\(\vecs a(1) = \langle 2,2\rangle\). Вони позначені на\(\vecs r (t)\) малюнку\(\PageIndex{1a}\).
Ми можемо думати про прискорення як «витягування» вектора швидкості в певному напрямку. На\(t=-1\), вектор швидкості вказує вниз і вліво; в\(t=1\), вектор швидкості був витягнутий у\(\langle 2,2\rangle\) напрямку і тепер спрямований вгору і вправо. На малюнку 11.15 (b) ми будуємо більше векторів швидкість/прискорення, що робить більш зрозумілим вплив прискорення на швидкість.
Так\(\vecs a (t)\) як постійна в цьому прикладі, так як\(t\) зростає велика\(\vecs v (t)\) стає майже паралельно\(\vecs a (t)\). Наприклад, коли\(t=10\)\(\vecs v(10) = \langle 19,21\rangle\), що майже паралельно\(\langle 2,2\rangle\). - Швидкість об'єкта задається\[\norm{\vecs v (t)} = \sqrt{(2t-1)^2+(2t+1)^2} =\sqrt{8t^2+2}.\] Щоб знайти мінімальну швидкість, ми могли б застосувати методи обчислення (наприклад, встановити похідну рівну 0 і вирішити для тощо)\(t\), але ми можемо знайти її шляхом перевірки. Усередині квадратного кореня ми маємо квадратний, який мінімізується, коли\(t=0\). Таким чином, швидкість зводиться до мінімуму\(t=0\), зі швидкістю\(\sqrt{2}\) ft/s. графік
на малюнку\(\PageIndex{1b}\) також передбачає, що швидкість тут зведена до мінімуму. Заповнені точки на графіку розташовані в цілих значеннях\(t\) від\(-3\) 3 до 3. Точки, які знаходяться далеко один від одного, означають, що об'єкт пройшов велику відстань за 1 секунду, що вказує на високу швидкість; точки, які знаходяться близько один від одного, означають, що об'єкт не подорожував далеко за 1 секунду, що вказує на низьку швидкість. Точки розташовані найближче поруч\(t=0\), маючи на увазі, що швидкість зведена до мінімуму поблизу цього значення.
Приклад\(\PageIndex{2}\): Analyzing Motion
Два об'єкти йдуть однаковим шляхом з різною швидкістю далі\([-1,1]\). Функція положення для Object 1 є\(\vecs r_1(t) = \langle t, t^2\rangle\); функція положення для Object 2\(\vecs r_2(t) = \langle t^3, t^6\rangle\), де відстані вимірюються в футах, а час вимірюється в секундах. Порівняйте швидкість, швидкість і прискорення двох об'єктів на шляху.
Рішення
Почнемо з обчислення функції швидкості та прискорення для кожного об'єкта:
\ [\ begin {align*}
\ vecs v_1 (t) &=\ кут 1,2 т\ діапазон &\ векс v_2 (t) &=\ кут 3t^2,6t^5\ діапазон\\ [4pt]
\ vecs a_1 (t) &=\ кут 0,2\ діапазон &\ vecs a_2 (t) &=\ langle 6t ,30t^4\ діапазон
\ кінець {align*}\]
Ми відразу бачимо, що Object 1 має постійне прискорення, тоді як Object 2 - ні.
В\(t=-1\), ми маємо\(\vecs v_1(-1) = \langle 1,-2\rangle\) і\(\vecs v_2(-1) = \langle 3,-6\rangle\); швидкість об'єкта 2 втричі більше, ніж у Об'єкта 1, і тому випливає, що швидкість об'єкта 2 втричі більше, ніж у Об'єкта 1 (\(3\sqrt{5}\)ft/s порівняно з\(\sqrt{5}\) ft/s.)
При\(t=0\), швидкість об'єкта 1 є\(\vecs v(1) = \langle 1,0\rangle\) і швидкість об'єкта 2 є\(\vecs 0\)! Це говорить нам, що Об'єкт 2 приходить до повної зупинки\(t=0\).
