16.A: Математика
- Page ID
- 74529
Векторні основи
Класична механіка описує рух тіл, коли вони рухаються через простір. Щоб описати рух у просторі, недостатньо дати позицію та швидкість: вам також потрібен напрямок. Тому ми працюємо з векторами: математичними об'єктами, які мають як величину, так і напрямок. Якщо ти скажеш мені, що рухаєшся, я щось знаю, але мало; я буду знати більше, якщо ти скажеш мені, що рухаєшся зі швидкістю ходьби, і отримаєш повну інформацію про свою швидкість, як тільки ти скажеш мені, що рухаєшся зі швидкістю ходьби до кавомашини. Хоча в принципі ми могли б зробити це з вказівкою величини і напрямку кожного вектора таким чином, часто зручніше виражати наші вектори в основі. Для цього ми вибираємо (довільне) походження та стільки базисних векторів, скільки ми маємо просторові розміри, таким чином, щоб вони не були паралельні один одному, а зазвичай взаємно перпендикулярні (ортогональні) та одиничної довжини (ортонормальні). Потім ми розкладаємо наш вектор, даючи його складові уздовж кожного з базисних векторів. Найбільш поширеним вибором є використання декартової основи, з двох або трьох (залежно від просторової розмірності) базисних векторів одиничної довжини, що вказують у стандартних напрямках x, y та z,\(\hat{\boldsymbol{x}}, \hat{\boldsymbol{y}}\) і вказують як і\(\hat{\boldsymbol{z}}\), або (досить дратівливо) іноді як\(\boldsymbol{i}, \boldsymbol{j}\) і\(\boldsymbol{k}\), останні особливо в Американські підручники. Інші часто зустрічаються системи - це полярні координати (2D) та циліндричні та сферичні координати (3D), див. математичний додаток для отримання додаткової інформації про них. Щоб написати наші вектори, ми тепер вказуємо компоненти в кожному напрямку, пишемо, наприклад,\(\boldsymbol{v}=3 \hat{\boldsymbol{x}}+3 \hat{\boldsymbol{y}}\) для вектора (жирним шрифтом), що представляє швидкість\(3 \sqrt{2}\) і напрямок, що робить кут\(45^{\circ}\) з горизонталлю.
Вектори можна додавати і віднімати так само, як скаляри - просто додайте і відніміть їх за складовими. Графічно ви додаєте два вектори, поставивши їх головою до хвоста: ви можете знайти суму двох векторів\(\boldsymbol{v}\) і\(\boldsymbol{w}\) поставивши початок\(\boldsymbol{w}\) в кінці\(\boldsymbol{v}\), суму\(\boldsymbol{v} + \boldsymbol{w}\) потім вказує від початку\(\boldsymbol{v}\) до кінця\(\boldsymbol{w}\). Ви також можете помножити вектор на скаляр, множивши кожен компонент вектора на цей скаляр. Графічно це означає, що ви розширюєте довжину вектора за допомогою скалярного коефіцієнта, на який ви щойно помножили.
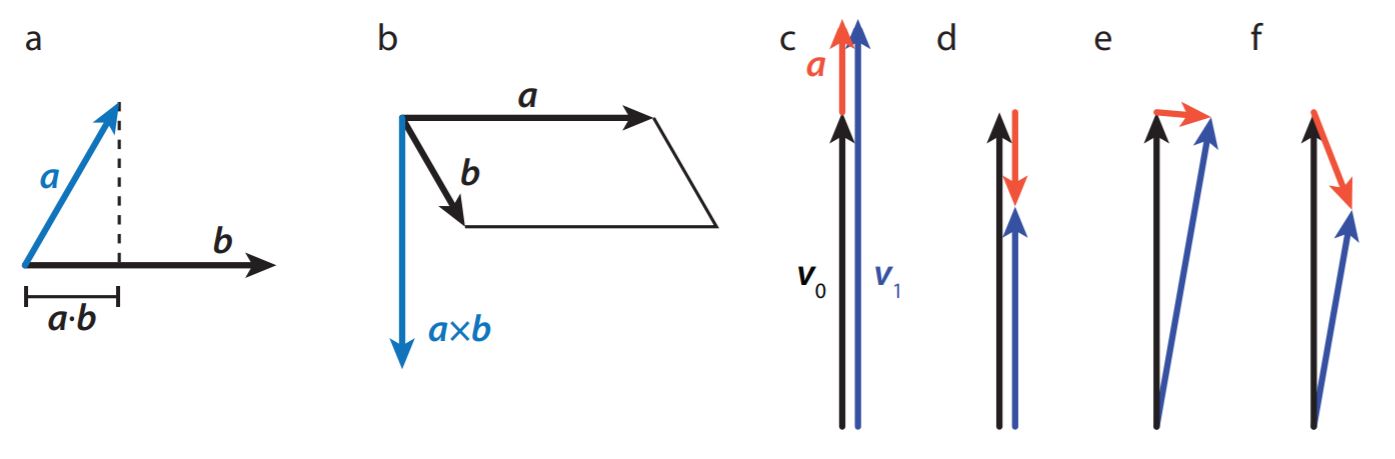
Ви не можете взяти добуток двох векторів, як ви б два скаляри. Однак існують дві векторні операції, які дуже нагадують твір, відомий як внутрішній (або крапковий) і зовнішній (або перехресний) продукт, див. Рис. 16.A.1. Точковий добуток представляє довжину проекції одного вектора на інший (і, таким чином, дає скаляр); він дорівнює нулю для перпендикулярних векторів, а точковий добуток вектора з самим собою дає квадрат його довжини. Щоб обчислити точковий добуток двох векторів, підсумуйте добуток їх складових: якщо\(\boldsymbol{v}=v_{x} \hat{\boldsymbol{x}}+v_{y} \hat{\boldsymbol{y}}\) і\(\boldsymbol{w}=w_{x} \hat{\boldsymbol{x}}+w_{y} \hat{y}\), то\(\boldsymbol{v} \cdot \boldsymbol{w}=v_{x} w_{x}+v_{y} w_{y}\). Ви можете використовувати точковий добуток, щоб знайти кут між двома векторами, використовуючи стандартну геометрію, яка дає
\[\cos \theta=\frac{\boldsymbol{v} \cdot \boldsymbol{w}}{|\boldsymbol{v}||\boldsymbol{w}|}=\frac{v_{x} w_{x}+v_{y} w_{y}}{|\boldsymbol{v}||\boldsymbol{w}|}\]
де\(|\boldsymbol{v}|\) і\(|\boldsymbol{w}|\) - довжини векторів\(\boldsymbol{v}\) і\(\boldsymbol{w}\), відповідно. Перехресний добуток визначається лише для тривимірних векторів, скажімо\(\boldsymbol{v}=v_{x} \hat{\boldsymbol{x}}+v_{y} \hat{\boldsymbol{y}}+v_{z} \hat{\boldsymbol{z}}\) і\(\boldsymbol{w}=w_{x} \hat{\boldsymbol{x}}+w_{y} \hat{\boldsymbol{y}}+w_{z} \hat{z}\). Результатом є інший вектор, з напрямком, перпендикулярним площині, що охоплюється\(\boldsymbol{v}\) і\(\boldsymbol{w}\), і величиною, рівною площі паралелограма, обмеженої ними. Перехресний добуток найбільш легко виражається у вигляді вектора стовпців:
\ [\ напівжирний символ {v}\ раз\ напівжирний символ {w} =\ лівий (\ почати {масив}
{c} {v_ {x}}\\
{v_ {y}}\\
{v_ {z}}
\ кінець {масив}\ вправо)\ раз\ лівий (\ почати {масив}
{c} {c} {w_
{x}}\\ {w_
{z}}\ end {масив}
\ праворуч) =\ ліворуч (\ почати {масив} {c}
{v_ {y} w_ {z} -v_ {z} w_ {y}}\\
{v_ {z} w_ {x} -v_ {x} w_ {z}}\\ {v_
{x} w_ {y} -v_ {y} w_ {y} w_ {x}}}
\ кінець {масив}\ право)\]
Перехресний добуток вектора з самим собою дорівнює нулю.
