12.1: Вектори в площині
- Page ID
- 61592

- Опишіть плоский вектор, використовуючи правильні позначення.
- Виконуйте основні векторні операції (скалярне множення, додавання, віднімання).
- Висловіть вектор у вигляді компонента.
- Поясніть формулу величини вектора.
- Висловіть вектор через одиничні вектори.
- Наведіть два приклади векторних величин.
При описі руху літака в польоті важливо повідомити дві частини інформації: напрямок, в якому рухається літак і швидкість літака. При вимірюванні такої сили, як тяга двигунів літака, важливо описати не тільки силу цієї сили, але і напрямок, в якому вона застосовується. Деякі величини, такі як або сила, визначаються як розміром (також називається величиною), так і напрямком. Величина, яка має величину і напрямок, називається вектором. У підручниках вектори часто позначаються жирними літерами, такими як\(\mathbf{v}\). Оскільки важко писати чітким жирним шрифтом, коли ми пишемо вектори від руки, ми також включимо стрілку або гарпун над літерою, що представляє вектор. Щоб зробити вектори зрозумілішими в цьому підручнику (і посилити спосіб їх написання вручну), ми, як правило, будемо використовувати стрілки або гарпуни над жирними (або курсивними) літерами для представлення векторів, даючи нам\(\vec v\) або\(\vecs{v}\). Зауважте, що деякі цифри все одно використовуватимуть лише напівжирні літери для позначення векторів.
Вектор - це величина, яка має як величину, так і напрямок.
Векторне представлення
Вектор в площині представлений спрямованим відрізком лінії (стрілкою). Кінцеві точки відрізка називаються початковою точкою і кінцевою точкою вектора. Стрілка від початкової точки до кінцевої точки вказує напрямок вектора. Довжина відрізка лінії представляє його величину. Використовуємо позначення\(\|\vecs{v}\|\) для позначення величини вектора\(\vecs{v}\). Вектор з однаковою початковою і кінцевою точкою називається нульовим вектором, позначається\(\vecs{0}\). Нульовий вектор є єдиним вектором без напрямку, і за умовністю можна вважати, що має будь-який напрямок, зручний для задачі під рукою.
Вектори з однаковою величиною і напрямком називаються еквівалентними векторами. Ми розглядаємо еквівалентні вектори як рівні, навіть якщо вони мають різні початкові точки. Таким чином, якщо\(\vecs{v}\) і\(\vecs{w}\) еквівалентні, пишемо
\[\vecs{v}=\vecs{w}. \nonumber \]
Вектори, як кажуть, є еквівалентними векторами, якщо вони мають однакову величину і напрямок.
Стрілки на малюнку\(\PageIndex{1 (b)}\) рівнозначні. Кожна стрілка має однакову довжину і напрямок. Тісно пов'язаним поняттям є ідея паралельних векторів. Кажуть, що два вектори паралельні, якщо вони мають однакові або протилежні напрямки. Розглянемо цю ідею більш детально далі в розділі. Вектор визначається його величиною і напрямком, незалежно від того, де знаходиться його початкова точка.
Використання жирних, малих літер для іменування векторів є загальним поданням у друку, але є альтернативні позначення. При написанні імені вектора від руки, наприклад, простіше накидати стрілку над змінною, ніж показати це вектор:\(\vec{v}\). Коли вектор має початкову точку\(P\) та кінцеву точку\(Q\), позначення\(\vecd{PQ}\) корисне, оскільки воно вказує напрямок та розташування вектора.
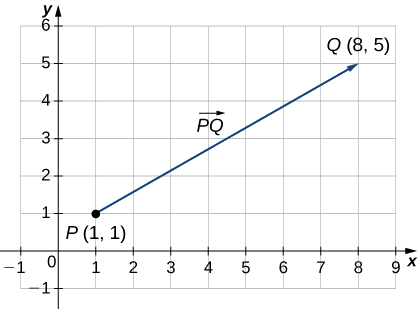
Намалюйте вектор на площині від початкової точки\(P(1,1)\) до кінцевої точки\(Q(8,5)\).
Рішення
Див\(\PageIndex{2}\). Малюнок. Тому що вектор йде від точки\(P\) до точки\(Q\), ми називаємо його\(\vecd{PQ}\).
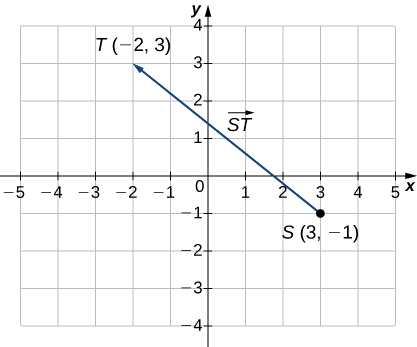
Намалюйте вектор\(S\),\(\vecd{ST}\) де точка\((3,−1)\) і\(T\) точка\((−2,3).\)
- Підказка
-
Перша точка, вказана в назві вектора, є початковою точкою вектора.
- Відповідь
-
Поєднання векторів
Вектори мають багато реальних застосувань, включаючи ситуації, пов'язані з силою або швидкістю. Наприклад, розглянемо сили, що діють на човні, що перетинає річку. Мотор човна генерує силу в одному напрямку, а протягом річки генерує силу в іншому напрямку. Обидві сили є векторами. Ми повинні враховувати як величину, так і напрямок кожної сили, якщо хочемо знати, куди піде човен.
Другий приклад, який включає вектори є захисник кидає футбол. Квотербек не кидати м'яч паралельно землі; замість цього, він спрямований вгору в повітря. Швидкість його кидка може бути представлена вектором. Якщо ми знаємо, наскільки сильно він кидає м'яч (величина - в даному випадку швидкість) і кут (напрямок), ми можемо сказати, як далеко м'яч пройде вниз по полю.
