8.3: Підсилення та обертання
- Page ID
- 77261

Цілі навчання
- Поясніть обертання та прискорення
Один мій родич закохався. Вона з хлопцем купила будинок в Підмосков'ї і народила дитину. Вони думають, що вийдуть заміж в якийсь пізніше. Інженер за освітою, каже, що не хоче зациклюватися на «порядку операцій». Для деяких математичних операцій порядок не має значення:\(5 + 7\) такий же, як\(7 + 5\).
Обертання
Малюнок\(\PageIndex{1}\) показує, що порядок операцій має значення для обертань. Обертається навколо\(x\) осі, а потім\(y\) дає інший результат, ніж\(y\) наступний\(x\). Ми говоримо, що обертання некомутативні. Ось чому в ньютонівській механіці ми не маємо вектора кутового зміщення\(∆θ\); вектори повинні бути адитивними, а додавання векторів - комутативним. Однак для малих обертань невідповідність, спричинена вибором одного порядку операцій, а не іншого, стає малим (порядку\(θ^2\)), тому ми можемо визначити нескінченно малий вектор переміщення\(dθ\), напрямок якого задається правилом правої руки, і кутову швидкість\(ω = dθ/dt\).
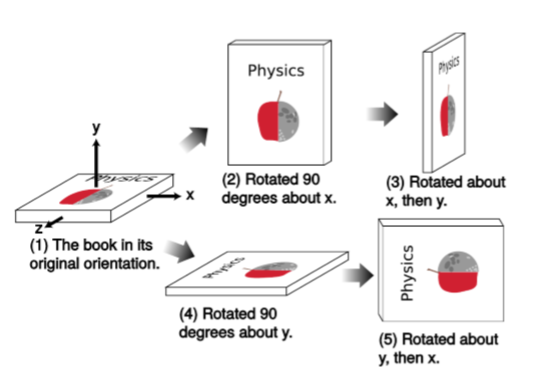
Як приклад того, як це працює для малих обертань, візьмемо вектор
\[(0,0,1)\]
і застосовувати операції, показані на малюнку\(\PageIndex{1}\), але з обертаннями лише\(θ = 0.1\) радіанів, а не\(90\) градусів. Поворот на цей кут навколо\(x\) осі задається перетворенням
\[(x,y,z) → (x,y \cos θ - z \sin θ,y \sin θ + z \cos θ)\]
і застосування цього до вихідного вектора дає таке:
\[(0.00000,-0.09983,0.99500)\; \; \; (\text{after }x)\]
Після подальшого повороту на той же кут, на цей раз навколо\(y\) осі, маємо
\[(0.09933,-0.09983,0.99003) \; \; \; (\text{after }x, \text{then }y)\]
Починаючи з початкового вектора на малюнку\(\PageIndex{1.1}\) і виконуючи операції в протилежному порядку, ви отримаєте такі результати:
\[(0.09983,0.00000,0.99500) \; \; \; (\text{after }y)\]
\[(0.09983,-0.09933,0.99003) \; \; \; (\text{after }y, \text{then }x)\]
Невідповідність між (\(\PageIndex{1.3}\)) і (\(\PageIndex{1.5}\)) - це обертання на дуже майже\(0.005\) радіани в\(xy\) площині. Як стверджувалося, це на замовлення\(θ^2\) (по суті, це майже точно\(θ^2/2\)). Єдиний приклад ніколи не може нічого довести, але це приклад загального правила, що обертання вздовж різних осей не комутуються, а для малих кутів невідповідність - це обертання в площині, визначеній двома осями, з величиною, максимальний розмір якої знаходиться на порядку\(θ^2\).
Підсилює
Щось подібне відбувається для підсилень. У\(3 + 1\) розмірах починаємо з вектора
\[(0,1,0,0)\]
спрямовуючи уздовж\(x\) осі. Збільшення Лоренца з\(v = 0.1\) (Рівняння 1.4.1) у\(x\) напрямку дає
\[(0.10050,1.00504,0.00000,0.00000) \; \; \; (\text{after }x)\]
і другий імпульс, тепер у\(y\) напрямку, виробляє це:
\[(0.10101,1.00504,0.01010,0.00000) \; \; \; (\text{after }x, \text{then }y)\]
Починаючи з (\(\PageIndex{6}\)) і виконуючи підсилення у зворотному порядку, ми маємо
\[(0.00000,1.00000,0.00000,0.00000) \; \; \; (\text{after }y)\]
\[(0.10050,1.00504,0.00000,0.00000) \; \; \; (\text{after }y, \text{then }x)\]
Невідповідність між (\(\PageIndex{8}\)) і (\(\PageIndex{10}\)) - це обертання в\(xy\) площині на дуже майже\(0.01\) радіани. Це приклад більш загального факту, який полягає в тому, що підсилювачі вздовж різних осей не коммутують, а для малих кутів невідповідність - це обертання в площині, визначеній двома посиленнями, з величиною, максимальний розмір якої знаходиться на порядку\(v^2\), в одиницях радіанів.
Томас Прецесія
\(\PageIndex{2}\)На малюнку показано найважливіше фізичне наслідок всього цього. Гіроскоп направляється по периметру квадрата, з імпульсами, що забезпечуються молотковими кранами по кутах. Кожен імпульс може бути змодельований як імпульс Лоренца, позначений, наприклад,\(L_x\) для поштовху в\(x\) напрямку. Серію з чотирьох операцій можна записати як\(L_yL_xL_{-y}L_{-x}\), використовуючи нотаційну угоду про те, що перша застосована операція - це та, що знаходиться в правій частині списку. Якби підсилення були комутаційними, ми могли б поміняти дві операції посередині списку, даючи\(L_yL_{-y}L_xL_{-x}\). Він скасував\(L_x\) би\(L_{-x}\), і скасував\(L_y\) би\(L_{-y}\). Але підсилення не є комутативними, тому вектор, що представляє орієнтацію гіроскопа, обертається в\(xy\) площині. Цей ефект називається прецесією Томаса, після Ллевелліна Томаса (1903-1992). Прецесія Томаса - це чисто релятивістський ефект, оскільки ньютонівський гіроскоп не змінює свою вісь обертання, якщо не піддається крутному моменту; якщо підсилення здійснюються силами, які діють в центрі гіроскопа, то немає нерелятивістського пояснення ефекту.