Вектори можуть бути функціями, подібно до скалярних величин: вони можуть залежати від одного або декількох параметрів, таких як позиція або час. Крім того, знову ж таки, як скалярні функції, ви можете обчислити швидкість зміни векторної функції під час переміщення через значення параметрів, наприклад, запитуючи, як швидкість автомобіля змінюється як функція часу. Миттєва швидкість зміни - це просто похідна, яка обчислюється точно так же, як і похідна скалярної функції. Наприклад, швидкість зміни швидкості, відома як прискорення\(\boldsymbol{a}\), визначається як:
\[\boldsymbol{a}=\lim _{\Delta t \rightarrow 0} \frac{\boldsymbol{v}(t+\Delta t)-\boldsymbol{v}}{\Delta t}\]
Оскільки сама швидкість є похідною від положення\(\boldsymbol{x}(t)\), прискорення також є другою похідною позиції. Похідні часу зустрічаються настільки часто в класичній механіці, що ми використовуємо для них спеціальне позначення: перша похідна позначається крапкою зверху величини, а друга похідна подвійною крапкою - так і маємо\(\boldsymbol{a}=\boldsymbol{\dot { x }}=\ddot{\boldsymbol{x}}\).
Векторні похідні дещо багатші, ніж у скалярних функцій, оскільки існує більше способів зміни вектора. Як і скалярна функція, величина вектора може збільшуватися або зменшуватися. Більш того, його напрямок також може змінюватися, що також означає, що він має ненульову похідну, і звичайно, у вас може бути поєднання зміни величини і зміни напрямку, див. Рис. 16.A.1.
Функції (скалярні або векторні), які визначаються в кожній точці простору, іноді називають полями. Прикладами можуть служити температура (скалярна) і вітер (вектор) в кожній точці планети, див. Рисунок 16.А.2. Так само, як ви можете обчислити швидкість зміни функції в часі, ви також можете розглянути, як функція змінюється в просторі. Для скалярної функції ця величина є вектором, відомим як градієнт, який визначається як вектор часткових похідних. Для функції f (x, y, z) ми маємо:
\ [\ напівжирний символ {\ nabla} f=\ frac {\ частковий f} {\ частковий х}\ hat {\ напівжирний символ {x}} +\ frac {\ частковий f} {\ частковий у}\ hat {\ boldsymbol {y}} +\ frac {\ partial z}\ hat {\ boldsymbol {z}} =\ left (\\ begin масив} {c}
{\ частковий f/\ частковий x}\\
{\ частковий f/\ частковий y}\\
{\ частковий f /\ частковий z}
\ end {масив}\ право)\]
Напрямок\(\boldsymbol{\nabla} f\) - це напрямок максимальної зміни, і його величина говорить вам, як швидко функція змінюється в цьому напрямку. Для векторного поля\(\boldsymbol{v}\) ми не можемо взяти градієнт, але ми можемо використовувати «вектор» часткових похідних\(\boldsymbol{\nabla}\) у поєднанні з крапкою або перехресним добутком. Перший варіант відомий як розбіжність\(\boldsymbol{v}\), і говорить вам, як швидко\(\boldsymbol{v}\) поширюється; другий - це завиток\(\boldsymbol{v}\) і говорить вам, скільки\(\boldsymbol{v}\) обертається:
\ [\ почати {вирівнювання}
\ ім'я оператора {div} (\ напівжирний символ {v}) &=\ напівжирний символ {\ набла}\ cdot\ напівжирний символ {v} =\ frac {\ частковий v_ {x}} {\ частковий х} +\ частковий v_ {y}} {\ частковий y} +\ частковий v_ {z}}\ частковий z}\\
\ ім'я оператора {curl} (\ напівжирний символ {v}) &=\ напівжирний символ {\ nabla}\ times\ напівжирний символ { v} =\ лівий (\ почати {масив}
{c} {\ partial_ {y} v_ {z} -\ частково_ {z} v_
{y}}\\ {\ partial_ {z} v_ {z}}\\ частковий _ {х}}\
\ частковий _ {x} v_ {y} v_ {y} _ {x}}
\ end {масив}\ праворуч)
\ end {align}\]
де\(\partial_{x}= \frac{\partial}{\partial x}\), і так далі.
