32.3: Вектори
- Page ID
- 26771
У цьому розділі ми розглянемо кілька понять, які ви, мабуть, знаєте зі своїх курсів фізики. Цей розділ не має наміру висвітлювати цю тему всебічно, а натомість торкнеться кількох понять, які ви будете використовувати на заняттях з фізичної хімії.
Вектор - це величина, яка має як величину, так і напрямок, і як така вони використовуються для визначення положення, швидкості та імпульсу частинки або для визначення сили. Вектори зазвичай позначаються жирним шрифтом (наприклад\(\mathbf{u}\)) або стрілкою над символом (наприклад\(\vec{u}\)). Тільда, розміщена над або під назвою вектора, також зазвичай використовується в скороченні (\(\widetilde{u}\),\(\underset{\sim}{u}\)).
Якщо помножити число\(a\) на вектор\(\mathbf{v}\), ми отримаємо новий вектор, який паралельний оригіналу, але з довжиною, яка в\(a\) рази перевищує довжину\(\mathbf{v}\). Якщо\(a\) негативні\(a\mathbf{v}\) моменти в протилежну сторону ніж\(\mathbf{v}\). Ми можемо висловити будь-який вектор через так звані одиничні вектори. Ці вектори, які позначаються\(\hat{\mathbf{i}}\),\(\hat{\mathbf{j}}\) і\(\hat{\mathbf{k}}\), мають одиничну довжину і точку уздовж позитивної\(x, y\) і\(z\) осі декартової системи координат (рис.\(\PageIndex{1}\)). Символ\(\hat{\mathbf{i}}\) читається «i-hat». Капелюхи використовуються для позначення того, що вектор має одиницю довжини.
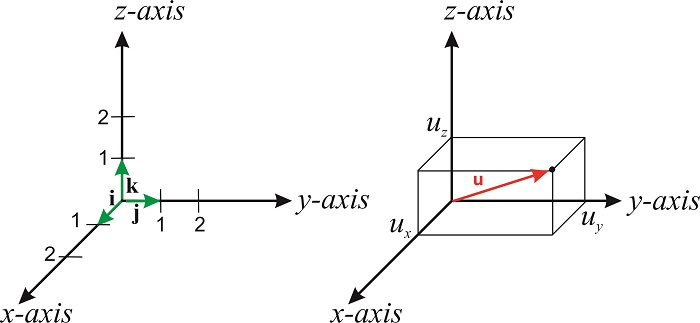
Довжина\(\mathbf{u}\) - це його величина (або модуль), і зазвичай позначається\(u\):
\[\label{eq:vectors1} u=|u|=(u_x^2+u_y^2+u_z^2)^{1/2}\]
Якщо у нас є два вектори\(\mathbf{u}=u_x\hat{\mathbf{i}}+u_y \hat{\mathbf{j}}+u_z \hat{\mathbf{k}}\) і\(\mathbf{v}=v_x \hat{\mathbf{i}}+v_y \hat{\mathbf{j}}+v_z \hat{\mathbf{k}}\), ми можемо додати їх для отримання
\[\mathbf{u}+\mathbf{v}=(u_x+v_x)\hat{\mathbf{i}}+(u_y+v_y)\hat{\mathbf{j}}+(u_z+v_z)\hat{\mathbf{k}} \nonumber\]
або відніміть їх, щоб отримати:
\[\mathbf{u}-\mathbf{v}=(u_x-v_x)\hat{\mathbf{i}}+(u_y-v_y)\hat{\mathbf{j}}+(u_z-v_z)\hat{\mathbf{k}} \nonumber\]
Коли справа доходить до множення, ми можемо виконати добуток двох векторів двома різними способами. Перший, який дає скаляр (число) в результаті, називається скалярним добутком або точковим добутком. Друге, що дає вектор в результаті, називається векторним (або перехресним) добутком. Обидва є важливими операціями з фізичної хімії.