Справжнє число часто називають скалярним в математиці і фізиці. На відміну від векторів, скаляри, як правило, вважають, що мають лише величину, але не напрямок. Множення вектора на скаляр змінює величину вектора. Це називається скалярним множенням. Зверніть увагу, що зміна величини вектора не вказує на зміну його напрямку. Наприклад, вітер, що дме з півночі на південь, може збільшуватися або зменшуватися, зберігаючи свій напрямок з півночі на південь.
\(k\vecs{v}\)Добуток вектора\(\vecs{v}\) і скаляра\(k\) - це вектор з величиною, яка в\(|k|\) рази перевищує величину\(\vecs{v}\), і з напрямком, який збігається з напрямком\(\vecs{v}\) if\(k>0\), і протилежним напрямку\(\vecs{v}\) if\(k<0\). Це називається скалярним множенням. Якщо\(k=0\) або\(\vecs{v}=\vecs{0}\), то\(k\vecs{v}=\vecs{0}.\)
Як і слід було очікувати, якщо\(k=−1\), ми позначимо продукт\(k\vecs{v}\) як
\[k\vecs{v}=(−1)\vecs{v}=−\vecs{v}. \nonumber \]
Зверніть увагу, що\(−\vecs{v}\) має таку ж величину\(\vecs{v}\), що і, але має зворотний напрямок (рис.\(\PageIndex{3}\)).
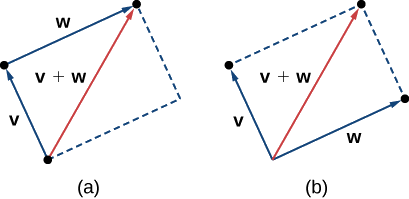
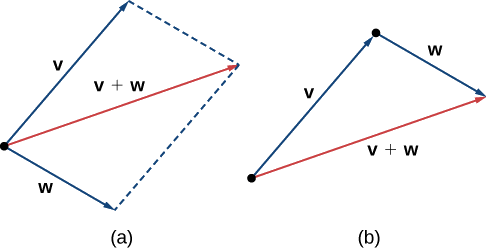
Ще одна операція, яку ми можемо виконати над векторами, полягає в тому, щоб скласти їх разом у векторному додаванні, але оскільки кожен вектор може мати свій напрямок, процес відрізняється від додавання двох чисел. Найпоширенішим графічним методом додавання двох векторів є розміщення початкової точки другого вектора в кінцевій точці першого, як на малюнку\(\PageIndex{4 (a)}\). Щоб зрозуміти, чому це має сенс, припустимо, наприклад, що обидва вектори представляють зміщення. Якщо об'єкт рухається спочатку від початкової точки до кінцевої точки вектора\(\vecs{v}\), потім від початкової точки до кінцевої точки вектора\(\vecs{w}\), загальне зміщення таке ж, як якби об'єкт здійснив лише один рух від початкової точки до кінцевої точки вектора \(\vecs{v}+\vecs{w}\). Зі зрозумілих причин такий підхід називається методом трикутника. Зверніть увагу, що якби ми переключили порядок, так що це\(\vecs{w}\) був наш перший вектор і\(\vecs{v}\) був наш другий вектор, ми б опинилися в тому ж місці. (Знову див\(\PageIndex{4 (a)}\). Рис.) Таким чином,
\[ \vecs{v}+ \vecs{w}= \vecs{w}+ \vecs{v}. \nonumber \]
Другий метод додавання векторів називається методом паралелограма. За допомогою цього методу ми розміщуємо два вектори так, щоб вони мали однакову початкову точку, а потім малюємо паралелограм з векторами як дві сусідні сторони, як на малюнку\(\PageIndex{4 (b)}\). Довжина діагоналі паралелограма - це сума. Порівнюючи\(\PageIndex{4 (b)}\) Figure і Figure\(\PageIndex{4 (a)}\), ми бачимо, що отримуємо однакову відповідь, використовуючи будь-який метод. Вектор\( \vecs{v}+ \vecs{w}\) називається векторною сумою.
Сума двох векторів\(\vecs{v}\) і\(\vecs{w}\) може бути побудована графічно, розмістивши початкову точку\(\vecs{w}\) в кінцевій точці\(\vecs{v}\). Потім, векторна сума\(\vecs{v}+\vecs{w}\), - це вектор з початковою точкою, яка збігається з початковою точкою\(\vecs{v}\) і має кінцеву точку, яка збігається з кінцевою точкою\(\vecs{w}\). Ця операція відома як векторне додавання.
Тут також доречно обговорити векторне віднімання. Визначаємо\(\vecs{v}−\vecs{w}\) як\(\vecs{v}+(−\vecs{w})=\vecs{v}+(−1)\vecs{w}\). Вектор\(\vecs{v}−\vecs{w}\) називається різницею векторів. Графічно вектор\(\vecs{v}−\vecs{w}\) зображується шляхом малювання вектора від кінцевої точки\(\vecs{w}\) до кінцевої точки\(\vecs{v}\) (рис.\(\PageIndex{5}\)).
На\(\PageIndex{4 (a)}\) малюнку початковою точкою\(\vecs{v}+\vecs{w}\) є початкова точка\(\vecs{v}\). Кінцева точка\(\vecs{v}+\vecs{w}\) є кінцевою точкою\(\vecs{w}\). Ці три вектори утворюють сторони трикутника. Звідси випливає, що довжина будь-якої однієї сторони менше суми довжин інших сторін. Отже, у нас є
\[\|\vecs{v}+\vecs{w}\|≤\|\vecs{v}\|+\|\vecs{w}\|. \nonumber \]
Це більш широко відомо як нерівність трикутника. Однак є один випадок, коли результуючий вектор\(\vecs{u}+\vecs{v}\) має таку ж величину, як і сума величин\(\vecs{u}\) і\(\vecs{v}\). Це відбувається тільки тоді, коли\(\vecs{u}\) і\(\vecs{v}\) мають однаковий напрямок.