Полярні координати
Ви можете вказати будь-яку точку на площині, вказавши її проекцію на дві перпендикулярні осі - ми зазвичай називаємо їх осями x і y і координатами x і y. У цій декартовій системі (названа на честь Декарта) ми ідентифікуємо одиничні вектори\(\hat{\boldsymbol{x}}\) і\(\hat{\boldsymbol{y}}\), вказуючи вздовж їх відповідних осей, і будучи одиничною довжиною. Потім положення\(\boldsymbol{r}\) може бути розкладено в двох напрямках:\(\boldsymbol{r}=r_{x} \hat{\boldsymbol{x}}+r_{y} \hat{\boldsymbol{y}}\), з\(r_{x}=\boldsymbol{r} \cdot \hat{\boldsymbol{x}}\) і\(r_{y}=\boldsymbol{r} \cdot \hat{\boldsymbol{y}}\). Як варіант, ми можемо написати\ (\ hat {\ boldsymbol {x}} =\ left (\ begin {масив}
{l} {1}\ end
{масив}
\ справа)\) і\ (\ hat {\ boldsymbol {y}} =\ left (\ begin {масив} {l} {0}\\
{1}\ end
{масив}
\ end {масив}\ право)\), який дає за\(\boldsymbol{r}\):
\ [\ напівжирний символ {r} =r_ {x}\ капелюх {\ напівжирний символ {x}} +r_ {y}\ капелюх {\ жирний символ {y}} =\ лівий (\ почати {масив} {l}
{r_ {x}}\\
{r_ {y}}
\ кінець {масив}\ праворуч)\]
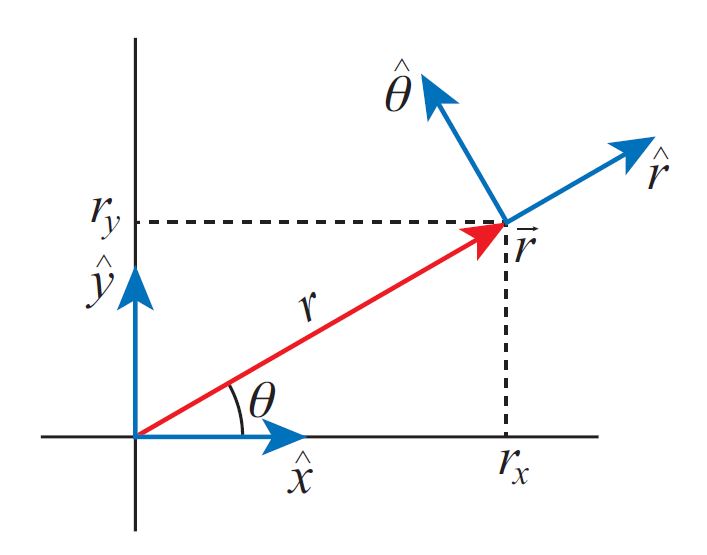
Замість того, щоб вказувати координати x і y нашої позиції, ми могли б також однозначно ідентифікувати його, давши два різних числа: його відстань до початку r, і кут\(\theta\), який пряма до початку робить з фіксованою опорною віссю (зазвичай вісь x), див. Рис. 16.A.3. Посилаючись на теорему Піфагора і основну тригонометрію,
ми з готовністю знаходимо\(r=\sqrt{r_{x}^{2}+r_{y}^{2}}\) і\(\tan \theta= \frac{r_{y}}{r_{x}}\). Називаємо r довжину вектора\(\boldsymbol{r}\). Ми також могли б інвертувати відносини для r і\(\theta\) тому ми можемо отримати декартові компоненти, якщо довжина і кут відомі:\(r_{x}=r \cos \theta\) і\(r_{y}=r \sin \theta\).
Як і декартові базисні вектори\(\hat{\boldsymbol{x}}\) та (\ hat {\ boldsymbol {y}}\), які вказують у напрямку збільшення значень x та y, ми також можемо визначити одиничні вектори, що вказують у бік збільшення r і\(\theta\). Ці напрямки залежать від нашого положення в просторі, але вони мають чітку геометричну інтерпретацію:\ hat {\ boldsymbol {r}} завжди вказує радіально назовні від початку, і\ hat {\ boldsymbol {\ theta}} у напрямку, який ви б рухалися, якщо ви робите обертання проти годинникової стрілки навколо початку. З огляду на вектор положення\(\boldsymbol{r}\), знайти вектор у напрямку збільшення r дуже легко:\(\hat{\boldsymbol{r}}= \boldsymbol{r} / r\). Вираз для r в нашій новій\((\hat{\boldsymbol{r}}, \hat{\boldsymbol{\theta}})\) полярній основі майже тавтологічний:\(\boldsymbol{r}=r \hat{\boldsymbol{r}}\).
Пов'язати полярні базисні вектори з декартовими є простим. У нас є:
\[\boldsymbol{r}=r_{x} \hat{\boldsymbol{x}}+r_{y} \hat{\boldsymbol{y}}=r \hat{\boldsymbol{r}}\]
і використання у\(r_{x}=r \cos \theta, r_{y}=r \sin \theta\) нас також є
\[\boldsymbol{r}=r \cos \theta \hat{\boldsymbol{x}}+r \sin \theta \hat{\boldsymbol{y}}\]
Таким чином, ми знаходимо це\(\hat{\boldsymbol{r}}=\cos \theta \hat{\boldsymbol{x}}+\sin \theta \hat{\boldsymbol{y}}\).
Бо\(\hat{\boldsymbol{\theta}\) відзначимо, що для обертання навколо початку напрямку руху потрібно перпендикулярно\(\hat{\boldsymbol{r}}\). Таких напрямків звичайно два - ми підбираємо знак, вимагаючи, щоб обертання проти годинникової стрілки було позитивним. Це дає\(\hat{\boldsymbol{\theta}}=\left(r_{y} / r\right) \hat{\boldsymbol{x}}-\left(r_{x} / r\right) \hat{\boldsymbol{y}}=\sin \theta \hat{\boldsymbol{x}}-\cos \theta \hat{\boldsymbol{y}}\). Виписані як вектори, ми маємо:
\ [\ капелюх {\ жирний символ {r}} =\ лівий (\ begin {масив}
{c} {\ cos\ тета}\\
{
\ sin\ theta}\ кінець {масив}\ праворуч),\ квад\ капелюх {\ boldsymbol {\ тета}
=\ лівий (\ begin
{масив} {\ sin
\ тета}\ праворуч)\]
Зверніть увагу, що
\[\hat{\boldsymbol{r}}=\frac{\partial \hat{\boldsymbol{\theta}}}{\partial \theta}, \quad \hat{\boldsymbol{\theta}}=-\frac{\partial \hat{\boldsymbol{r}}}{\partial \theta}\]
Природно, ми також можемо висловити декартову основу в терміні полярних:
\[\hat{\boldsymbol{x}}=\cos \theta \hat{\boldsymbol{r}}+\sin \theta \hat{\boldsymbol{\theta}}, \quad \hat{\boldsymbol{y}}=\sin \theta \hat{\boldsymbol{r}}-\cos \theta \hat{\boldsymbol{\theta}}\]
Рішення диференціальних рівнян
Диференціальне рівняння - це рівняння, яке містить похідні від визначеної функції. Вони можуть бути дуже простими. Наприклад, вам може бути вказана (постійна) швидкість автомобіля, яка є похідною від його положення, яку ми математично запишемо як:
\[v=\frac{\mathrm{d} x}{\mathrm{d} t}=v_{0} \label{velocity}\]
Щоб визначити, де машина закінчується через одну годину, нам потрібно вирішити це диференціальне рівняння. Також нам знадобиться другий фрагмент інформації: де автомобіль знаходився в якийсь контрольний час (зазвичай t = 0), початкова умова. Якщо\(x(0) = 0\), вам не потрібні передові навички математики, щоб зрозуміти це\(x(1 hour) = v0 \cdot (1 hour)\). На жаль, речі зазвичай не так просто.