Скалярний добуток
Скалярний добуток векторів\(\mathbf{u}\) і\(\mathbf{v}\), також відомий як крапковий добуток або внутрішній добуток, визначається як (зверніть увагу на крапку між символами, що представляють вектори)
\[\mathbf{u}\cdot \mathbf{v}=|\mathbf{u}||\mathbf{v}|\cos \theta \nonumber\]
де\(\theta\) - кут між векторами. Зверніть увагу, що точковий добуток дорівнює нулю, якщо два вектори перпендикулярні один одному, і дорівнює добутку їх абсолютних значень, якщо вони паралельні. Це легко довести, що
\[\mathbf{u}\cdot \mathbf{v}=u_xv_x+u_yv_y+u_zv_z \nonumber\]
Приклад\(\PageIndex{1}\)
Показати, що вектори
\[ \begin{align*} \mathbf{u_1} &=\dfrac{1}{\sqrt{3}}\hat{\mathbf{i}}+\dfrac{1}{\sqrt{3}}\hat{\mathbf{j}}+\dfrac{1}{\sqrt{3}}\hat{\mathbf{k}} \\[4pt] \mathbf{u_2} &=\dfrac{1}{\sqrt{6}}\hat{\mathbf{i}}-\dfrac{2}{\sqrt{6}}\hat{\mathbf{j}}+\dfrac{1}{\sqrt{6}}\hat{\mathbf{k}} \\[4pt] \mathbf{u_3} &=-\dfrac{1}{\sqrt{2}}\hat{\mathbf{i}}+\dfrac{1}{\sqrt{2}}\hat{\mathbf{k}} \end{align*} \nonumber\]
мають одиницю довжини і взаємно перпендикулярні.
Рішення
Довжина векторів:
\[ \begin{align*} |\mathbf{u_1}|&=\left[\left(\dfrac{1}{\sqrt{3}}\right)^2+\left(\dfrac{1}{\sqrt{3}}\right)^2+\left(\dfrac{1}{\sqrt{3}}\right)^2\right]^{1/2}=\left[\dfrac{1}{3}+\dfrac{1}{3}+\dfrac{1}{3}\right]^{1/2}=1 \\[4pt] |\mathbf{u_2}| &=\left[\left(\dfrac{1}{\sqrt{6}}\right)^2+\left(-\dfrac{2}{\sqrt{6}}\right)^2+\left(\dfrac{1}{\sqrt{6}}\right)^2\right]^{1/2}=\left[\dfrac{1}{6}+\dfrac{4}{6}+\dfrac{1}{6}\right]^{1/2}=1 \\[4pt] |\mathbf{u_3}| &=\left[\left(-\dfrac{1}{\sqrt{2}}\right)^2+\left(\dfrac{1}{\sqrt{2}}\right)^2\right]^{1/2}=\left[\dfrac{1}{2}+\dfrac{1}{2}\right]^{1/2}=1 \end{align*} \nonumber\]
Щоб перевірити, чи два вектори перпендикулярні, виконуємо крапковий добуток:
\[ \begin{align*} \mathbf{u_1}\cdot \mathbf{u_2}&=\left(\dfrac{1}{\sqrt{3}}\dfrac{1}{\sqrt{6}}-\dfrac{1}{\sqrt{3}}\dfrac{2}{\sqrt{6}}+\dfrac{1}{\sqrt{3}}\dfrac{1}{\sqrt{6}}\right)=0 \\[4pt] \mathbf{u_1}\cdot \mathbf{u_3} &=\left(-\dfrac{1}{\sqrt{3}}\dfrac{1}{\sqrt{2}}+\dfrac{1}{\sqrt{3}}\dfrac{1}{\sqrt{2}}\right)=0 \\[4pt] \mathbf{u_2}\cdot \mathbf{u_3} &=\left(-\dfrac{1}{\sqrt{6}}\dfrac{1}{\sqrt{2}}+\dfrac{1}{\sqrt{6}}\dfrac{1}{\sqrt{2}}\right)=0 \end{align*} \nonumber\]
Тому ми тільки що довели, що три пари взаємно перпендикулярні, а три вектори мають одиничну довжину. Іншими словами, ці вектори є векторами\(\hat{\mathbf{i}}\),\(\hat{\mathbf{j}}\) і\(\hat{\mathbf{k}}\) обертаються в просторі.
Якщо точковий добуток двох векторів (будь-якої розмірності) дорівнює нулю, ми говоримо, що два вектори ортогональні. Якщо вектори мають одиничну довжину, ми говоримо, що вони нормалізовані. Якщо два вектори є нормалізованими і вони ортогональні, ми говоримо, що вони ортонормальні. Набір векторів, показаний у попередньому прикладі, утворює ортонормальну множину. [vectors:orthonormal] Ці поняття також застосовуються до векторів, що містять складні записи, але як ми виконуємо точковий добуток у цьому випадку?