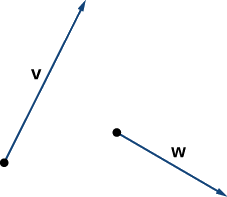
Враховуючи вектори\(\vecs{v}\) і\(\vecs{w}\) показані на малюнку\(\PageIndex{6}\), намалюйте вектори
- \(3\vecs{w}\)
- \(\vecs{v}+\vecs{w}\)
- \(2\vecs{v}−\vecs{w}\)
Рішення
a Вектор\(3\vecs{w}\) має той самий напрямок, що і\(\vecs{w}\); він втричі довший, ніж\(\vecs{w}\).
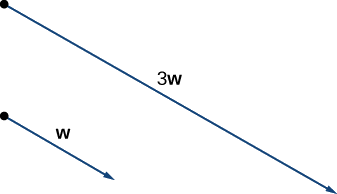
Вектор\(3\vecs{w}\) має такий же напрямок, як\(\vecs{w}\) і в три рази довше.
б Використовуйте будь-який метод додавання, щоб знайти\(\vecs{v}+\vecs{w}\).
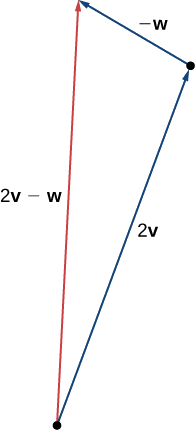
c Щоб знайти\(2\vecs{v}−\vecs{w}\), ми можемо спочатку переписати вираз як\(2\vecs{v}+(−\vecs{w})\). Потім ми можемо намалювати вектор\(−\vecs{w}\), а потім додати його до вектора\(2\vecs{v}\).
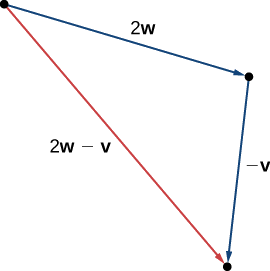
Використовуючи вектори\(\vecs{v}\) та\(\vecs{w}\) з\(\PageIndex{2}\) Example, намалюйте вектор\(2\vecs{w}−\vecs{v}\).
- Підказка
-
Перший ескіз векторів\(2\vecs{w}\) і\(−\vecs{v}\).
- Відповідь
-
Векторні компоненти
Працювати з векторами в площині простіше, коли ми працюємо в системі координат. Коли початкові точки та кінцеві точки векторів задані в декартових координатах, обчислення стають прямими.
Є\(\vecs{v}\) і\(\vecs{w}\) еквівалентні вектори?
а.
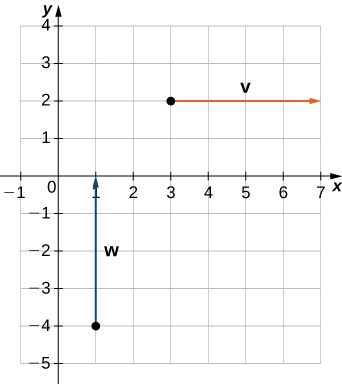
- \(\vecs{v}\)має початкову точку\((3,2)\) та кінцеву точку\((7,2)\)
- \(\vecs{w}\)має початкову точку\((1,−4)\) та кінцеву точку\((1,0)\)
б.
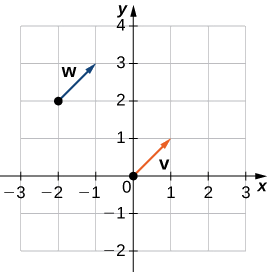
- \(\vecs{v}\)має початкову точку\((0,0)\) та кінцеву точку\((1,1)\)
- \(\vecs{w}\)має початкову точку\((−2,2)\) та кінцеву точку\((−1,3)\)
Рішення
а Вектори - це кожна\(4\) одиниця довжини, але вони орієнтовані в різні боки. Так\(\vecs{v}\) і не\(\vecs{w}\) рівнозначні (рис.\(\PageIndex{9}\)).
б Виходячи з малюнка\(\PageIndex{10}\), і використовуючи трохи геометрії, зрозуміло, що ці вектори мають однакову довжину і однаковий напрямок, тому\(\vecs{v}\) і\(\vecs{w}\) еквівалентні.
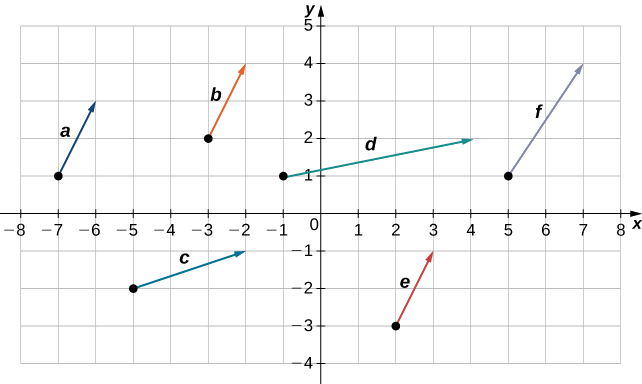
Які з наступних векторів еквівалентні?
- Підказка
-
Еквівалентні вектори мають однакову величину і однаковий напрямок.
- Відповідь
-
Вектори\(\vecs{a}, \vecs{b}\), і\(\vecs{e}\) еквівалентні.
Ми бачили, як побудувати вектор, коли нам дають початкову точку та кінцеву точку. Однак, оскільки вектор може бути розміщений в будь-якому місці площини, може бути простіше виконати обчислення з вектором, коли його початкова точка збігається з початковою точкою. Вектор з початковою точкою в початковій точці ми називаємо вектором стандартної позиції. Оскільки початкова точка будь-якого вектора в стандартному положенні, як відомо\((0,0)\), ми можемо описати вектор, дивлячись на координати його кінцевої точки. Таким чином, якщо вектор\(\vecs{v}\) має свою початкову точку на початку та кінцеву точку,\((x,y),\) ми запишемо вектор у вигляді компонента як
\[\vecs{v}=⟨x,y⟩. \nonumber \]
Коли вектор записується у вигляді компонента, подібного до цього, скаляри x і y називаються складовими\(\vecs{v}\).