Перш ніж ми перейдемо до декількох прийомів розв'язання диференціальних рівнянь, потрібна деяка термінологія. Порядок диференціального рівняння - це порядок найвищої похідної, знайденої у рівнянні; таким чином, рівняння\ ref {velocity} має перший порядок. Диференціальне рівняння називається звичайним, якщо воно містить лише похідні щодо однієї змінної, і частковим, якщо воно містить похідні до декількох змінних. Рівняння є лінійним, якщо воно не містить жодних добутків (похідних) невідомої функції. Нарешті, диференціальне рівняння є однорідним, якщо воно містить лише члени, що містять невідому функцію, і неоднорідним, якщо воно також містить інші члени. Рівняння\ ref {velocity} є звичайним і неоднорідним, оскільки\(v_0\) термін праворуч не містить невідомої функції\(x(t )\). У розділах нижче ми обговорюємо різні випадки, з якими ви зіткнетеся в цій книзі; є багато інших (багато з яких не можуть бути вирішені явно), яким присвячена ціла підобласть математики.
A.3.1. ЛІНІЙНІ ЗВИЧАЙНІ ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ ПЕРШОГО ПОРЯДКУ
Припустимо, у нас є загальне рівняння виду
\[a(t) \frac{\mathrm{d} x}{\mathrm{d} t}+b(t) x(t)=f(t) \label{A.11}\]
де\(a(t ), b(t )\) і\(f (t )\) знаходяться відомі функції\(t \), і\(x(t )\) це наша невідома функція. Рівняння\ ref {A.11} є звичайним, лінійним, неоднорідним диференціальним рівнянням першого порядку. Для її вирішення ми будемо використовувати дві надзвичайно корисні методи: поділ змінних та поділ на однорідні та конкретні рішення.
Припустимо, у нас було\(f (t ) = 0\). Тоді, якби ми мали два\(x_2 (t )\) розв'язки\(x_1 (t )\) і Equation\ ref {A.11}, ми могли б побудувати третій як\(x_{1}(t)+x_{2}(t)\) (або будь-яку лінійну комбінацію\(x_1 (t )\) і\(x_2 (t )\)), оскільки рівняння є лінійним. Тепер, оскільки\(f (t )\) це не нуль, ми не можемо цього зробити, але ми можемо зробити щось інше. Спочатку знаходимо найзагальніше рішення рівняння де\(f (t ) = 0\), яке ми називаємо однорідним рішенням\(x_h (t )\). По-друге, ми знаходимо рішення (будь-яке взагалі) повного Рівняння\ ref {A.11}, яке ми називаємо конкретним розв'язком\(x_p (t )\). Повне рішення - це сума цих двох розв'язків,\(x(t)=x_{\mathrm{h}}(t)+x_{\mathrm{p}}(t)\). Ви можете хвилюватися, що може бути кілька конкретних рішень: як би ми вибрали «правильне»? На щастя, хвилюватися не потрібно: однорідне рішення буде містити невідому змінну, яка буде встановлена початковою умовою. Зміна конкретного рішення призведе до зміни значення змінної, таким чином, що кінцеве рішення буде однаковим і задовольняє як диференціальному рівнянню, так і початковій умові.
Знайти розв'язку однорідного рівняння
\[a(t) \frac{\mathrm{d} x_{\mathrm{h}}}{\mathrm{d} t}+b(t) x_{\mathrm{h}}(t)=0 \label{A.12}\]
ми збираємося використовувати техніку під назвою поділ змінних. У цій системі є дві змінні: незалежний параметр t і залежний параметр x, хитрість полягає в тому, щоб отримати все, що залежить від t з одного боку знака рівності, і все залежить від x з іншого. Для цього ми будемо ставитися до dx/dt так, ніби це була фактична дріб 1. У такому випадку неважко помітити, що ми можемо перевпорядкувати Equation\ ref {A.12}
\[\frac{1}{x_{\mathrm{h}}} \mathrm{d} x_{\mathrm{h}}=-\frac{b(t)}{a(t)} \mathrm{d} t \label{A.13}\]
Сам по собі Equation\ ref {A.13} означає мало, але якщо ми інтегруємо обидві сторони, ми отримаємо щось, що має сенс:
\[\int \frac{1}{x_{\mathrm{h}}} \mathrm{d} x_{\mathrm{h}}=\log \left(x_{\mathrm{h}}\right)+C=-\int \frac{b(t)}{a(t)} \mathrm{d} t\]
або
\[x_{\mathrm{h}}(t)=A \exp \left[-\int \frac{b(t)}{a(t)} \mathrm{d} t\right] \label{A.15}\]
де\(A = exp(C)\) - константа інтеграції (невідома константа, яка буде встановлена нашим початковим умовою). Звичайно, в принципі неможливо оцінити інтеграл в Equation\ ref {A.15}, але навіть тоді рішення є дійсним. На практиці ви часто зіткнетеся з ситуаціями, в яких\(a(t )\) і\(b(t )\) є прості функції або навіть константи, а оцінка інтеграла проста. Тепер, коли у нас є наш однорідний розчин, нам ще знадобиться конкретний. Іноді вам пощастило, і ви можете легко вгадати один - наприклад, той, від якого\(t\) зовсім\(x_p (t )\) не залежить. У випадку, якщо вам не пощастило, є дві інші методи, які ви можете спробувати, або використовуючи варіацію констант, або знайшовши інтегруючий фактор. Щоб продемонструвати варіацію констант, ми підберемо конкретний приклад, щоб не загубитися в купі абстрактних функцій. \(a(t ) = a\)Дозволяти бути постійною і\(b(t ) = bt\) бути лінійною. Однорідний розчин тоді стає\(x_{\mathrm{h}}(t)=A \exp \left[-\frac{1}{2} \frac{b}{a} t^{2}\right]\). Константа, яку ми будемо варіювати, - це наша інтеграційна константа\(A\), тому наша здогадка для конкретного рішення буде
\[x_{\mathrm{p}}(t)=A(t) \exp \left[-\frac{1}{2} \frac{b}{a} t^{2}\right] \label{A.16}\]
Ми підставляємо\ ref {A.16} назад у повне диференціальне рівняння\ ref {A.11}, яке дає:
\[\left[a \frac{\mathrm{d} A}{\mathrm{d} t}-a A(t) \frac{b t}{a}+b t A(t)\right] \exp \left[-\frac{1}{2} \frac{b}{a} t^{2}\right]=a \frac{\mathrm{d} A}{\mathrm{d} t} \exp \left[-\frac{1}{2} \frac{b}{a} t^{2}\right]=f(t)\]
Велика частина лівої сторони таким чином скасовує, і це не випадково - це тому, що вона заснована на однорідному рівнянні. Залишається диференціальне рівняння\(A(t )\), яке можна тривіально вирішити шляхом прямої інтеграції:
\[A(t)=\int \frac{\mathrm{d} A}{\mathrm{d} t} \mathrm{d} t=\frac{1}{a} \int f(t) \exp \left[\frac{1}{2} \frac{b}{a} t^{2}\right] \mathrm{d} t \label{A.18}\]
Знову ж таки, можливо, неможливо оцінити інтеграл в Equation\ ref {A.18}, але в принципі рішення може бути вставлено в Equation\ ref {A.16}, щоб дати нам наше конкретне рішення, і все диференціальне рівняння буде розв'язано.