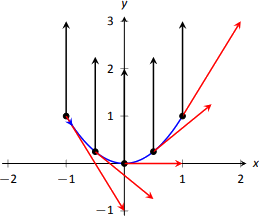
На малюнку\(\PageIndex{2}\) ми бачимо вектори швидкості та прискорення для Об'єкта 1, побудовані для\(t=-1, -1/2, 0, 1/2\) та\(t=1\). Зауважте ще раз, як вектор постійного прискорення, здається, «тягне» вектор швидкості від вказівки вниз, вправо вгору, вправо. Ми могли б побудувати аналогічну картину для Object 2, але вектори швидкості та прискорення досить великі (\(\vecs a_2(-1) = \langle -6,30\rangle\)!)
Замість цього ми просто будуємо розташування Об'єкта 1 та 2 на інтервалах секунди, показаних на малюнку\(\PageIndex{3a}\) та\(\PageIndex{3b}\).\(1/10^{\text{th}}\) Зверніть увагу, як\(x\) -значення Object 1 збільшуються з постійною швидкістю. Це пов'язано з тим, що\(x\) -компонент\(\vecs a(t)\) дорівнює 0; у\(x\) -компоненті немає прискорення. Точки розташовані не рівномірно; об'єкт рухається швидше поблизу\(t=-1\) і\(t=1\) поблизу\(t=0\).
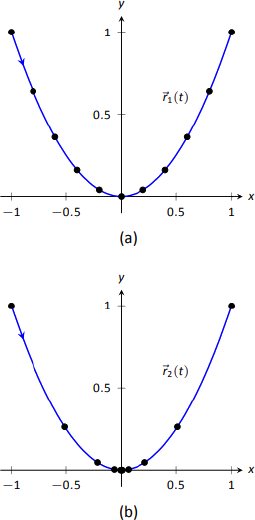
На малюнку ми бачимо точки\(\PageIndex{3b}\), нанесені для Об'єкта 2. Зверніть увагу на велику зміну положення від\(t=-1\) до\(t=-0.9\); об'єкт починає рухатися дуже швидко. Однак він значно сповільнюється у нього наближається до походження, і доходить до повної зупинки\(t=0\). Хоча схоже на те, що поблизу походження є 3 точки, насправді є 5 балів.
Оскільки об'єкти починаються і закінчуються в одному місці, вони мають однакове зміщення. Оскільки вони починаються і закінчуються одночасно, з однаковим зміщенням, вони мають однакову середню швидкість зміни (тобто мають однакову середню швидкість). Оскільки вони йдуть одним і тим же шляхом, у них однакова пройдена відстань. Незважаючи на те, що ці три вимірювання однакові, об'єкти, очевидно, подорожують шляхом дуже різними способами.
Приклад\(\PageIndex{3}\): Analyzing the motion of a whirling ball on a string
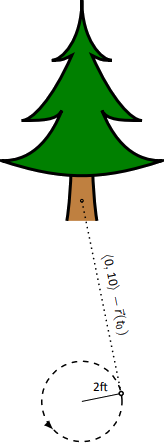
Молодий хлопчик кружляє м'яч, прикріплений до мотузки, над головою по колу проти годинникової стрілки. Куля йде по круговому шляху і робить 2 обороти в секунду. Рядок має довжину 2ft.
- Знайдіть функцію position\(\vecs r(t)\), яка описує цю ситуацію.
- Знайдіть прискорення м'яча і виведіть його фізичну інтерпретацію.
- Дерево стоїть 10 футів перед хлопчиком. При яких\(t\) -значеннях хлопчик повинен відпускати струну, щоб кулька потрапила в дерево?
Рішення
- Куля кружиться по колу. Оскільки струна довжиною 2 фути, радіус кола дорівнює 2. Функція\(\vecs r (t)= \langle 2\cos t, 2\sin t\rangle\) position описує коло з радіусом 2, центрований у початку, але робить повний оборот кожні\(2\pi\) секунди, а не два обороти в секунду. Ми модифікуємо період тригонометричних функцій на 1/2 множенням\(t\) на\(4\pi\). Кінцева функція положення є таким чином\[\vecs r (t) = \langle 2\cos (4\pi t), 2\sin (4\pi t)\rangle.\] (Покладіть це для того,\(0\leq t\leq 1/2\) щоб переконатися, що один оборот зроблений за 1/2 секунди.)
