2.5: Вступ до систем
- Page ID
- 33252

- Введення в поняття системи, яка є механізмом маніпулювання сигналами.
- Також коротко згадуються поняття зворотного зв'язку і суперпозиції.
Сигналами маніпулюють системи. Математично уявляємо, що робить система за допомогою позначення
\[y(t) = S\left ( x(t) \right ) \nonumber \]
з x, що представляє вхідний сигнал і y вихідний сигнал.
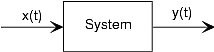
Це позначення імітує математичну символіку функції: вхід системи є аналогом незалежної змінної, а її висновок - залежна змінна. Для математично похилого система - це функціонал: функція функції (сигнали - це функції).
Прості системи можуть бути з'єднані між собою - вихід однієї системи стає входом іншої - для виконання деякої загальної конструкції. Топології взаємозв'язку можуть бути досить складними, але зазвичай складаються з плетінь трьох основних форм взаємозв'язку.
Каскадне взаємоз'єднання

Найпростіша форма - це коли вихід однієї системи підключається тільки до входу іншого. Математично,
\[w(t) = S_{1}\left ( x(t) \right )\\ y(t) = S_{2}\left ( x(t) \right ) \nonumber \]
з інформацією, що міститься в x (t) обробляється першою, потім другою системою. У деяких випадках впорядкування систем має значення, в інших - ні. Наприклад, в фундаментальній моделі комунікації порядок, безумовно, має значення.
Паралельне взаємоз'єднання
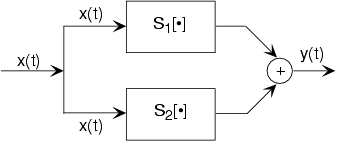
Сигнал x (t) направляється до двох (або більше) систем, при цьому цей сигнал з'являється як вхід для всіх систем одночасно і з однаковою силою. Блок-схеми мають угоду про те, що сигнали, що надходять до більш ніж однієї системи, не розбиваються на частини по шляху. Дві або більше систем працюють на x (t) і їх виходи складаються разом, щоб створити вихід y (t). Таким чином,
\[y(t) = S_{1}\left ( x(t) \right )+ S_{2}\left ( x(t) \right ) \nonumber \]
Інформація в x (t) обробляється окремо обома системами.
Зворотній зв'язок взаємозв'язку
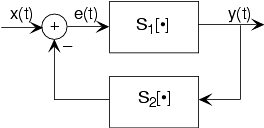
Найтонша конфігурація взаємозв'язку має вихід системи, який також сприяє її введенню. Інженери сказали б, що вихід «подається назад» на вхід через систему 2, звідси і термінологія. Математичне твердження взаємозв'язку зворотного зв'язку полягає в тому, що система подачі вперед виробляє вихід:
\[y(t) = S_{1}\left ( e(t) \right ) \nonumber \]
Вхід e (t) дорівнює вхідному сигналу мінус вихід деякої іншої системи на:
\[y(t):e(t) = x(t)- S_{2}\left ( y(t) \right ) \nonumber \]
Системи зворотного зв'язку всюдисущі в проблемах управління, з сигналом помилки, що використовується для регулювання виходу для досягнення певної умови, визначеної вхідним (контролюючим) сигналом. Наприклад, в системі круїз-контролю автомобіля x (t) - це константа, що представляє яку швидкість ви хочете, а y (t) - швидкість автомобіля, виміряна спідометром. У цьому додатку система 2 є системою ідентичності (вихід дорівнює входу).