Крім того, ми можемо спробувати знайти коефіцієнт інтеграції для Equation\ ref {A.11}. Це означає, що ми намагаємося переписати ліву частину рівняння як загальну похідну, після чого ми можемо просто інтегруватися, щоб отримати рішення. Для цього ми спочатку ділимо все рівняння на\(a(t )\), потім шукаємо функцію,\(\mu (t )\) яка задовольняє умові, що
\[\frac{\mathrm{d}}{\mathrm{d} t}[\mu(t) x(t)]=\mu(t) \frac{\mathrm{d} x}{\mathrm{d} t}+x(t) \frac{\mathrm{d} \mu}{\mathrm{d} t} \bmod e l s \mu(t) \frac{\mathrm{d} x}{\mathrm{d} t}+\mu(t) \frac{b(t)}{a(t)} x(t)\]
з якого ми можемо зчитувати, що нам потрібно вирішити однорідне рівняння
\[\frac{\mathrm{d} \mu}{\mathrm{d} t}=\frac{b(t)}{a(t)} \mu(t) \label{A.20}\]
Ми можемо вирішити\ ref {A.20} розділенням констант, що дає нам
\[\mu(t)=\exp \left(\int \frac{b(t)}{a(t)} \mathrm{d} t\right)\]
де ми встановлюємо константу інтеграції на одиницю, оскільки вона\(x(t )\) все одно випадає з рівняння. За допомогою цієї функції\(\mu (t )\) ми можемо переписати рівняння\ ref {A.11} як
\[\frac{\mathrm{d}}{\mathrm{d} t}[\mu(t) x(t)]=\mu(t) \frac{f(t)}{a(t)}\]
які ми можемо інтегрувати, щоб знайти\(x(t )\):
\[x(t)=\frac{1}{\mu(t)} \int \mu(t) \frac{f(t)}{a(t)} \mathrm{d} t\]
A.3.2. ЛІНІЙНІ ЗВИЧАЙНІ ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ ДРУГОГО ПОРЯДКУ З ПОСТІЙНИМИ КОЕФІЦІЄНТАМИ
Звичайні диференціальні рівняння другого порядку мають важливе значення для вивчення механіки, оскільки його центральне рівняння, другий закон руху Ньютона (Equation 2.1.4) має такий тип. У випадку, якщо рівняння також лінійне, ми маємо певні надії розв'язати його аналітично. Є кілька прикладів цього типу рівняння в основному тексті, особливо в розділі 2.6, де ми вирішуємо рівняння руху, отримане з другого закону Ньютона для трьох особливих випадків, і Розділі 8.1, де ми вивчаємо ряд варіантів гармонічного осцилятора. Для випадку, коли рівняння однорідне і має постійні коефіцієнти, ми можемо записати загальне рішення 2. Рівняння, що підлягає розв'язанню, має вигляд
\[a \frac{\mathrm{d}^{2} x}{\mathrm{d} t^{2}}+b \frac{\mathrm{d} x}{\mathrm{d} t}+c x(t)=0 \label{A.24}\]
Для випадку\(a = 0\), що ми отримуємо диференціальне рівняння першого порядку, рішення якого є експоненціальним (як можна знайти шляхом поділу змінних та інтеграції):\(x(t) = C exp(c t/b)\). У багатьох випадках експоненціальна також є розв'язком Рівняння\ ref {A.24}. Щоб з'ясувати, яка експоненціальна, почнемо з trial функції (або 'Ansatz')\(x(t) = exp(\lambda t)\), де\(\lambda\) невідомий параметр. Підстановка цього Ансаца на рівняння\ ref {A.24} дає характеристичний многочлен для цієї оди:
\[a \lambda^{2}+b \lambda+c=0\]
який майже завжди має два рішення:
\[\lambda_{\pm}=-\frac{b}{2 a} \pm \frac{\sqrt{b^{2}-4 a c}}{2 a} \label{A.26}\]
Відзначимо, що рішення можуть бути реальними або складними. Якщо їх два, ми можемо записати загальний розв'язок 3 рівняння\ ref {A.24} як лінійну комбінацію Ansatz з двома випадками:
\[x(t)=A e^{\lambda_{+} t}+B e^{\lambda_{-} t} \label{A.27}\]
де A і B задаються або початковими, або граничними умовами. Оскільки\(\lambda_{\pm}\) може бути комплексним, так може бути A і B; саме їх комбінація повинна дати дійсне число (як\(x(t)\) реальне), див. Задача A.3.1a.
У випадку, якщо Equation\ ref {A.26} дає лише одне рішення, відповідна експоненціальна функція все ще є розв'язком Equation\ ref {A.24}, але вона не є найзагальнішою, оскільки перед нею можна поставити лише одну невизначену константу. Тому нам потрібно друге, незалежне рішення. Щоб вгадати один, ось третій корисний трюк 4: візьміть похідну від нашого відомого рішення\(e^{\lambda t}\), щодо параметра\(\lambda\). Це дає другий Ансац:\(t e^{\lambda t}\), де\(\lambda = −b/2a\). Підставляючи цей Ansatz в рівняння\ ref {A.24} для випадку\(c=b^{2} / 2 a\), що, ми знаходимо:
\[\frac{\mathrm{d}^{2} x}{\mathrm{d} t^{2}}+b \frac{\mathrm{d} x}{\mathrm{d} t}+\frac{b^{2}}{2 a} x(t)=a\left(-\frac{b}{a}+\frac{b^{2}}{4 a^{2}} t\right) e^{-\frac{b t}{2 a}}+b\left(1-\frac{b}{2 a} t\right) e^{-\frac{b t}{2 a}}+\frac{b^{2}}{4 a} t e^{-\frac{b t}{2 a}}=0\]
так що наш Ansatz знову є рішенням. Для цього особливого випадку загальне рішення дається
\[x(t)=A e^{-\frac{b t}{2 a}}+B t e^{-\frac{b t}{2 a}}\]
У розділі 8.2, де ми обговорюємо затухлий гармонічний генератор, особливий випадок відповідає критично затухаючому осцилятору. Ми отримуємо недогашений осцилятор, коли коріння характерного полінома складні, і надмірно затухаючий, коли вони реальні.