- Щоб знайти\(\vecs a (t)\), виводимо\(\vecs r (t)\) двічі. \[\begin{align*}\vecs v (t) = \vecs r^\prime (t) &= \langle -8\pi \sin (4\pi t), 8\pi \cos (4\pi t)\rangle\\[4pt] \vecs a (t) =\vecs r^{\prime\prime}(t) &= \langle -32\pi^2 \cos (4\pi t), -32\pi^2 \sin (4\pi t) \rangle \\[4pt]&= -32\pi^2\langle \cos (4\pi t), \sin (4\pi t)\rangle.\end{align*}\]
Зверніть увагу, як\(\vecs a (t)\) паралельно\(\vecs r (t)\), але має різну величину і вказує в протилежну сторону. Чому це?
Нагадаємо класичне рівняння фізики «\(\times\)Прискорення\(=\) маси сили». Сила, що діє на масу, індукує прискорення (тобто маса рухається); прискорення, що діє на масу, індукує силу (гравітація дає нашій масі вага). При цьому сила і прискорення тісно пов'язані між собою. Рухомий куля «хоче» подорожувати по прямій. Чому м'яч в нашому прикладі рухається по колу? Вона кріпиться до руки хлопчика мотузкою. Струна прикладає силу до м'яча, впливаючи на його рух: струна прискорює м'яч. Це не прискорення в сенсі «він подорожує швидше»; скоріше, це прискорення змінює швидкість м'яча. В якому напрямку застосовується ця сила/прискорення? У напрямку струни, у напрямку до руки хлопчика.
Величина прискорення пов'язана зі швидкістю, з якою рухається м'яч. Куля, що кружиться швидко, швидко змінює напрямк/швидкість. Коли швидкість швидко змінюється, прискорення повинно бути «великим».
- Коли хлопчик відпускає струну, струна більше не докладає сили до м'яча, тобто прискорення є\(\vecs 0\) і м'яч тепер може рухатися по прямій лінії в напрямку\(\vecs v(t)\).
Нехай\(t=t_0\) буде час, коли хлопчик відпускає струну. М'яч буде знаходитися при\(\vecs r(t_0)\), рухаючись у напрямку\(\vecs v(t_0)\). Ми хочемо знайти\(t_0\) так, щоб цей рядок містив точку\((0,10)\) (так як дерево 10 футів безпосередньо перед хлопчиком).
Існує багато способів знайти це значення часу. Ми вибираємо той, який є відносно простим обчислювальним шляхом. Як показано на малюнку\(\PageIndex{4}\), вектор від точки випуску до дерева є\(\langle 0,10\rangle - \vecs r(t_0)\). Цей відрізок лінії дотичний до кола, що означає, що він також перпендикулярний до\(\vecs r(t_0)\) себе, тому їх точковий добуток дорівнює 0. \[ \begin{align*}\vecs r(t_0) \cdot \big(\langle 0,10\rangle - \vecs r(t_0)\big) &=0\\[4pt] \langle 2\cos (4\pi t_0), 2\sin (4\pi t_0)\rangle \cdot \langle -2\cos(4\pi t_0),10-2\sin (4\pi t_0)\rangle &=0\\[4pt]-4\cos^2(4\pi t_0) + 20\sin (4\pi t_0)-4\sin^2(4\pi t_0) &= 0\\[4pt]20\sin (4\pi t_0) - 4 &=0\\[4pt] \sin (4\pi t_0) &=1/5\\[4pt]4\pi t_0 &= \sin^{-1}(1/5)\\[4pt]4\pi t_0 &\approx 0.2 + 2\pi n, \end{align*}\]де\(n\) - ціле число. Рішення для\(t_0\) нас є:\[t_0 \approx 0.016 + n/2\nonumber\] Це чудова формула. Кожні 1/2 секунди після\(t=0.016\) s хлопчик може звільнити струну (так як м'яч робить 2 обороти в секунду, у нього є два шанси кожну секунду випустити м'яч).
Приклад\(\PageIndex{4}\): Analyzing motion in space
Об'єкт рухається по спіралі з функцією положення\(\vecs r (t) = \langle \cos t, \sin t, t\rangle\), де відстані вимірюються в метрах, а час - у хвилинах. Опишіть швидкість і прискорення об'єкта в часі\(t\).
