12.3: Примусовий осцилятор
- Page ID
- 73979

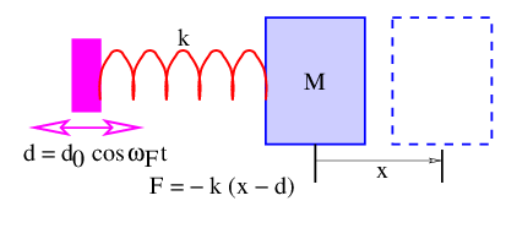
Якщо ми погойдуємо лівим кінцем пружини на величину\(\mathrm{d}=\mathrm{d}_{0} \cos \left(\omega_{\mathrm{F}} \mathrm{t}\right)\), як на малюнку 12.3, а не жорстко фіксуємо її, як на малюнку 12.1, то маємо форсований гармонійний генератор. Константа\(\mathrm{d}_{0}\) - це амплітуда нав'язаного ворушливого руху. Частота\(\omega_{F}\) форсування не обов'язково дорівнює природній або резонансній\(\omega=(\mathrm{k} / \mathrm{M})^{1 / 2}\) частоті масово-пружинної системи. Дуже різна поведінка\(\omega_{F}\) відбувається залежно від того, чи менше, дорівнює або більше\(\omega\).
З огляду на вищеописане ворушіння, сила пружини на масу стає,\(F=-k(x-d)=-k\left[x-d_{0} \cos \left(\omega_{F} t\right)\right]\) так як довжина пружини - це різниця між положеннями лівого і правого кінців. Виходячи з приводу непримусової мас-пружинної системи, приходимо до диференціального рівняння
\[\frac{d^{2} x}{d t^{2}}+\frac{k x}{M}=\frac{k d_{0}}{M} \cos \left(\omega_{F} t\right)\label{12.10}\]
Розв'язок цього рівняння виявляється сумою вимушеної частини, в якій\(x\) пропорційна,\(\cos \left(\omega_{F} t\right)\) і вільної частини, яка така ж, як і розв'язання невимушеного рівняння (12.2.4). Нас цікавить в першу чергу вимушена частина розв'язку, тому давайте встановимо\(x=x_{0} \cos \left(\omega_{F} t\right)\) і підставимо це в рівняння (\ ref {12.10}):
\[-\omega_{F}^{2} x_{0} \cos \left(\omega_{F} t\right)+\frac{k x_{0}}{M} \cos \left(\omega_{F} t\right)=\frac{k d_{0}}{M} \cos \left(\omega_{F} t\right)\label{12.11}\]
Знову косинусний коефіцієнт скасовується, і нам залишається алгебраїчне рівняння для х 0, амплітуда коливального руху маси.
Вирішуючи для відношення амплітуди коливань маси до амплітуди коливального руху\(\mathrm{x}_{0} / \mathrm{d}_{0}\), знайдемо
\[\frac{x_{0}}{d_{0}}=\frac{1}{1-\omega_{F}^{2} / \omega^{2}}\label{12.12}\]
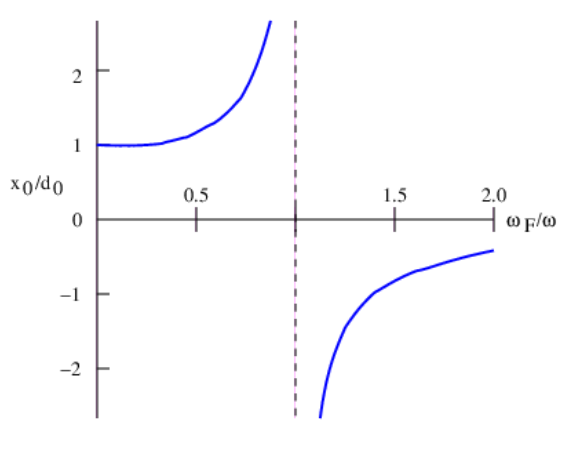
де ми визнали\(k / M=\omega^{2}\), що, квадрат частоти вільного коливання. Ця функція побудована на малюнку 12.4.
Зверніть увагу\(\omega_{F}<\omega_{1}\), що якщо рух маси знаходиться в фазі з рухом, що коливається, а амплітуда коливання маси більше, ніж амплітуда ворушіння. У міру наближення частоти форсування до власної частоти генератора реакція маси зростає в амплітуді. Коли форсування знаходиться на резонансній частоті, реакція технічно нескінченна, хоча практичні обмеження амплітуди коливання втрутяться в цьому випадку - наприклад, пружина не може розтягнутися або скорочуватися на нескінченну величину. У багатьох випадках тертя буде діяти, щоб обмежити реакцію маси на форсування поблизу резонансної частоти. Коли частота форсування більше, ніж власна частота, маса фактично рухається в протилежному напрямку руху ворушіння — тобто, реакція виходить з фази з форсуванням. Амплітуда відгуку зменшується у міру збільшення частоти форсування вище резонансної частоти.
Примусові і вільні гармонічні осцилятори складають важливу частину багатьох фізичних систем. Наприклад, будь-яке тіло з еластичного матеріалу, таке як міст або крило літака, має гармонійні коливальні режими. Поширеною інженерною проблемою є забезпечення того, щоб такі режими гасили тертям або якимось іншим фізичним механізмом, коли є можливість збудження цих режимів природними процесами. Ряд катастроф можна простежити до неможливості належного обліку коливального примусу в інженерних конструкціях.