Вектор з початковою точкою\((0,0)\) та кінцевою точкою\((x,y)\) можна записати у вигляді компонента як
\[\vecs{v}=⟨x,y⟩. \nonumber \]
Скаляри\(x\) і\(y\) називаються складовими\(\vecs{v}\).
Нагадаємо, що вектори називаються малими літерами жирним шрифтом або шляхом малювання стрілки над їх назвою. Ми також дізналися, що ми можемо назвати вектор за його складовою формою, з координатами його кінцевої точки в кутових дужках. Однак при написанні складової форми вектора важливо розрізняти\(⟨x,y⟩\) і\((x,y)\). Перша впорядкована пара використовує кутові дужки для опису вектора, тоді як друга використовує дужки для опису точки в площині. Початкова точка\(⟨x,y⟩\) є\((0,0)\); кінцева точка\(⟨x,y⟩\) є\((x,y)\).
Коли у нас вектор ще не знаходиться в стандартному положенні, ми можемо визначити його складову форму одним з двох способів. Ми можемо використовувати геометричний підхід, при якому ми накидаємо вектор в координатній площині, а потім ескізуємо еквівалентний вектор стандартного положення. Крім того, ми можемо знайти його алгебраїчно, використовуючи координати початкової точки та кінцевої точки. Щоб знайти його алгебраїчно, ми віднімаємо\(x\) -координату початкової точки з\(x\) -координати кінцевої точки, щоб отримати\(x\) -компонент, і віднімаємо\(y\) -координату початкової точки з\(y\) -координати кінцевої точки, щоб отримати\(y\) -компонентний.
\(\vecs{v}\)Дозволяти вектор з початковою точкою\((x_i,y_i)\) та кінцевою точкою\((x_t,y_t)\). Тоді ми можемо висловити\(\vecs{v}\) в складовій формі як\(\vecs{v}=⟨x_t−x_i,y_t−y_i⟩\).
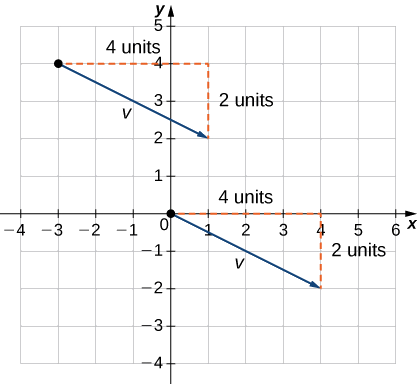
Експрес-вектор\(\vecs{v}\) з початковою точкою\((−3,4)\) та кінцевою точкою\((1,2)\) у вигляді компонента.
Рішення:
a. геометричні
1. Намалюйте вектор в координатній площині (рис.\(\PageIndex{11}\)).
2. Кінцева точка - 4 одиниці вправо і 2 одиниці вниз від початкової точки.
3. Знайдіть точку, яка становить 4 одиниці праворуч і 2 одиниці вниз від початку.
4. У стандартному положенні цей вектор має початкову точку\((0,0)\) та кінцеву точку\((4,−2)\):
\(\vecs{v}=⟨4,−2⟩.\)
б. алгебраїчна
У першому рішенні ми використовували ескіз вектора, щоб побачити, що кінцева точка лежить на 4 одиницях праворуч. Ми можемо досягти цього алгебраїчно, знайшовши різницю в\(x\) -координатах:
\(x_t−x_i=1−(−3)=4.\)
Аналогічно різниця\(y\) -координат показує вертикальну довжину вектора.
\(y_t−y_i=2−4=−2.\)
Отже, в складовій формі,
\(\vecs{v}=⟨x_t−x_i,y_t−y_i⟩=⟨1−(−3),2−4⟩=⟨4,−2⟩.\)
Вектор\(\vecs{w}\) має початкову точку\((−4,−5)\) та кінцеву точку\((−1,2)\). Експрес\(\vecs{w}\) в складовій формі.
- Підказка
-
Ви можете використовувати геометричний або алгебраїчний метод.
- Відповідь
-
\(⟨3,7⟩\)
Щоб знайти величину вектора, обчислюємо відстань між його початковою точкою та кінцевою точкою. Величина вектора\(\vecs{v}=⟨x,y⟩\) позначається\(\|\vecs{v}\|,\) або\(|\vecs{v}|\), і може бути обчислена за формулою
\[\|\vecs{v}\|=\sqrt{x^2+y^2}. \nonumber \]
Зауважте, що оскільки цей вектор записаний у вигляді компонента, він еквівалентний вектору в стандартному положенні, з початковою точкою в початковій та кінцевій точці\((x,y)\). Таким чином, досить обчислити величину вектора в стандартному положенні. Використовуючи формулу відстані для обчислення відстані між початковою точкою\((0,0)\) та кінцевою точкою\((x,y)\), ми маємо
\[\|\vecs{v}\|=\sqrt{(x−0)^2+(y−0)^2}=\sqrt{x^2+y^2}. \nonumber \]
Виходячи з цієї формули, зрозуміло, що для будь-якого вектора\(\vecs{v}, \|\vecs{v}\|≥0,\) і\(\|\vecs{v}\|=0\) якщо і тільки якщо\(\vecs{v}=\vecs{0}\).
Величина вектора також може бути виведена за допомогою теореми Піфагора, як на наступному малюнку.
Визначено скалярне множення та векторне додавання геометрично. Експресія векторів у компонентній формі дозволяє нам виконувати ці самі операції алгебраїчно.