Рішення
С\(\vecs r (t) = \langle \cos t,\sin t, t\rangle\), у нас є:
\ [\ begin {align*}
\ vecs v (t) &=\ ланголь -\ sin t,\ cos t, 1\ rangle\ quad\ text {і}\\ [4pt]
\ vecs a (t) &=\ лангель -\ cos t, -\ sin t, 0\ діапазон.
\ end {вирівнювати*}\]
Швидкість об'єкта -\(\norm{\vecs v (t)} = \sqrt{(-\sin t)^2+\cos^2t+1} = \sqrt{2}\) м/хв; він рухається з постійною швидкістю. Зверніть увагу, що об'єкт не розганяється в\(z\) -напрямку, а навпаки рухається вгору з постійною швидкістю 1м/хв.
Об'єкти в прикладах 11.3.3 і 11.3.4 подорожували з постійною швидкістю. Тобто\(\norm{\vecs v (t)} = c\) для якоїсь постійної\(c\). Нагадаємо теорему 93, яка стверджує, що якщо векторно-значна функція\(\vecs r (t)\)\ має постійну довжину, то\(\vecs r (t)\)\ перпендикулярна її похідній:\(\vecs r (t)\cdot\vecs r^\prime (t) = 0\). У цих прикладах функція швидкості має постійну довжину, тому можна зробити висновок, що швидкість перпендикулярна прискоренню:\(\vecs v (t)cdot\vecs a (t) = 0\). Швидка перевірка підтверджує це.
Є інтуїтивне розуміння цього. Якщо прискорення паралельно швидкості, то воно впливає лише на швидкість об'єкта; воно не змінює напрямок руху. (Наприклад, розглянемо випав камінь. Прискорення і швидкість паралельні - прямо вниз - і напрямок швидкості ніколи не змінюється, хоча швидкість зростає.) Якщо прискорення не перпендикулярно швидкості, то відбувається деяке прискорення в напрямку руху, що впливає на швидкість. Якщо швидкість постійна, то прискорення має бути ортогональним швидкості, так як воно потім впливає тільки на напрямок, а не швидкість.
ключова ідея: 52 об'єкти з постійною швидкістю
Якщо об'єкт рухається з постійною швидкістю, то його вектори швидкості і прискорення ортогональні. Тобто,\(\vecs v (t)cdot\vecs a (t)=0\).
рух снаряда
Важливим застосуванням векторно-значних функцій положення є рух снаряда: рух об'єктів тільки під впливом сили тяжіння. Ми будемо вимірювати час в секундах, а відстані будуть або в метрах, або футах. Ми покажемо, що можемо повністю описати шлях такого об'єкта, знаючи його початкове положення і початкову швидкість (тобто, де він знаходиться і куди йде.)
Припустимо, об'єкт має початкове положення\(\vecs r(0) = \langle x_0,y_0\rangle\) і початкову швидкість\(\vecs v(0) = \langle v_x,v_y\rangle\). Прийнято переписувати\(\vecs v(0)\) в плані його швидкості\(v_0\) і напрямку\(\vecs u\), де\(\vecs u\) - одиничний вектор. Згадати всі одиничні вектори в\(\mathbb{R}^2\) можна записати як\(\langle \cos \theta,\sin \theta\rangle\), де\(\theta\) є міра кута проти годинникової стрілки від\(x\) -осі. (Ми називаємо\(\theta\) кутом піднесення.) Таким чином\(\vecs v(0) = v_0\langle \cos \theta,\sin \theta\rangle.\)
Оскільки відомо прискорення об'єкта, а саме\(\vecs a (t) = \langle 0,-g\rangle\), де\(g\) гравітаційна константа, ми можемо знайти\(\vecs r (t)\) знаючи дві наші початкові умови. Спочатку знаходимо\ (\ vecs v (t)):
Примітка
У цьому тексті ми використовуємо\(g=32\) ft/s при використанні імперських одиниць, і\(g=9.8\) м/с при використанні одиниць СІ.
