7.1: Немає опору повітря
- Page ID
- 76452

Ми припускаємо, що частка проектується з точки O на початку системи координат,\(y\) вісь -вертикальна, а\(x\) вісь -спрямована вздовж землі. Частка проектується в\(xy\) -площині, з початковою\( V_{0}\) швидкістю під кутом\( \alpha\) до горизонту. У будь-який наступний час у його русі його швидкість дорівнює\( V\) і кут, який робить його рух з горизонталлю\( \psi\).
Початкова горизонтальна складова, якщо швидкість є\( V_{0} \cos \alpha\), і, при відсутності опору повітря, ця горизонтальна складова залишається постійною протягом усього руху. Я також буду називати цю постійну горизонтальну складову швидкості як\( u\). Тобто\( u=V_{0} \cos\alpha=\) постійний протягом усього руху.
Початковою вертикальною складовою швидкості є\( V_{0} \cos \alpha\), але вертикальна складова руху сповільнюється з постійною швидкістю\( g\). У більш пізній час під час руху вертикальна складова швидкості є\( V_{0} \cos \psi\), яку я також буду називати\( v\).
Далі я пишу в лівій колонці горизонтальну складову рівняння руху та перший та другий інтеграли часу; у правій колонці я роблю те ж саме для вертикальної складової.
| Горизонтальний | Вертикальний | |
|---|---|---|
| \( \ddot{x} = 0\) | \( \ddot{y} = -g\) | \( 7.1.1 a,b\) |
| \(\dot{x}=u=V_{0}\cos\alpha\) | \( \dot{x}=u=V_{0} \cos \alpha\) | \( 7.1.2 a,b\) |
| \( \dot{x}=u=V_{0}t\cos\alpha \) | \( \dot{x}=u=V_{0}t \cos \alpha-\frac{1}{2}gt^{2} \) | \( 7.1.3 a,b\) |
Рівняння\( 7.1.3a,b\) - це параметричні рівняння траєкторії. У векторній формі ці два рівняння можна записати як єдине векторне рівняння:
\[ r = V_{0}t + \frac{1}{2}gt^{2} \tag{7.1.4}\label{eq:7.1.4} \]
Зверніть увагу на знак + у правій частині Рівняння\(\ref{eq:7.1.4}\). Вектор g спрямований вниз.
\(xy\)-рівняння до траєкторії знайдено шляхом усунення\(t\) між рівняннями\( 7.1.3a\) та\( 7.1.3b\) отриманням:
\[ y = x\tan\alpha - \frac{gx^{2}}{2V_{0}^{2}cos^{2}\alpha} \tag{7.1.5}\label{eq:7.1.5} \]
Тепер перепишіть це у формі
\( x^{2} - ( )x = -( )y\)
Додайте до кожної сторони (половину коефіцієнта x) 2 для того, щоб «завершити квадрат» з лівого боку, і після деякої алгебри буде встановлено, що рівняння траєкторії можна записати як:
\[(x-A)^{2} = -4a(y-B), \tag{7.1.6}\label{eq:7.1.6} \]
де
\[ A=\frac{V^2_{0}\sin\alpha \cos\alpha}{g}=\frac{V_{0}\sin2\alpha}{2g} \tag{7.1.7}\label{eq:7.1.7} \]
\[ B=\frac{V_{0}^{2}\sin^{2}\alpha}{2g}\tag{7.1.8}\label{eq:7.1.8} \]
і
\[ a=\frac{V_{0}^{2}\cos^{2}\alpha}{2g}\tag{7.1.9}\label{eq:7.1.9} \]
Переставивши Рівняння\( \ref{eq:7.1.5}\) за формою\( \ref{eq:7.1.6}\), ми бачимо, що траєкторія - це парабола, вершина якої знаходиться в (A, B). Діапазон на горизонтальній площині дорівнює 2 А, або\( \frac{V_{0}^{2}\sin^{2}2\alpha}{g}\) Найбільший діапазон на горизонтальній площині виходить при\( \sin 2\alpha\) = 1, або\( \alpha\) = 45 о. Найбільший діапазон на горизонтальній площині тому\( \frac{V_{0}^{2}}{g}\) Максимальна досягнута висота - B, або\( \frac{V_{0}^{2}\sin^{2}\alpha}{2g}\) Відстань між вершиною та фокусом - a,\( \frac{V_{0}^{2}\cos^{2}\alpha}{2g}\) або.Фокус знаходиться над землею, якщо це менше максимальної висоти, і нижче земля, якщо вона більше максимальної висоти. Тобто фокус знаходиться над землею, якщо\( \cos^{2}\alpha < \cos^{2}\alpha\). Тобто фокус знаходиться над землею, якщо\( \alpha\) > 45 o і під землею, якщо\( \alpha\) < 45 o.
