3.4: Позначення
- Page ID
- 76307

У цьому розділі я припускаю, що ми\( n\) частинки розкидані через тривимірний простір. Ми виведемо деякі загальні властивості та теореми - і в тій мірі, в якій тверде тіло можна вважати складеним із системи частинок, ці властивості та теореми будуть однаково застосовуватися до твердого тіла.
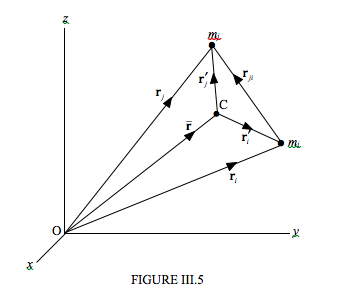
На малюнку III.5 я намалював лише дві частинки, (решта з них залишені вашій уяві) та центр маси C системи.
Дана частинка може мати зовнішню силу, що\( \bf{F}_{i}\) діє на неї. (Він може, звичайно, мати кілька зовнішніх сил, що діють на нього, але я маю на увазі під векторною сумою всіх зовнішніх сил, що діють на i -ю частинку.)\( \bf{F}_{i}\) Він також може взаємодіяти з іншими частинками в системі, і, отже, він може мати внутрішні сили, що\( \bf{F}_{ij}\) діють на неї, де\( j\) переходить від 1 до\( n\) крім\( i\). Я визначаю векторну суму\( \bf F = \sum F_{i}\) як загальну зовнішню силу, що діє на систему.
Я збираюся встановити наступні позначення для цілей цієї глави.
- Маса \( i\)ї частинки =\( m_{i}\)
- Загальна маса системи\(M= \sum m_{i}\)
- Вектор положення \( i\)ї частинки, віднесеної до фіксованої точки O:\( \textbf{r}_{i} = x_{i} \hat{\textbf{x}} + y_{i} \hat{\textbf{y}} + z_{i} \hat{\textbf{z}}\)
- Швидкість частинки, \( i\)віднесеної до фіксованої точки O:\( \textbf{r}_{i}\) або\( \textbf{v}_{i}\) (Speed =\( v_{i}\))
- Лінійний імпульс частинки відносять до фіксованої точки O: \( i\)\(\textbf{p}_{i} = m_{i} \textbf{v}_{i}\)
- Лінійний імпульс системи:\(\textbf{P} = \sum \textbf{P}_{i} = \sum m_{i} \textbf{v}_{i}\)
- Зовнішня сила \( i\)на частинку:\(\textbf{F}_{i}\)
- Загальна зовнішня сила на систему:\( \textbf{F} = \sum \textbf{F}_{i}\)
- Кутовий момент (момент імпульсу \( i\)) частинки відносять до фіксованої точки O:\[\textbf{l}_{i} = \textbf{r}_{i} \times \textbf{p}_{i} \nonumber \]
- Кутовий імпульс системи:\( \textbf{L} = \sum \textbf{l}_{i} = \sum \textbf{r}_{i} \times \textbf{p}_{i}\)
- Крутний момент на i частинці відносять до фіксованої точки O:\( \boldsymbol\tau_{i} = \textbf{r}_{i} \times \textbf{F}_{i}\)
- Загальний зовнішній крутний момент на системі по відношенню до походження:\[ \boldsymbol\tau = \sum \boldsymbol\tau_{i} = \sum \textbf{r}_{i} \times \textbf{F}_{i} \nonumber \]
Кінетична енергія системи: (Ми маємо справу з системою частинок — тому маємо справу лише з поступальною кінетичною енергією — без обертання або вібрації):
\( T = \sum \frac{1}{2} m_{i}v_{i}^{2} \)
Вектор положення центру мас, віднесений до фіксованої точки O:\(\overline{\textbf{r}}_{i} =\overline{x}\hat{\textbf{x}} + \overline{y}\hat{\textbf{y}} + \overline{z}\hat{\textbf{z}} \)
Центр маси визначається\(M \overline{\textbf{r}} = \sum m_{i} \textbf{r}_{i}\)
Швидкість центру мас, віднесеного до фіксованої точки O:\( \overline{\textbf{r}} = \overline{\textbf{v}}\) (Швидкість =\( \overline{v}\))
Для векторів позицій необгрунтовані однорядкові символи будуть посилатися на O. загрунтовані однорядкові символи будуть посилатися на C. Це буде зрозуміло, сподіваюся, з малюнка III.5.