\(\vecs{v}=⟨x_1,y_1⟩\)\(\vecs{w}=⟨x_2,y_2⟩\)Дозволяти і бути вектори, і нехай\(k\) бути скалярним.
- Скалярне множення:\[k\vecs{v}=⟨kx_1,ky_1⟩ \nonumber \]
- Векторне додавання:\[\vecs{v}+\vecs{w}=⟨x_1,y_1⟩+⟨x_2,y_2⟩=⟨x_1+x_2,y_1+y_2⟩ \nonumber \]
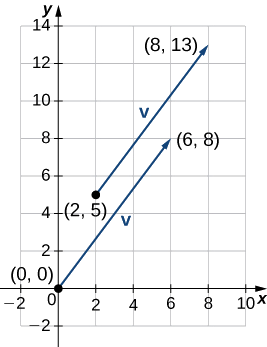
\(\vecs{v}\)Дозволяти вектор з початкової точки\((2,5)\) і кінцевої точки\((8,13)\), і нехай\(\vecs{w}=⟨−2,4⟩\).
- \(\vecs{v}\)Висловіть у складовій формі і знайдіть\(\|\vecs{v}\|\). Потім, використовуючи алгебру, знайдіть
- \(\vecs{v}+\vecs{w}\),
- \(3\vecs{v}\), і
- \(\vecs{v}−2\vecs{w}\).
Рішення
а. щоб помістити початкову точку\(\vecs{v}\) на початку, ми повинні перевести вектор на 2 одиниці вліво і 5 одиниць вниз (рис.\(\PageIndex{13}\)). Використовуючи алгебраїчний метод, ми можемо висловити\(\vecs{v}\) як\(\vecs{v}=⟨8−2,13−5⟩=⟨6,8⟩\):
\(\|\vecs{v}\|=\sqrt{6^2+8^2}=\sqrt{36+64}=\sqrt{100}=10\).
b. щоб знайти\(\vecs{v}+\vecs{w}\), додайте\(x\) -компоненти та\(y\) -компоненти окремо:
\(\vecs{v}+\vecs{w}=⟨6,8⟩+⟨−2,4⟩=⟨4,12⟩.\)
с. щоб знайти\(3\vecs{v}\),\(\vecs{v}\) помножте на скаляр\(k=3\):
\(3\vecs{v}=3⋅⟨6,8⟩=⟨3⋅6,3⋅8⟩=⟨18,24⟩.\)
d. знайти\(\vecs{v}−2\vecs{w}\), знайти\(−2\vecs{w}\) і додати його в\(\vecs{v}:\)
\(\vecs{v}−2\vecs{w}=⟨6,8⟩−2⋅⟨−2,4⟩=⟨6,8⟩+⟨4,−8⟩=⟨10,0⟩.\)
Дозволяти\(\vecs{a}=⟨7,1⟩\) і\(\vecs{b}\) нехай вектор з початковою точкою\((3,2)\) і кінцевою точкою\((−1,−1).\)
- Знайти\(\|\vecs{a}\|\).
- Експрес\(\vecs{b}\) в складовій формі.
- Знайти\(3\vecs{a}−4\vecs{b}.\)
- Підказка
-
Використовуйте теорему Піфагора, щоб знайти\(\|\vecs{a}\|\). Щоб знайти\(3\vecs{a}−4\vecs{b}\), почніть з знаходження скалярних кратних\(3\vecs{a}\) і\(−4\vecs{b}\).
- Відповідь
-
\(\|\vecs{a}\|=5\sqrt{2},\)
- Відповідь б
-
\(\vecs{b}=⟨−4,−3⟩,\)
- Відповідь c
-
\(3\vecs{a}−4\vecs{b}=⟨37,15⟩\)
Тепер, коли ми встановили основні правила векторної арифметики, ми можемо констатувати властивості векторних операцій. Ми доведемо два цих властивості. Інші можуть бути доведені подібним чином.
Дозволяти\(\vecs{u}, \, \vecs{v}\), і\(\vecs{w}\) бути вектори в площині. \(s\)Дозволяти\(r\) і бути скалярами.
- Комутативне майно\[\vecs{u}+\vecs{v}=\vecs{v}+\vecs{u} \label{commutative} \]
- Асоціативна властивість\[(\vecs{u}+\vecs{v})+\vecs{w}=\vecs{u}+(\vecs{v}+\vecs{w}) \nonumber \]
- Властивість адитивної ідентичності\[\vecs{u}+\vecs{0}=\vecs{u} \nonumber \]
- Адитивна зворотна властивість\[\vecs{u}+(−\vecs{u})=\vecs{0} \nonumber \]
- Асоціативність скалярного множення\[r(s\vecs{u})=(rs)\vecs{u} \nonumber \]
- Розподільна власність\[(r+s)\vecs{u}=r\vecs{u}+s\vecs{u} \label{Distributive} \]
- Розподільна власність\[r(\vecs{u}+\vecs{v})=r\vecs{u}+r\vecs{v} \nonumber \]
- Ідентичність і нульові властивості\[1\vecs{u}=\vecs{u}, \, 0\vecs{u}=\vecs{0} \nonumber \]
Дозвольте\(\vecs{u}=⟨x_1,y_1⟩\) і\(\vecs{v}=⟨x_2,y_2⟩.\) застосовуйте комутативне властивість для дійсних чисел:
\[ \begin{align*} \vecs{u}+\vecs{v} =⟨x_1+x_2,y_1+y_2⟩ \\[4pt] = ⟨x_2+x_1,y_2+y_1⟩ \\[4pt] = \vecs{v}+\vecs{u}. \end{align*}\]
□
Застосовуємо розподільну властивість для дійсних чисел:
\[ \begin{align*} r(\vecs{u}+\vecs{v}) =r⋅⟨x_1+x_2,y_1+y_2⟩ \\[4pt] =⟨r(x_1+x_2),r(y_1+y_2)⟩ \\[4pt] = ⟨rx_1+rx_2,ry_1+ry_2⟩ \\[4pt] = ⟨rx_1,ry_1⟩+⟨rx_2,ry_2⟩ \\[4pt] = r\vecs{u}+r\vecs{v}. \end{align*}\]
□
Доведіть адитивну обернену властивість.