A.3.3. ЛІНІЙНІ ЗВИЧАЙНІ ДИФЕРЕНЦІАЛЬНІ РІВНЯННЯ ДРУГОГО ПОРЯДКУ ТИПУ ЕЙЛЕРА
Існує другий клас лінійних звичайних диференціальних рівнянь, які ми можемо вирішити явно: ті, що мають тип Ейлера (або Коші-Ейлера), де коефіцієнт перед похідною містить змінну до степені похідної, тобто для диференціального рівняння другого порядку, ми маємо як найбільш загальне форма:
\[a x^{2} \frac{d^{2} y}{d x^{2}}+b x \frac{d y}{d x}+c y(x)=0 \label{A.30}\]
Зауважте, що ми зараз вирішуємо для\(y(x)\); ми робимо це тому, що цей тип рівняння зазвичай виникає в контексті позицій, а не залежних від часу функцій. Прикладом може служити рівняння Лапласа\(\left(\nabla^{2} y=0\right)\) в полярних координатах. Як і для оди другого порядку з постійними коефіцієнтами, оду типу Ейлера можна узагальнити до рівнянь вищого порядку.
Існує (принаймні) два способи вирішення Equation\ ref {A.30}: через Ansatz і через зміну змінних. Для Ansatz, зверніть увагу, що для будь-якого полінома, похідна кожного члена зменшує владу на одиницю, і тут ми множимо кожен такий член зі змінною на ступінь кількість похідних 5. Це говорить про те, що ми просто спробуємо многочлен, так що наш Ansatz тут буде\(y(x)=x^{n}\). Підстановка в рівняння\ ref {A.30} дає:
\[a x^{2} n(n-1) x^{n-2}+b x n x^{n-1}+c x^{n}=[a n(n-1)+b n+c] x^{n}=0\]
тому ми отримуємо ще один многочлен другого порядку для вирішення, цього разу в\(n\):
\[a n^{2}+(b-a) n+c=0 \quad \Rightarrow \quad n_{\pm}=\frac{1}{2}-\frac{b}{2 a} \pm \frac{1}{2} \sqrt{(a-b)^{2}-4 a c} \label{A.32}\]
Якщо коріння в Equation\ ref {A.32} обидва дійсні (найпоширеніший випадок у задачах фізики), ми маємо два незалежних рішення, і ми закінчили. Якщо коріння складні, ми також маємо два незалежних розв'язки, хоча вони включають складні повноваження\(x\); як і для рівняння з постійними коефіцієнтами, ми можемо переписати їх як дійсні функції за формулою Ейлера (див. Задача A.3.1b). Для випадку, коли у нас тільки один корінь, ми знову застосовуємо наш трюк, щоб отримати другий: пробуємо\(\frac{\mathrm{d} x^{n}}{\mathrm{d} n}=x^{n} \ln (x)\), що виявляється дійсно рішенням (задач.3.1c), і загальним рішенням знову є лінійна комбінація двох знайдених рішень.
Крім того, ми могли б вирішити Equation\ ref {A.30} зміною змінних. Хоча цей метод іноді корисний (і тому добре знати про його існування), не існує систематичного способу отримання того, яка зміна змінних зробить трюк, тому вам доведеться пройти пробну версію (без апріорної гарантії успіху). У цьому випадку цей процес призводить до наступної підміни:
\[x=e^{t}, \quad y(x)=y\left(e^{t}\right) \equiv \phi(t) \label{A.33}\]
де ми вводимо\(\phi (t)\) для зручності. Беручи похідні\(y(x)\) з правилом ланцюга дає
\[\frac{\mathrm{d} y}{\mathrm{d} x}=\frac{\mathrm{d} y}{\mathrm{d} t} \frac{\mathrm{d} t}{\mathrm{d} x}=\frac{1}{x} \frac{\mathrm{d} \phi}{\mathrm{d} t}, \quad \frac{\mathrm{d}^{2} y}{\mathrm{d} x^{2}}=\frac{1}{x^{2}}\left(\frac{\mathrm{d}^{2} \phi}{\mathrm{d} t^{2}}-\frac{\mathrm{d} \phi}{\mathrm{d} t}\right) \label{A.34}\]
який є диференціальним рівнянням другого порядку з постійними коефіцієнтами, і, отже, вигляду, наведеного в Equation\ ref {A.24}. Тому ми знаємо, як знайти його рішення, і можемо використовувати Equation\ ref {A.33} для перетворення цих рішень назад у функції\(y(x)\).
A.3.4. Зменшення замовлення
Якщо ви опинилися з неоднорідним диференціальним рівнянням другого порядку, де однорідне рівняння або має постійні коефіцієнти, або має тип Ейлера, ви можете знову скористатися технікою варіації констант, щоб знайти конкретне рішення. Подібна методика, відома як зменшення порядку, може допомогти вам знайти розв'язки рівняння другого (або вищого) порядку, де коефіцієнти не є постійними. Для того, щоб мати можливість використовувати цю техніку, вам потрібно знати рішення однорідного рівняння, тому воно не настільки універсально застосовується, як методи в попередніх двох розділах, але все ж часто дуже корисно.