\ [\ почати {вирівнювати*}
\ векс v (t) &=\ int\ vecs a (t) dt\\ [4pt]
\ vecs v (t) &=\ int\ langle 0, -g\ діапазон dt\\ [4pt]
\ vecs v (t) &=\ langle 0, -gt\ діапазон +\ vecs C
\ end {align*}\
Знаючи\(\vecs v(0) = v_0\langle \cos \theta,\sin \theta\rangle\), у нас\(\vecs C = v_0\langle \cos t,\sin t\rangle\) і так
\[\vecs v(t) = \langle v_0\cos \theta, -gt+v_0\sin\theta\rangle.\]
Ми інтегруємося ще раз, щоб знайти\(\vecs r (t)\):
\ [\ почати {align*}
\ векс r (t) &=\ int\ vecs v (t) dt\\\ [4pt]
\ vecs r (t) &=\ int\ ланкут v_0\ cos\ тета, -gt+v_0\ sin\ тета\ діапазон dt\\ [4pt]
\ vecs r (t) &=\ langle\ великий (v_0 cos\ тета\ великий) t, -\ dfrac12gt^2+\ великий (v_0\ sin\ тета\ великий) t\ діапазон +\ vecs C\\ [4pt]
\ text {Знаючи\(\vecs r(0) = \langle x_0,y_0\rangle\), робимо висновок\(\vecs C = \langle x_0,y_0\rangle\) і} &\\ [4pt]
\ vecs r (t) &=\ лангол\ великий (v_0\ cos\ тета\ великий) t+x_0\, -\ dfrac12gt^2+\ big (v_0\ sin\ theta\ big) t+y_0\\ rangle.
\ end {вирівнювати*}\]
Ключова ідея 53: Рух снаряда
Функція положення снаряда, що рухається з початкового положення\(\vecs r_0=\langle x_0,y_0\rangle\), з початковою швидкістю\(v_0\), з кутом підйому\(\theta\) і нехтуючи всіма прискореннями, але гравітація
\[\vecs r (t) = \langle \big(v_0\cos \theta\big)t+x_0\ , -\dfrac12gt^2+\big(v_0\sin\theta\big)t+y_0\ \rangle.\]
Letting\(\vecs v_0 = v_0\langle \cos \theta,\sin \theta\rangle\), (\ vecs r (t)\) можна записати як
\[\vecs r (t) = \langle 0,-\dfrac12gt^2\rangle + \vecs v_0t+\vecs r_0.\]
Ми продемонструємо, як використовувати цю функцію position у наступних двох прикладах.
Приклад\(\PageIndex{5}\): Projectile Motion
Сідней стріляє її Red Ryder bb гармати через рівень землі з висоти 4ft, де ствол гармати робить\(5^\circ\) кут з горизонталлю. Знайдіть, наскільки далеко bb подорожує перед посадкою, припускаючи, що bb звільняється з рекламованою швидкістю 350ft/s і ігноруючи опір повітря.
Рішення
Пряме застосування Key Idea 53 дає
\ [\ почати {вирівнювати*}
\ vecs r (t) &=\ лангове (350\ cos 5^\ коло) t, -16t^2 + (350\ sin 5^\ коло) t + 4\ діапазон\\ [4pt]
&\ приблизно\ langle 346.67t, -16t^2+30.50t+4\ діапазон,
\ кінець {вирівнювати*}]
де ми встановлюємо її початкове положення бути\(\langle 0,4\rangle\).
Нам потрібно знайти, коли bb приземлиться, тоді ми зможемо знайти де. Ми досягаємо цього, встановивши\(y\) -компонент рівний 0 і вирішивши для\(t\):
\ [\ почати {вирівнювати*}
-16t^2+30.50т+4 &= 0\\ [4pt]
t &=\ dfrac {-30.50\ pm\ sqrt {30.50^2-4 (-16) (4)}} {-32}\ [
4pt] t &\ приблизно 2,03 с.
\ end {вирівнювати*}\]
(Ми відкинули негативне рішення, яке вийшло з нашого квадратного рівняння.)
Ми виявили, що bb приземляється 2.03s після стрільби; з\(t=2.03\), ми знаходимо\(x\) -компонент нашої позиції функції\(346.67(2.03) = 703.74\) ft. Bb приземляється приблизно за 700 метрів від готелю.
Приклад\(\PageIndex{6}\): Projectile Motion
Алекс тримає bb пістолет своєї сестри на висоті 3ft і хоче стріляти в ціль, яка знаходиться на 6 футів над землею, 25 футів. Під яким кутом він повинен тримати пістолет, щоб вразити свою ціль? (Ми все ще припускаємо, що дульна швидкість становить 350ft/s.)