- Підказка
-
Використовуйте складову форму векторів.
Ми знайшли складові вектора за його початковою та кінцевою точками. У деяких випадках ми можемо мати лише величину та напрямок вектора, а не точки. Для цих векторів ми можемо визначити горизонтальну і вертикальну складові за допомогою тригонометрії (рис.\(\PageIndex{14}\)).
Розглянемо кут,\(θ\) утворений вектором\(\vecs{v}\) і позитивною\(x\) -віссю. З трикутника ми бачимо, що\(\vecs{v}\) складові вектора\(⟨\|\vecs{v}\| \cos{θ}, \, \|\vecs{v}\| \sin {θ}⟩\). Тому, враховуючи кут і величину вектора, ми можемо використовувати косинус і синус кута, щоб знайти складові вектора.
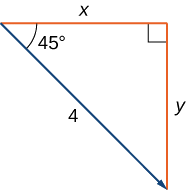
Знайти складову форму вектора з величиною 4, яка утворює кут\(−45°\) з\(x\) віссю -.
Рішення
\(x\)Дозволити і\(y\) представляти складові вектора (рис.\(\PageIndex{15}\)). Потім\(x=4 \cos(−45°)=2 \sqrt{2}\) і\(y=4 \sin(−45°)=−2\sqrt{2}\). Компонентною формою вектора є\(⟨2\sqrt{2},−2\sqrt{2}⟩\).
Знайти складову форму вектора\(\vecs{v}\) з величиною 10, яка утворює кут з\(120°\) додатною\(x\) - віссю.
- Підказка
-
\(x=\|\vecs{v}\| \cos θ\)і\(y=\|\vecs{v}\| \sin θ\)
- Відповідь
-
\(\vecs v=⟨−5,5\sqrt{3}⟩\)
Одиниця Вектори
Одиничний вектор - це вектор з величиною\(1\). Для будь-якого ненульового вектора ми можемо використовувати скалярне множення\(\vecs{v}\), щоб знайти одиничний вектор\(\vecs{u}\), який має той самий напрямок, що і\(\vecs{v}\). Для цього множимо вектор на зворотну його величині:
\[\vecs{u}=\dfrac{1}{\|\vecs{v}\|} \vecs{v}. \nonumber \]
Нагадаємо, що коли ми визначили скалярне множення, ми зазначили, що\(\|k\vecs{v}\| =|k|⋅\|\vecs{v}\| \). Бо\(\vecs{u}=\dfrac{1}{\|\vecs{v}\| }\vecs{v}\), з цього випливає\(\|\vecs{u}\| =\dfrac{1}{\|\vecs{v}\| }(\|\vecs{v}\| )=1\). Ми говоримо, що\(\vecs{u}\) це одиничний вектор в напрямку\(\vecs{v}\) (рис.\(\PageIndex{16}\)). Процес використання скалярного множення для знаходження одиничного вектора із заданим напрямком називається нормалізацією.
Нехай\(\vecs{v}=⟨1,2⟩\).
- Знайдіть одиничний вектор з тим же напрямком, що і\(\vecs{v}\).
- Знайдіть вектор\(\vecs{w}\) з таким же напрямком, як\(\vecs{v}\) такий, що\(\|\vecs{w}\|=7\).
Рішення:
а. спочатку знайдіть величину\(\vecs{v}\), потім розділіть складові\(\vecs{v}\) на величину:
\[\|\vecs{v}\|=\sqrt{1^2+2^2}=\sqrt{1+4}=\sqrt{5} \nonumber \]
\[\vecs{u}=\dfrac{1}{\|\vecs{v}\|}\vecs{v}=\dfrac{1}{\sqrt{5}}⟨1,2⟩=⟨\dfrac{1}{\sqrt{5}},\dfrac{2}{\sqrt{5}}⟩ \nonumber. \nonumber \]
б. вектор\(\vecs{u}\) знаходиться в тому ж напрямку, що\(\vecs{v}\) і\(\|\vecs{u}\|=1\). Використовуйте скалярне множення, щоб збільшити довжину\(\vecs{u}\) без зміни напрямку:
\[\vecs{w}=7\vecs{u}=7⟨\dfrac{1}{\sqrt{5}},\dfrac{2}{\sqrt{5}}⟩=⟨\dfrac{7}{\sqrt{5}},\dfrac{14}{\sqrt{5}}⟩ \nonumber. \nonumber \]
Нехай\(\vecs{v}=⟨9,2⟩\). Знайти вектор з величиною\(5\) в протилежному напрямку як\(\vecs{v}\).
- Підказка
-
Спочатку знайдіть одиничний вектор в тому ж напрямку, що і\(\vecs{v}\).
- Відповідь
-
\(⟨−\dfrac{45}{\sqrt{85}},−\dfrac{10}{\sqrt{85}}⟩\)
Ми бачили, наскільки зручно може бути написання вектора в компонентному вигляді. Іноді, правда, зручніше писати вектор у вигляді суми горизонтального вектора і вертикального вектора. Щоб зробити це простіше, давайте розглянемо стандартні одиничні вектори. Стандартними одиничними векторами є вектори\(\hat{\mathbf i}=⟨1,0⟩\) і\(\hat{\mathbf j}=⟨0,1⟩\) (рис.\(\PageIndex{17}\)).