Запишемо загальне неоднорідне лінійне диференціальне рівняння другого порядку як
\[\frac{\mathrm{d}^{2} y}{\mathrm{d} x^{2}}+p(t) \frac{\mathrm{d} y}{\mathrm{d} x}+q(x) y(x)=r(x) \label{A.36}\]
Зауважте, що це найзагальніший вигляд: якщо перед другою похідною є коефіцієнт (постійний або інший), ми просто ділимо все рівняння на цей коефіцієнт і перевизначаємо коефіцієнти, щоб вони відповідали рівнянню\ ref {A.36}. Тепер припустимо, що у нас є рішення\(y_1 (x)\) однорідного рівняння (так для випадку, що\(r (x) = 0\)). Оскільки рівняння однорідне, для будь-якої\(v\) константи функція також\(v y_1 (x)\) буде рішенням. Як Ansatz для другого рішення спробуємо варіант варіації констант, і візьмемо
\[y_{2}(x)=v(x) y_{1}(x) \label{A.37}\]
де\(v(x)\) - довільна функція. Підставляючи\ ref {A.37} назад в\ ref {A.36}, знаходимо
\[y_{1}(x) \frac{\mathrm{d}^{2} v}{\mathrm{d} x^{2}}+\left[2 \frac{\mathrm{d} y_{1}}{\mathrm{d} x}+p(x) y_{1}(x)\right] \frac{\mathrm{d} v}{\mathrm{d} x}+\left[\frac{\mathrm{d}^{2} y_{1}}{\mathrm{d} x^{2}}+p(x) \frac{\mathrm{d} y_{1}}{\mathrm{d} x}+q(x) y_{1}(x)\right] v(x)=r(x)\]
Ми визнаємо префактор\(v(x)\) як саме однорідне рівняння, яке\(y_1 (x)\) задовольняє, тому цей термін зникає. Тепер визначаючи\(w(x)= \frac{\mathrm{d} v}{\mathrm{d} x}\), нам залишилося рівняння першого порядку для\(w(x)\):
\[y_{1}(x) \frac{\mathrm{d} w}{\mathrm{d} x}+\left[2 \frac{\mathrm{d} y_{1}}{\mathrm{d} x}+p(x) y_{1}(x)\right] w(x)=r(x) \label{A.39}\]
Рівняння\ ref {A.39} є лінійним диференціальним рівнянням першого порядку, яке може бути розв'язано методами з розділу A.3.1. \(w(x)= \frac{\mathrm{d} v}{\mathrm{d} x}\)Тоді інтеграція рівняння дає нам\(v(x)\), а отже і другий розв'язок\ ref {A.37} (неоднорідного) диференціального рівняння другого порядку.
A.3.5. РІШЕННЯ СЕРІЇ ПОТУЖНОСТІ
Якщо жодна з методів у розділах вище не застосовується до вашого диференціального рівняння, є один останній Ansatz, який ви можете спробувати: розширення рядів потужності вашого рішення. Для ілюстрації ми знову виберемо конкретний приклад: диференціальне рівняння Лежандра, задане
\[\frac{\mathrm{d}}{\mathrm{d} x}\left[\left(1-x^{2}\right) \frac{\mathrm{d} y}{\mathrm{d} x}\right]+n(n+1) y(x)=\left(1-x^{2}\right) \frac{\mathrm{d}^{2} y}{\mathrm{d} x^{2}}-2 x \frac{\mathrm{d} y}{\mathrm{d} x}+n(n+1) y(x)=0 \label{A.40}\]
де\(n\) - ціле число. Як Ansatz для рішення, ми спробуємо розширення серії потужності\(y(x)\):
\[y(x)=\sum_{k=0}^{\infty} a_{k} x^{k} \label{A.41}\]
Тепер наше завдання полягає в тому, щоб знайти числа\(a_k\) (багато з яких можуть дорівнювати нулю) такі, що\ ref {A.41} є розв'язком\ ref {A.40}. На щастя, ми можемо просто замінити наше пробне рішення та переоформити, щоб отримати
\ [\ почати {вирівняти}
0 &=\ ліворуч (1-x^ {2}\ праворуч)\ frac {\ mathrm {d} ^ {2}} {\ mathrm {d} x^ {2}}\ ліворуч (\ sum_ {k=0} ^ {k} x^ {k}\ праворуч) -2 х\ frac {\ mathrm {d}} {\ mathrm {d} x}\ ліворуч (\ sum_ {k=0} ^ {\ infty} a_ {k} x^ {k}\ праворуч) +n (n+1)\ sum_ {k=1} ^ {\ infty} a_ {k} x^ {k}\
&=\ ліворуч (1-x^ {2}\ праворуч)\ ліворуч (\ sum_ {k=0} ^ {\ infty} k (k-1) a_ {k} x^ {k-2}\ праворуч) -2 х\ ліворуч (\ сума {k=0} ^ {\ infty} k a_ {k} x^ {k-1}\ праворуч) +n (n+1)\ сума {k = 1} ^ {\ infty} a_ {k} x^ {k} k}\\
&=\ sum_ {k=0} ^ {\ infty}\ лівий [(-k (k-1) -2 к+n (n+1)) a_ {k} x^ {k} +k (k-1) a_ {k} x^ {k-2}\ праворуч]\\
&=\ сума {k=0} ^ {\\ infty}\ ліворуч [-k (-k (к+1) +н (н+1)) a_ {k} + (k+2) (k+1) a_ {k+2}\ праворуч] x^ {k}\ мітка {a.42d}
\ end {вирівнювання}\]
де в останньому рядку ми «зрушили» індекс останнього члена 6. Ми робимо це для того, щоб отримати при виразі коефіцієнт\(x^i\) для будь-якого значення\(k\). Оскільки функції лінійно\(x^k\) незалежні 7 (тобто ви не можете записати\(x^k\) як лінійну комбінацію інших функцій,\(x^m\) де\(m \neq k\)), коефіцієнт кожної з степенів у сумі в Equation\ ref {a.42d} повинен зникнути, щоб сума була однаково нульовою. Це дає нам рекуррентне відношення між коефіцієнтами\(a_k\):
\[a_{k+2}=\frac{k(k+1)-n(n+1)}{(k+2)(k+1)} a_{k} \label{A.43}\]
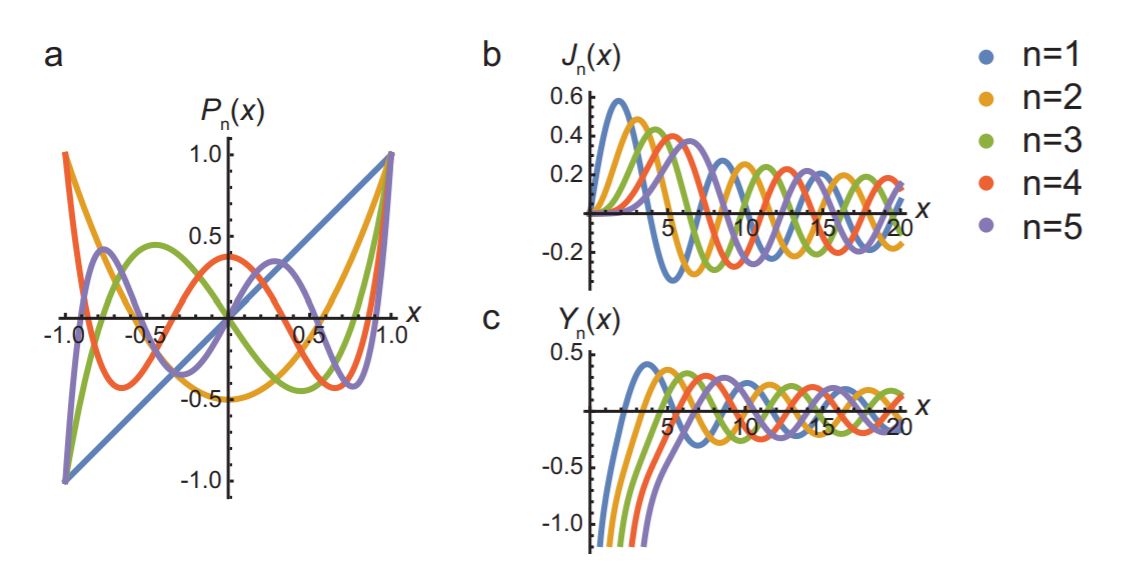
Враховуючи значення\(a_0\) і\(a_1\) (два ступені свободи, які дозволяє нам наше диференціальне рівняння другого порядку), ми можемо неодноразово застосувати Equation\ ref {A.43}, щоб отримати всі коефіцієнти. Зверніть увагу, що для\(k = n\) коефіцієнта дорівнює нулю. Тому, якщо для парного значення\(n\), ми ставимо\(a_1 = 0\), а для непарного значення\(n\), то отримаємо кінцеве число ненульових коефіцієнтів.\(a_0 = 0\) Отримані розв'язки є поліномами, що характеризуються числом\(n\); у цьому випадку вони відомі як многочлени Лежандра, зазвичай позначаються\(P_n (x)\) і нормалізуються (встановлюючи значення залишкового вільного коефіцієнта) таким чином, що\(P_n (1) = 1\). У таблиці A.1 перераховані перші п'ять, які також побудовані на малюнку 16.A.4a.