Радіус кривизни\( \rho\) в будь-якому місці по траєкторії можна знайти за звичайною формулою\( \rho = \frac{(1 + y \prime^{2})^{\frac{3}{2}} }{y\prime\prime}\). У верхній частині траєкторії\( y\prime = 0\), так що\( \ rho=\frac{1}{y\prime}\) Альтернативно (в разі, якщо хтось забув або незнайомий з «звичайною формулою»), відзначимо, що швидкість у верхній частині шляху якраз дорівнює (постійної) горизонтальної складової швидкості\(V_{0}\cos\alpha\). Потім ми можемо прирівняти доцентрове прискорення\(V_{0}^{2}\cos^{2}\frac{\alpha}{\rho}\) до\( g\) і, отже, отримати:
\[ \rho=\frac{V_{0}^{2}\cos^{2}\alpha}{g}.\tag{7.1.10}\label{eq:7.1.10} \]
Віднімаючи це з нашого виразу для максимальної висоти снаряда, ми знаходимо, що висота центру кривизни над землею дорівнює\( \frac{V_{0}^{2}(1-3\cos^{2}\alpha)}{2g}\) Центру кривизни знаходиться над землею if\( \alpha\) > 54 o
44'.
Діапазон r на площині, нахиленій під кутом\(\theta\) до горизонталі, можна знайти шляхом підстановки\( x = r \cos \theta\) and \( y = r sin \theta\) в\( \ref{eq:7.1.5}\) Рівнянні на траєкторію. Це призводить, після деякої алгебри, в
\[ r=\frac{V_{0}^{2}}{gcos^{2}\theta}[\sin(2\alpha-\theta) - \sin\theta].\tag{7.1.11}\label{eq:7.1.11} \]
Це найбільше, коли\( 2\alpha-\theta\) = 90 о; i. е. коли кут проекції перетинає кут між похилою площиною і вертикаллю. Максимальний діапазон
\[ r=\frac{V_{0}^{2}}{g(1 + \sin\theta)}.\tag{7.1.12}\label{eq:7.1.12} \]
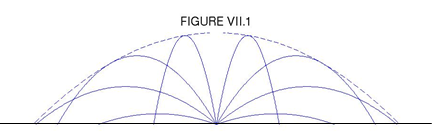
Це рівняння в полярних координатах параболи, і ця парабола при обертанні навколо своєї вертикальної осі описує параболоїд, відомий як параболоїд безпеки. Це огинаюча всіх можливих траєкторій з початковою швидкістю\( V_{0}\). Якщо гармата стріляє снарядами з початковою швидкістю\( V_{0}\), або газон спринклер викидає воду з початковою швидкістю\( V_{0}\), ви в безпеці до тих пір, поки ви знаходитесь поза параболоїдом безпеки. На малюнку VII.1 показані траєкторії для a = 20, 40, 60, 80, 100, 120, 140 і 160 градусів, і, як пунктирна лінія, параболоїд безпеки. Зверніть увагу, як змінюється діапазон з a і що він є найбільшим для a = 45 o.
Пістолет проектує снаряд, при відсутності опору повітря, під початковим кутом\( \alpha\) до горизонталі. Швидкість проекції змінюється в залежності від кута проекції і задається
Початкова швидкість =\( V_{0}\cos\frac{1}{2}\alpha\)
Показати, що для досягнення найбільшого діапазону на горизонтальній площині оболонка повинна проектуватися під кутом до горизонталі, косинус якої c задається рішенням рівняння
\( 3c^{3} + 2c^{2} -2c - 1 =0\)
Знайдіть оптимальний кут з точністю до однієї дугової хвилини.