Рішення
Функція позиції для шляху bb Алекса дорівнює
\[\vecs r (t) = \langle (350\cos \theta)t, -16t^2+(350\sin\theta)t+3\rangle. \nonumber\]
Нам потрібно знайти\(\theta\) так, що\(\vecs r (t)\) =\ langle 25,6\ rangle\) для деякого значення\(t\). Тобто ми хочемо знайти\(\theta\) і\(t\) таке, що
\[(350\cos\theta)t = 25 \quad \text{and}\quad -16t^2+(350\sin\theta)t+3 = 6. \nonumber\]
Це не банально (хоча і не «важко»). Починаємо з вирішення кожного рівняння для\(\cos\theta\) і\(\sin \theta\), відповідно.
\[\cos\theta = \dfrac{25}{350t} \quad \text{and} \quad \sin\theta = \dfrac{3+16t^2}{350t}. \nonumber\]
Використовуючи Піфагорійську ідентичність\(\cos^2\theta+\sin^2\theta=1\), ми маємо
\[\left(\dfrac{25}{350t}\right)^2 + \left(\dfrac{3+16t^2}{350t}\right)^2 =1 \nonumber\]
Помножте обидві сторони на\((350t)^2\):
\[\begin{align*}25^2 + (3+16t^2)^2 &=350^2t^2\\[4pt] 256t^4-122,404t^2+634 &=0.\end{align*}\]
Це квадратичний в\(t^2\). Тобто ми можемо застосувати квадратичну формулу, щоб знайти\(t^2\), потім вирішити для\(t\) себе.
\ [\ почати {вирівнювати*}
t^2 &=\ dfrac {122,404\ пм\ sqrt {122,404 ^ 2-4 (256) (634)}} {512}\ [4pt]
t^2 &= 0,0052,\ 478.135\\ [
4pt] t &=\ вечора 0.072,\\ pm 21.866
\ кінець {вирівнювати*}\]
Очевидно, що негативні\(t\) значення не відповідають нашому контексту, тому ми маємо\(t=0.072\) і\(t=21.866\). Використовуючи\(\cos \theta = 25/(350 t)\), ми можемо вирішити для\(\theta\):
\ [\ почати {вирівнювати*}
\ тета &=\ cos^ {-1}\ лівий (\ dfrac {25} {350\ cdot 0.072}\ праворуч)\ квадратний\ текст {і}\ квад\ cos^ {-1}\ ліворуч (\ dfrac {25} {350\ cdot 21.866}\ праворуч)\\ [4pt]
\ тета = 7.03^\ circ квад\ текст {і}\ квад 89.8^\ circ.
\ end {вирівнювати*}\]
Алекс має два варіанти кута. Він може тримати гвинтівку під кутом приблизно\(7^\circ\) з горизонталлю і вразити свою ціль\(0.07\) s після стрільби, або він може тримати свою гвинтівку майже прямо вгору, з кутом\(89.8^\circ\), де він вдарить свою ціль близько 22 секунд пізніше. Перший варіант - це явно той варіант, який він повинен вибрати.
Пройдена відстань
Розглянемо водія, який встановлює свій круїз - контроль на 60 миль/год, і їде з цією швидкістю протягом години. Ми можемо запитати:
- Як далеко проїхав водій?
- Наскільки далеко від її вихідного положення знаходиться водій?
На першу легко відповісти: вона проїхала 60 миль. На друге неможливо відповісти наведеними відомостями. Ми не знаємо, чи їздила вона по прямій, по овальній іподромі або по повільно звивистій трасі.
Це підкреслює важливий факт: щоб обчислити пройдену відстань, нам потрібно лише знати швидкість, задану\(\norm{\vecs v (t)}\).
Теорема 96: Пройдена відстань
\(\vecs v (t)\)Дозволяти функція швидкості для рухомого об'єкта. Відстань, яку долає об'єкт на\([a,b]\), становить:
\[\text{distance traveled} = \int_a^b \norm{\vecs v (t)} dt .\]
Зауважте, що це лише повторення теореми 95: довжина дуги така ж, як пройдена відстань, тільки що розглядається в іншому контексті.