Поліноми Лежандра мають багато інших цікавих властивостей (багато з яких можна знайти або в підручниках з математики, або на їхній сторінці у Вікіпедії). Вони часто зустрічаються у фізиці, наприклад, при вирішенні задач, пов'язаних з гравітацією Ньютона або рівнянням Лапласа з електростатики.
Якщо замінити\(n(n + 1)\) коефіцієнт в диференціальному рівнянні Лежандра довільним числом\(\lambda\), розв'язок рядів залишається розв'язком, але він більше не закінчується 8. Існує безліч інших диференціальних рівнянь, які призводять як до нескінченних рядів, так і до поліноміальних розв'язків. Відомим прикладом є диференціальне рівняння Бесселя:
\[x^{2} \frac{\mathrm{d}^{2} y}{\mathrm{d} x^{2}}+x \frac{\mathrm{d} y}{\mathrm{d} x}+\left(x^{2}-n^{2}\right) y(x)=0 \label{A.44}\]
Розв'язки цього рівняння відомі як функції Бесселя першого та другого роду (див. Задача A.3.3, де ви доведете, що для цих функцій ряд ніколи не закінчується). Ці функції узагальнюють синусоїдальну і косинусну функцію і виникають в коливаннях двовимірних поверхонь. Інші приклади включають поліноми Ерміта і Лагерра, які мають місце в квантовій механіці, і функції Ейрі, з якими ви можете зіткнутися при вивченні оптики.
| \(n\) | \(P_n (x)\) |
|---|---|
| \ (n\) ">0 | \ (P_n (х)\) ">1 |
| \ (n\) ">1 | \ (P_n (x)\) ">х |
| \ (n\) ">2 | \ (P_n (x)\) ">\(\frac{1}{2}(3 x-1)\) |
| \ (n\) ">3 | \ (P_n (x)\) ">\(\frac{1}{2}\left(5 x^{3}-3 x\right)\) |
| \ (n\) ">4 | \ (P_n (x)\) ">\(\frac{1}{8}\left(35 x^{4}-30 x^{2}+3\right)\) |
| \ (n\) ">5 | \ (P_n (x)\) ">\(\frac{1}{8}\left(63 x^{5}-70 x^{3}+15 x\right)\) |
A.3.6. Проблеми
A.3.1
- Припустимо, ми маємо розв'язок Equation\ ref {A.24}, де коріння\(\lambda _{\pm}\) характеристичного полінома (Equation\ ref {A.26}) є комплексними, отже\(\lambda _{\pm} = \alpha \pm i \beta\). Перепишіть загальний розв'язок\ ref {A.27} у дійсних функціях з дійсними коефіцієнтами C і D, і висловіть C і D через A і B. Підказка: використовуйте формулу Ейлера\(e^{i x}=\cos (x)+i \sin (x)\).
- Припустимо, що у нас є розв'язок Equation\ ref {A.32}, де коріння\(n _{\pm}\) складні, отже\(n_{\pm} = \alpha \pm i \beta\). Щоб отримати розв'язок Equation\ ref {A.30} без комплексних чисел, ми робимо підстановку\(x = e^t\), тому\[x^{n_{\pm}}=x^{\alpha \pm i \beta}=e^{\alpha t} e^{\pm i \beta t}\] використовуйте формулу Ейлера знову, щоб переписати експоненціальну комплексну в терміні синусів і косинусів, і зробити зворотну заміну на x, щоб показати, що загальне рішення Equation\ ref {A.30} в цьому випадок наведено\[y(x)=x^{\alpha}[A \cos (\beta \ln (x))+\sin (\beta \ln (x))]\]
- Припустимо, що у нас є розв'язок Рівняння\ ref {A.32} для якого існує лише один корінь n. Покажіть, що похідна відносно n в цьому випадку також є розв'язком рівняння\ ref {A.30}, і що загальне рішення задається\(x^n\)\[y(x)=x^{n}[A+B \ln (x)]\]
А.3.2 Використовувати метод приведення порядку для отримання другого розв'язку Рівняння\ ref {A.24} для випадку, коли характеристичний многочлен (Equation\ ref {A.26}) має лише один корінь.
A.3.3
- Використовуйте метод степеневих рядів для пошуку розв'язку диференціального рівняння Бесселя\ ref {A.44}. Чому серія не припиняється в цьому випадку? Чому ви отримуєте лише одну сім'ю рішень? Ми назвемо ці рішення «функціями Бесселя першого роду» і позначимо їх як\(J_n (x)\) (див. Рис. 16.A.4b).
- Використовуйте метод приведення порядку для пошуку другої родини розв'язків диференціального рівняння Бесселя, відомого як «функції Бесселя другого роду» (\(Y_n (x)\)див. Рис. 16.A.4c).