Застосовуючи властивості векторів, можна висловити будь-який вектор через\(\hat{\mathbf i}\) і\(\hat{\mathbf j}\) в тому, що ми називаємо лінійною комбінацією:
\[\vecs{v}=⟨x,y⟩=⟨x,0⟩+⟨0,y⟩=x⟨1,0⟩+y⟨0,1⟩=x\hat{\mathbf i}+y\hat{\mathbf j}. \nonumber \]
Таким чином,\(\vecs{v}\) це сума горизонтального вектора з величиною\(x\), і вертикального вектора з величиною\(y\), як на малюнку\(\PageIndex{18}\).
- Висловіть вектор\(\vecs{w}=⟨3,−4⟩\) через стандартні одиничні вектори.
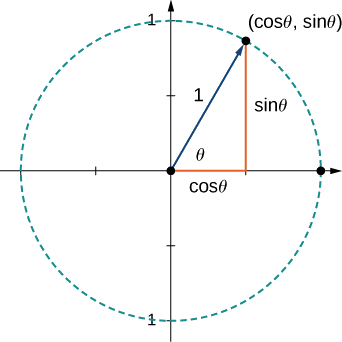
- Вектор\(\vecs{u}\) - це одиничний вектор, який утворює кут\(60°\) з додатною\(x\) -віссю. Використовуйте стандартні одиничні вектори для опису\(\vecs{u}\).
Рішення:
a. розв'язати вектор\(\vecs{w}\) у вектор з нульовим\(y\) -компонентом і вектор з нульовим\(x\) -компонентом:
\[\vecs{w}=⟨3,−4⟩=3 \hat{\mathbf i}−4 \hat{\mathbf j}. \nonumber \]
б. оскільки\(\vecs{u}\) є одиничним вектором, кінцева точка лежить на одиничному колі, коли вектор розміщений в стандартному положенні (рис.\(\PageIndex{19}\)).
\[ \begin{align*} \vecs{u} =⟨\cos 60°,\sin 60°⟩ \\[4pt] =⟨\dfrac{1}{2},\dfrac{\sqrt{3}}{2}⟩ \\[4pt] = \dfrac{1}{2} \hat{\mathbf i}+\dfrac{\sqrt{3}}{2} \hat{\mathbf j}. \end{align*}\]
Дозволяти\(\vecs{a}=⟨16,−11⟩\) і нехай\(\vecs{b}\) бути одиничний вектор, який утворює кут\(225°\) з позитивним\(x\) -вісь. Експрес\(\vecs{a}\) і\(\vecs{b}\) в терміні стандартних одиничних векторів.
- Підказка
-
Використовуйте синус і косинус, щоб знайти компоненти\(\vecs{b}\).
- Відповідь
-
\(\vecs{a}=16 \hat{\mathbf i}−11 \hat{\mathbf j}, \quad \vecs{b}=−\dfrac{\sqrt{2}}{2} \hat{\mathbf i}−\dfrac{\sqrt{2}}{2} \hat{\mathbf j}\)
Застосування векторів
Оскільки вектори мають як напрямок, так і величину, вони є цінними інструментами для вирішення проблем, пов'язаних з такими додатками, як рух і сила. Згадаймо приклад човна і приклад захисника, який ми описали раніше. Тут ми детально розглянемо два інших приклади.
Машина Джейн застрягла в бруді. Ліза і Джед приїжджають у вантажівці, щоб допомогти витягнути її. Вони прикріплюють один кінець буксирного ременя до передньої частини автомобіля, а інший кінець - до причіпного пристрою вантажівки, і вантажівка починає тягнути. Тим часом Джейн і Джед сідають за машину і штовхають. Вантажівка генерує горизонтальну силу 300 фунтів на автомобіль. Джейн і Джед штовхають під невеликим кутом вгору і генерують силу 150 фунтів на автомобіль. Ці сили можуть бути представлені векторами, як показано на малюнку\(\PageIndex{20}\). Кут між цими векторами дорівнює 15°. Знайдіть результуючу силу (суму вектора) і дайте її величину до найближчої десятої частини фунта і кута її напрямку від позитивної\(x\) -осі.
Рішення
Щоб знайти ефект об'єднання двох сил, додайте їх репрезентативні вектори. По-перше, висловіть кожен вектор в складовій формі або через стандартні одиничні вектори. Для цього найпростіше, якщо вирівняти один з векторів з позитивною\(x\) -віссю. Тоді горизонтальний вектор має початкову точку\((0,0)\) та кінцеву точку\((300,0)\). Вона може виражатися як\(⟨300,0⟩\) або\(300 \hat{\mathbf i}\).
Другий вектор має величину\(150\) і робить кут\(15°\) з першим, тому ми можемо висловити його як\(⟨150 \cos(15°),150 \sin(15°)⟩,\) або\(150 \cos(15°)\hat{\mathbf i}+150 \sin(15°)\hat{\mathbf j}\). Тоді сума векторів, або результуючий вектор, є\(\vecs{r}=⟨300,0⟩+⟨150 \cos(15°),150 \sin(15°)⟩,\) і ми маємо
\[\|\vecs{r}\|=\sqrt{(300+150 \cos(15°))^2+(150 \sin(15°))^2}≈446.6. \nonumber \]
Кут,\(θ\) зроблений\(\vecs{r}\) і позитивний\(x\) -вісь має\(\tan θ=\dfrac{150 \sin 15°}{(300+150\cos 15°)}≈0.09\), так\(θ≈ \tan^{−1}(0.09)≈5°\), що означає, що результуюча сила\(\vecs{r}\) має кут\(5°\) вище горизонтальної осі.
Літак летить через захід зі швидкістю повітря\(425\) миль/год. Вітер дме з північного сходу на\(40\) милі/год. Яка наземна швидкість літака? Що таке підшипник літака?
Рішення
Почнемо з ескізу описаної ситуації (рис.\(\PageIndex{21}\)).