Приклад\(\PageIndex{7}\): Distance Traveled, Displacement, and Average Speed
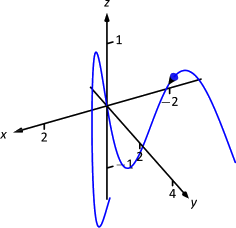
Частинка рухається в просторі з\(\vecs r (t) = \langle t,t^2,\sin (\pi t)\rangle\) включеною функцією положення\([-2,2]\), де\(t\) вимірюється в секундах, а відстані - в метрах. Знайти:
- Відстань, пройдену частинкою на\([-2,2]\).
- Зсув частинки на\([-2,2]\).
- Середня швидкість частинки.
Рішення
- Ми використовуємо теорему 96 для встановлення інтеграла:\[\begin{align*}\text{distance traveled} &= \int_{-2}^2 \norm{\vecs v (t)} dt \\[4pt]&= \int_{-2}^2 \sqrt{1+(2t)^2+ \pi^2\cos^2(\pi t)} dt .\end{align*}\] Це не може бути вирішено з точки зору елементарних функцій, тому ми перейдемо до числового інтегрування, знаходячи відстань 12,88 м.
- Зсув - це вектор\[\vecs r(2)-\vecs r(-2) = \langle 2,4,0\rangle - \langle -2,4,0\rangle = \langle 4,0,0\rangle. \nonumber\] Тобто частка закінчується\(x\) -значенням, збільшеним на 4, а з\(y\) - і\(z\) -значеннями однаковими (див. Рис.\(\PageIndex{5}\)).
- Вище ми виявили, що частинка подорожувала 12,88 м протягом 4 секунд. Ми можемо обчислити середню швидкість діленням: 12,88/4 = 3,22 м/с,
ми також повинні розглянути визначення 22 розділу 5.4, в якому сказано, що середнє значення функції\(f\)\([a,b]\) увімкнено\(\dfrac{1}{b-a}\int_a^b f(x)\ dx\). У нашому контексті середнє значення швидкості -\[\text{average speed} = \dfrac{1}{2-(-2)}\int_{-2}^2 \norm{\vecs v (t)} dt \approx \dfrac14 12.88 = 3.22\text{m/s}. \nonumber \]
Примітка, як фізичний контекст частинки, що подорожує, надає значення більш абстрактному поняттю, вивченому раніше.
У Визначенні 22 глави 5 ми визначили середнє значення функції\(f(x)\) on\([a,b]\) to be
\[ \dfrac{1}{b-a}\int_a^bf(x) dx.\]
Зверніть увагу, як у прикладі 11.3.7 ми обчислили середню швидкість як
\[\dfrac{\text{distance traveled}}{\text{travel time}} = \dfrac1{2-(-2)}\int_{-2}^2\norm{\vecs v (t)} dt ;\]
тобто ми якраз знайшли середнє значення\(\norm{\vecs v (t)}\) по\([-2,2]\).
Аналогічно, задана функція положення\(\vecs r (t)\), середня швидкість\([a,b]\) на
\[\dfrac{\text{displacement}}{\text{travel time}} = \dfrac1{b-a}\int_a^b \vecs{r}\,'(t) dt = \dfrac{\vecs r(b)-\vecs r(a)}{b-a};\]
тобто це середнє значення\(\vecs r\,'(t)\), або\(\vecs v (t)\), на\([a,b]\).
KEY IDEA 54: Середня швидкість, Середня швидкість
\(\vecs r(t)\)Дозволяти функція безперервної позиції на відкритому інтервалі,\(I\) що містить\(a<b\).
- Середня швидкість становить:
\[\dfrac{\text{distance traveled}}{\text{travel time}} = \dfrac{\int_a^b \norm{\vecs v (t)} dt }{b-a} = \dfrac1{b-a}\int_a^b\norm{\vecs v (t)} dt .\]
- Середня швидкість становить:
\[\dfrac{\text{displacement}}{\text{travel time}} = \dfrac{\int_a^b \vecs{r}\,'(t) dt }{b-a} = \dfrac1{b-a}\int_a^b\vecs{r}\,'(t) dt .\]
Наступні два розділи досліджують більше властивостей графіків векторно-значних функцій, і ми застосуємо ці нові ідеї до того, що ми щойно дізналися про рух.