Загалом, квадрат модуля вектора дорівнює
\[|\mathbf{u}|^2=\mathbf{u}\cdot \mathbf{u}=u_x^2+u_y^2+u_z^2. \nonumber\]
Однак це не працює належним чином для складних векторів. Квадрат\(i\) дорівнює -1, це означає, що ми ризикуємо мати непозитивні абсолютні значення. Для вирішення цього питання введемо більш загальну версію точкового добутку:
\[\mathbf{u}\cdot \mathbf{v}=u_x^*v_x+u_y^*v_y+u_z^*v_z, \nonumber\]
де «\(*\)» відноситься до складного сполученого. Тому для обчислення модуля вектора,\(\mathbf{u}\) що має складні записи, використовуємо його складний сполучений:
\[|\mathbf{u}|^2=\mathbf{u}^*\cdot \mathbf{u} \nonumber\]
Приклад\(\PageIndex{2}\): Calculating the Modulus of a vector
Обчисліть модуль наступного вектора:
\[\mathbf{u}=\hat{\mathbf{i}}+i \hat{\mathbf{j}} \nonumber\]
Рішення
\[|\mathbf{u}|^2=\mathbf{u}^*\cdot \mathbf{u}=(\hat{\mathbf{i}}-i \hat{\mathbf{j}})(\hat{\mathbf{i}}+i \hat{\mathbf{j}})=(1)(1)+(-i)(i)=2\rightarrow |\mathbf{u}|=\sqrt{2} \nonumber\]
Аналогічно, якщо вектори містять складні записи, ми можемо перевірити, чи є вони ортогональними чи ні, перевіряючи точковий добуток\(\mathbf{u}^*\cdot \mathbf{v}\).
Приклад\(\PageIndex{3}\): Confirming orthogonality
Визначте, чи є наступна пара векторів ортогональними (не плутайте ірраціональне число\(i\) з одиничним вектором\(\hat{\mathbf{i}}\)!)
\[\mathbf{u}=\hat{\mathbf{i}}+(1-i)\hat{\mathbf{j}} \nonumber\]
і
\[\mathbf{v}=(1+i)\hat{\mathbf{i}}+\hat{\mathbf{j}} \nonumber\]
Рішення
\[\mathbf{u}^*\cdot \mathbf{v}=(\hat{\mathbf{i}}+(1+i)\hat{\mathbf{j}})((1+i)\hat{\mathbf{i}}+\hat{\mathbf{j}})=(1)(1+i)+(1+i)(1)=2+2i\neq 0 \nonumber\]
Тому вектори не ортогональні.
Векторний добуток
Векторний добуток двох векторів - вектор, який визначається як
\[\mathbf{u}\times \mathbf{v}=|\mathbf{u}| |\mathbf{v}| \mathbf{n} \sin\theta \nonumber\]
де\(\theta\) знову кут між двома векторами, і\(\mathbf{n}\) - одиничний вектор, перпендикулярний площині, утвореної\(\mathbf{u}\) і\(\mathbf{v}\). Напрямок вектора\(\mathbf{n}\) задається правилом правої руки. Простягніть праву руку і наведіть вказівний палець у напрямку\(\mathbf{u}\) (вектор на лівій стороні\(\times\) символу) і вказівним пальцем у напрямку\(\mathbf{v}\). Напрямок\(\mathbf{n}\), який визначає напрямок\(\mathbf{u}\times \mathbf{v}\), - це напрямок великого пальця. Якщо ви хочете повернути множення, і виконати\(\mathbf{v}\times \mathbf{u}\), вам потрібно вказати вказівний палець у напрямку,\(\mathbf{v}\) а вказівний палець у напрямку\(\mathbf{u}\) (все ще використовуючи праву руку!). Отриманий вектор буде вказувати в протилежну сторону (рис.\(\PageIndex{1}\)).
Величина\(\mathbf{u}\times \mathbf{v}\) - добуток величин окремих векторів разів\(\sin \theta\). Ця величина має цікаву геометричну інтерпретацію: це площа паралелограма, утворена двома векторами (рис.\(\PageIndex{1}\)).