Зрозуміло, що ми повинні бачити той же ефект, якщо ривковий рух в Фігуре\(\PageIndex{2}\) було замінено рівномірним круговим рухом, і щось подібне повинно відбуватися в будь-якому випадку, коли обертається об'єкт відчуває зовнішню силу. У межі низьких швидкостей загальним виразом для кутової швидкості прецесії є\(Ω = a×v\), а в разі кругового руху\(ω\) - частота кругового руху.\(Ω = \frac{1}{2}v^2ω\)
Якщо ми хочемо побачити цей ефект прецесії в реальному житті, нам слід шукати систему, в якій обидва\(v\) і\(a\) великі. Атом - це така система. Модель Бора, введена в 1913 році, ознаменувала перший кількісно вдалий, якщо концептуально заплутаний, опис рівнів атомної енергії водню. Продовжуючи приймати\(c = 1\), загальна шкала енергій була розрахована\(m\) так\(mα^2\), щоб бути пропорційною, де маса електрона, і\(α\) є постійною тонкої структури, визначеної раніше. При більш високій роздільній здатності кожен рівень збудженої енергії виявляється розділеним на кілька підрівнів. Переходи серед цих близьколежачих станів знаходяться в міліметровій області мікрохвильового спектра. Енергетична шкала цієї тонкої структури є\(∼ mα^4\). Це знижується на коефіцієнт в\(α^2\) порівнянні з видимим світлом переходів, звідси і назва константи. Уленбек і Гудсміт показали в 1926 році, що розщеплення на такому порядку слід було очікувати через магнітну взаємодію між протоном і магнітним моментом електрона, орієнтованим уздовж його спіна. Ефект, який вони розрахували, однак, був занадто великим у два рази.

Пояснення таємничого фактора двох насправді було неявним у розрахунку 1916 року Віллемом де Сіттером, одним з перших застосувань загальної теорії відносності. Де Сіттер розглядав систему земля-місяць як гіроскоп, і виявив прецесію її осі обертання, що частково було пов'язано з кривизною простору-часу і частково обумовлено типом обертання, описаним раніше в цьому розділі. Вплив на рух Місяця був некумулятивним і становив лише близько одного метра, що було занадто мало, щоб його можна було виміряти в той час. Однак у 1927 році Томас застосував подібні міркування до атома водню, причому спіновий вектор електрона грав роль гіроскопа. Оскільки спін електрона є\(\hbar /2\), то розщеплення енергії відбувається\(\pm (\hbar /2) \Omega\), в залежності від того, чи спин електрона знаходиться в тому ж напрямку, що і його орбітальний рух, або в протилежному напрямку. Це менше, ніж валова енергетична шкала атома\(\hbar \omega\) на коефіцієнт\(v^2/2\), який є\(∼ α^2\). Прецесія Томаса скасовує половину магнітного ефекту, приводячи теорію в узгодження з експериментом.
Уленбек пізніше згадував: «... коли я вперше почув про [прецесію Томаса], здавалося неймовірним, що релятивістський ефект може дати фактор 2 замість чогось порядку\(v/c\)... Навіть співрозмовник теорії відносності (Ейнштейн включений!) були дуже здивовані. »