Вектор положення \( i\)частинки, віднесеної до центру маси C:\( \textbf{r}'_{i} = \textbf{r}_{i} - \overline{\textbf{r}}_{i}\)
Вектор положення частинки \( j\)по відношенню до частинки \( i\):\(\textbf{r}_{ij} = \textbf{r}_{j} - \textbf{r}_{i}\)
(Внутрішня) сила, що чиниться на частинку \( i\)частинкою \( j\):\(\textbf{F}_{ij}\)
(Внутрішня) сила, що чиниться на частинку \( j\)частинкою \( i\):\(\textbf{F}_{ji}\)
Якщо сила між двома частинками відштовхує (наприклад, між електрично зарядженими частинками одного і того ж знака), то\(\textbf{F}_{ji}\) і\(\textbf{r}_{ji}\) знаходяться в одному напрямку. Але якщо сила є привабливою силою,\(\textbf{F}_{ji}\) і\(\textbf{r}_{ji}\) знаходяться в протилежних напрямках.
Відповідно до Третього закону руху Ньютона (Lex III)\(\textbf{F}_{ij} = -\textbf{F}_{ji} \)
Сумарний момент імпульсу системи, віднесений до центру мас С:\(\textbf{L}_{C}\)
Загальний зовнішній крутний момент на системі відноситься до центру маси C:\(\boldsymbol \tau_{C}\)
Для швидкості центру маси я можу використовувати\( \dot{\overline{\textbf{r}}}\) або\( \overline{\textbf{v}}\)
O - довільне походження координат. C - центр маси.
Зауважте, що
\ почати {рівняння}\\ textbf {r} _ {i} =\ оверлайн {\ textbf {r}} +\ textbf {r} _ {i} ^ {\ прайм}\ тег {3.4.1}\ мітка {еква:3.4.1}\ кінець {рівняння}
і тому
\ почати {рівняння}\\ точка {\ верхня лінія {\ textbf {r}} _ {i}} =\ точка {\ overline {\ textbf {r}}} +\ точка {\ textbf {r} _ {i} ^ {\ прайм}};\ тег {3.4.2}\ мітка {еква:3.4.2}\ кінець {рівняння}
тобто
\ почати {рівняння}\\ textbf {v} _ {i} =\ оверлайн {\ textbf {v}} +\ textbf {v} _ {i} ^ {\ прайм}\ тег {3.4.3}\ мітка {еква:3.4.3}\ кінець {рівняння}
Зауважте також, що
\ begin {рівняння}\\ сума m_ {i}\ textbf {r} _ {i} ^ {\ прайм} = 0\ тег {3.4.4}\ мітка {eq:3.4.4}\ кінець {рівняння}
Зауважте далі, що
\ почати {рівняння}\ сума m_ {i}\ textbf {v} '_i=\ сума m_ {i} (\ textbf {v} _i -\ overline {\ textbf {v}}) =\ сума m_ {i}\ textbf {v} _ {i} -\ оверлайн {\ textbf {v}}\ сума m_ {i} = M\ overline {\ textbf {v}} -\ оверлайн {\ textbf {v}} M = 0\ тег {3.4.5}\ мітка {eq:3.4.5}\ кінець {рівняння}
Тобто сумарний лінійний імпульс по відношенню до центру мас дорівнює нулю.
Встановивши наші позначення, ми тепер перейдемо до деяких теорем, що стосуються систем частинок. Можливо, вам буде корисніше викликати фізичну картину у вашій свідомості, що означають наступні теореми, ніж запам'ятовувати деталі похідних.