Перехресний добуток також може бути виражений як детермінант:
\[\mathbf{u}\times \mathbf{v}= \begin{vmatrix} \hat{\mathbf{i}}&\hat{\mathbf{j}}&\hat{\mathbf{k}}\\ u_x&u_y&u_z\\ v_x&v_y&v_z\\ \end{vmatrix} \nonumber\]
Приклад\(\PageIndex{1}\):
Задано\(\mathbf{u}=-2 \hat{\mathbf{i}}+\hat{\mathbf{j}}+\hat{\mathbf{k}}\) і\(\mathbf{v}=3 \hat{\mathbf{i}}-\hat{\mathbf{j}}+\hat{\mathbf{k}}\), обчислити\(\mathbf{w}=\mathbf{u}\times \mathbf{v}\) і перевірити, що результат перпендикулярний обох\(\mathbf{u}\) і\(\mathbf{v}\).
Рішення
\[ \begin{align*} \mathbf{u}\times \mathbf{v} &= \begin{vmatrix} \hat{\mathbf{i}}&\hat{\mathbf{j}}&\hat{\mathbf{k}}\\ u_x&u_y&u_z\\ v_x&v_y&v_z\\ \end{vmatrix}=\begin{vmatrix} \hat{\mathbf{i}}&\hat{\mathbf{j}}&\hat{\mathbf{k}}\\ -2&1&1\\ 3&-1&1\\ \end{vmatrix} \\[4pt] &=\hat{\mathbf{i}}(1+1)-\hat{\mathbf{j}}(-2-3)+\hat{\mathbf{k}}(2-3) \\[4pt] &=\displaystyle{\color{Maroon}2 \hat{\mathbf{i}}+5 \hat{\mathbf{j}}-\hat{\mathbf{k}}} \end{align*} \nonumber\]
Щоб перевірити, що два вектори перпендикулярні, ми виконуємо крапковий добуток:
\[\mathbf{u} \cdot \mathbf{w}=(-2)(2)+(1)(5)+(1)(-1)=0 \nonumber\]
\[\mathbf{v} \cdot \mathbf{w}=(3)(2)+(-1)(5)+(1)(-1)=0 \nonumber\]
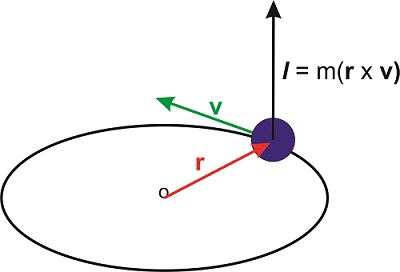
Важливе застосування перехресного виробу передбачає визначення моменту моменту. Якщо частка з масою\(m\) рухає швидкість\(\mathbf{v}\) (вектор), її (лінійний) імпульс дорівнює\(\mathbf{p}=m\mathbf{v}\). \(\mathbf{r}\)Дозволяти положення частинки (інший вектор), тоді кутовий момент частки визначається як
\[\mathbf{l}=\mathbf{r}\times\mathbf{p} \nonumber\]
Таким чином, кутовий імпульс є вектором, перпендикулярним обом\(\mathbf{r}\) і\(\mathbf{p}\). Оскільки положення частинки потрібно визначити щодо певного походження, це походження потрібно вказати при визначенні кутового моменту.
Векторна нормалізація
Вектор будь-якої заданої довжини можна розділити за модулем, щоб створити одиничний вектор (тобто вектор одиничної довжини). Ми побачимо застосування одиничних (або нормалізованих) векторів у наступному розділі.
Наприклад, вектор
\[\mathbf{u}=\hat{\mathbf{i}}+\hat{\mathbf{j}}+i\hat{\mathbf{k}} \nonumber\]
має величину:
\[|\mathbf{u}|^2=1^2+1^2+(-i)(i)=3\rightarrow |\mathbf{u}|=\sqrt{3} \nonumber\]
Тому для нормалізації цього вектора розділимо всі складові на його довжину:
\[\hat{\mathbf{u}}=\frac{1}{\sqrt{3}}\hat{\mathbf{i}}+\frac{1}{\sqrt{3}}\hat{\mathbf{j}}+\frac{i}{\sqrt{3}}\hat{\mathbf{k}} \nonumber\]
Зверніть увагу, що ми використовуємо «капелюх», щоб вказати, що вектор має одиницю довжини.
Потрібна допомога? Посилання нижче містять розв'язані приклади.
Операції з векторами: http://tinyurl.com/mw4qmz8
Зовнішні посилання:
- Точковий твір: http://patrickjmt.com/vectors-the-dot-product/
- Перехресний продукт: http://patrickjmt.com/the-cross-product/
- Точковий і хрестовий твір: http://www.youtube.com/watch?v=enr7JqvehJs