Налаштуйте ескіз так, щоб початкові точки векторів лежали біля початку. Потім вектор швидкості площини є\(\vecs{p}=−425\hat{\mathbf i}\). Вектор, що описує вітер, робить кут з\(225°\) додатною\(x\) -віссю:
\[\vecs{w}=⟨40 \cos(225°),40 \sin(225°)⟩=⟨−\dfrac{40}{\sqrt{2}},−\dfrac{40}{\sqrt{2}}⟩=−\dfrac{40}{\sqrt{2}}\hat{\mathbf i}−\dfrac{40}{\sqrt{2}}\hat{\mathbf j}. \nonumber \]
Коли швидкість повітря і вітер діють разом на площині, ми можемо додати їх вектори, щоб знайти результуючу силу:
\[\vecs{p}+\vecs{w}=−425\hat{\mathbf i}+(−\dfrac{40}{\sqrt{2}}\hat{\mathbf i}−\dfrac{40}{\sqrt{2}}\hat{\mathbf j})=(−425−\dfrac{40}{\sqrt{2}})\hat{\mathbf i}−\dfrac{40}{\sqrt{2}}\hat{\mathbf j}. \nonumber \]
Величина результуючого вектора показує вплив вітру на наземну швидкість літака:
\(\|\vecs{p}+\vecs{w}\|=\sqrt{(−425−\dfrac{40}{\sqrt{2}})^2+(−\dfrac{40}{\sqrt{2}})^2}≈454.17\)миль/год
В результаті вітру літак рухається приблизно зі швидкістю\(454\) миль/год щодо землі.
Щоб визначити підшипник літака, хочемо знайти напрямок вектора\(\vecs{p}+\vecs{w}\):
\(\tan θ=\dfrac{−\dfrac{40}{\sqrt{2}}}{(−425−\dfrac{40}{\sqrt{2}})}≈0.06\)
\(θ≈3.57°\).
Загальний напрямок літака знаходиться на\(3.57°\) південь від заходу.
Літак летить через північ зі швидкістю польоту\(550\) миль/год. Вітер дме з північного заходу на\(50\) милі/год. Яка наземна швидкість літака?
- Підказка
-
Намалюйте вектори з однаковою початковою точкою і знайдіть їх суму.
- Відповідь
-
Приблизно\(516\) миль/год
Ключові поняття
- Вектори використовуються для представлення величин, які мають як величину, так і напрямок.
- Ми можемо додати вектори за допомогою методу паралелограма або методу трикутника, щоб знайти суму. Ми можемо помножити вектор на скаляр, щоб змінити його довжину або дати йому протилежний напрямок.
- Віднімання векторів визначено в терміні додавання негативу вектора.
- Вектор записується у вигляді компонента як\(\vecs{v}=⟨x,y⟩\).
- Величина вектора скалярна:\(‖\vecs{v}‖=\sqrt{x^2+y^2}\).
- Одиничний вектор\(\vecs{u}\) має величину\(1\) і його можна знайти шляхом ділення вектора на його величину:\(\vecs{u}=\dfrac{1}{‖\vecs{v}‖}\vecs{v}\). Стандартними одиничними векторами є\(\hat{\mathbf i}=⟨1,0⟩\) і\(\hat{\mathbf j}=⟨0,1⟩\). Вектор\(\vecs{v}=⟨x,y⟩\) може бути виражений через стандартні одиничні вектори як\(\vecs{v}=x\hat{\mathbf i}+y\hat{\mathbf j}\).
- Вектори часто використовуються у фізиці та техніці для представлення сил та швидкостей, серед інших величин.
Глосарій
- складова
- скаляр, який описує вертикальний або горизонтальний напрямок вектора
- еквівалентні вектори
- вектори, які мають однакову величину і однаковий напрямок
- початкова точка
- початкова точка вектора
- величина
- довжина вектора
- нормалізація
- використовуючи скалярне множення, щоб знайти одиничний вектор із заданим напрямком
- метод паралелограма
- метод знаходження суми двох векторів; розташувати вектори так, щоб вони поділяли одну і ту ж початкову точку; вектори потім утворюють дві сусідні сторони паралелограма; сума векторів - діагональ цього паралелограма
- скалярний
- дійсне число
- скалярне множення
- векторна операція, яка визначає добуток скаляра і вектора
- вектор стандартного положення
- вектор з початковою точкою\((0,0)\)
- стандартні одиничні вектори
- одиничні вектори по осях координат:\(\hat{\mathbf i}=⟨1,0⟩,\, \hat{\mathbf j}=⟨0,1⟩\)
- термінальна точка
- кінцева точка вектора
- нерівність трикутника
- довжина будь-якої сторони трикутника менше суми довжин двох інших сторін
- метод трикутника
- метод знаходження суми двох векторів; розташуйте вектори так, що кінцева точка одного вектора є початковою точкою іншого; ці вектори потім утворюють дві сторони трикутника; сума векторів - вектор, який утворює третю сторону; початкова точка суми - початкова точка першої вектор; кінцева точка суми - кінцева точка другого вектора
- одиниця вектор
- вектор з величиною\(1\)
- вектор
- математичний об'єкт, який має як величину, так і напрямок
- векторне додавання
- векторна операція, яка визначає суму двох векторів
- векторна різниця
- різниця\(\vecs{v}−\vecs{w}\) векторів визначається як\(\vecs{v}+(−\vecs{w})=\vecs{v}+(−1)\vecs{w}\)
- векторна сума
- сума двох векторів,\(\vecs{v}\) і\(\vecs{w}\), може бути побудована графічно, розмістивши початкову точку\(\vecs{w}\) в кінцевій точці\(\vecs{v}\); тоді векторна сума\(\vecs{v}+\vecs{w}\) є вектор з початковою точкою, яка збігається з початковою точкою\(\vecs{v}\), і з кінцевою точкою що збігається з кінцевою точкою\(\vecs{w}\)
- нульовий вектор
- вектор як з початковою точкою, так і кінцевою точкою\((0,0)\)