11.1: Векторно-значні функції
- Page ID
- 60685

Ми дуже добре знайомі з реальними ціннісними функціями, тобто функціями, виходом яких є дійсне число. У цьому розділі представлені векторно-значні функції - функції, виходом яких є вектор.
Визначення\(\PageIndex{1}\): Vector-Valued Functions
Векторно-значна функція - це функція виду
\[\vecs r(t) = \langle\, f(t),g(t)\,\rangle\]
або
\[\vecs r(t) = \langle \,f(t),g(t),h(t)\,\rangle,\]
де\(f\),\(g\) і\(h\) є реальними ціннісними функціями.
Домен\(\vecs r\) - це сукупність всіх значень,\(t\) для яких\(\vecs r(t)\) визначено. Діапазон\(\vecs r\) - це набір всіх можливих вихідних векторів\(\vecs r(t)\).
Оцінювання та графічне зображення векторно-значних функцій
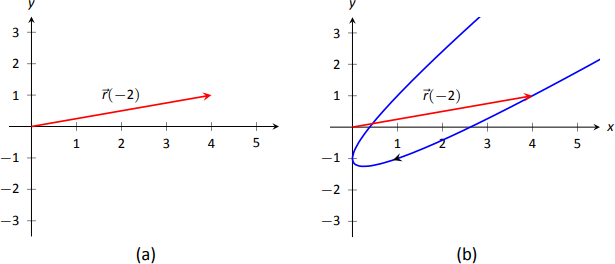
Оцінювання векторної функції за певним значенням\(t\) є простим; просто оцініть кожну компонентну функцію при цьому значенні\(t\). Наприклад, якщо\(\vecs r(t) = \langle t^2,t^2+t-1\rangle\), то\(\vecs r(-2) = \langle 4,1\rangle\). Ми можемо накидати цей вектор, як це робиться на малюнку\(\PageIndex{1a}\). Графік багато векторів є громіздким, хоча, тому, як правило, ми не ескіз весь вектор, а тільки кінцева точка. Графік векторно-значної функції - це множина всіх кінцевих точок\(\vecs r(t)\), де початкова точка кожного вектора завжди є початковою точкою. На малюнку\(\PageIndex{1b}\) ми накидаємо графік\(\vecs r\); ми можемо вказати окремі точки на графіку з їх відповідним вектором, як показано на малюнку.
Векторно-значні функції тісно пов'язані з параметричними рівняннями графів. Хоча в обох методах ми будуємо точки\(\big(x(t), y(t)\big)\) або\(\big(x(t),y(t),z(t)\big)\) створюємо графік, у контексті векторних функцій кожна така точка представляє вектор. Наслідки цього будуть більш повно реалізовані в наступному розділі, оскільки ми застосовуємо ідеї обчислення до цих функцій.
Приклад\(\PageIndex{1}\): Graphing vector-valued functions
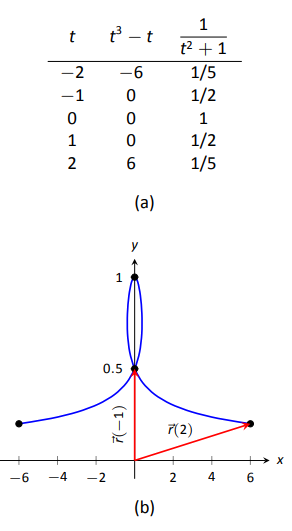
Графік\( \vecs r(t) = \langle t^3-t, \dfrac{1}{t^2+1}\rangle\), для\(-2\leq t\leq 2\). Ескіз\(\vecs r(-1)\) і\(\vecs r(2)\).
Рішення
Почнемо з складання таблиці\(x\) і\(y\) значень\(t\), як показано на малюнку\(\PageIndex{1a}\). Побудова цих точок дає вказівку на те, як виглядає графік. На\(\PageIndex{1b}\) малюнку вказуємо ці точки і накидаємо повний графік. Також виділяємо\(\vecs r(-1)\) і\(\vecs r(2)\) на графіку.
Приклад\(\PageIndex{2}\): Graphing vector-valued functions.
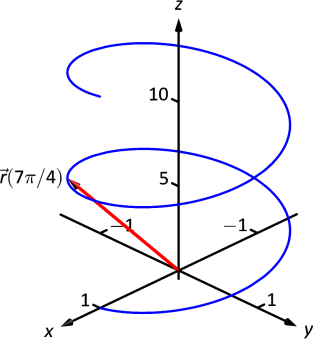
Графік\(\vecs r(t) = \langle \cos t,\sin t,t\rangle\) для\(0\leq t\leq 4\pi\).
Рішення
Ми можемо знову намітити точки, але ретельний розгляд цієї функції дуже показово. Миттєво ігноруючи третій компонент, ми бачимо, що\(x\) і\(y\) компоненти простежують коло радіуса 1 з центром у початковій точці. Помітивши, що\(z\) складова є\(t\), ми бачимо, що коли графік накручується навколо\(z\) -осі, він також збільшується з постійною швидкістю в позитивному\(z\) напрямку, утворюючи спіраль. Це зображено на малюнку\(\PageIndex{3}\). На графіку\(\vecs r(7\pi/4)\approx (0.707,-0.707,5.498) \) виділено, щоб допомогти нам зрозуміти графік.
Алгебра векторно-значних функцій
Визначення\(\PageIndex{2}\): Operations on Vector-Valued Functions
\(\vecs r_1(t)=\langle f_1(t),g_1(t)\rangle\)\(\vecs r_2(t)=\langle f_2(t),g_2(t)\rangle\)Дозволяти і бути векторні функції в\(\mathbb{R}^2\) і нехай\(c\) бути скалярним. Потім:
- \(\vecs r_1(t) \pm \vecs r_2(t) = \langle\, f_1(t)\pm f_2(t),g_1(t)\pm g_2(t)\,\rangle\).
- \(c\vecs r_1(t) = \langle\, cf_1(t),cg_1(t)\,\rangle\).
Аналогічне визначення має і векторно-значні функції в\(\mathbb{R}^3\).
Це визначення стверджує, що ми додаємо, віднімаємо та масштабуємо векторно-значні функції покомпонентно. Поєднання векторно-значних функцій таким способом може бути дуже корисним (а також створювати цікаві графіки).
Приклад\(\PageIndex{3}\): Adding and scaling vector-valued functions.
Нехай\(\vecs r_1(t) = \langle\,0.2t,0.3t\,\rangle\),\(\vecs r_2(t) = \langle\,\cos t,\sin t\,\rangle\) і\(\vecs r(t) = \vecs r_1(t)+\vecs r_2(t)\). Графік\(\vecs r_1(t)\)\(\vecs r_2(t)\),\(\vecs r(t)\) і\(5\vecs r(t)\) далі\(-10\leq t\leq10\).
Рішення
Ми можемо графувати\(\vecs r_1\) і\(\vecs r_2\) легко, будуючи точки (або просто використовуючи технологію). Давайте подумаємо над кожним на мить, щоб краще зрозуміти, як працюють векторні функції.
Ми можемо переписати\(\vecs r_1(t) = \langle\, 0.2t,0.3t\,\rangle\) як\( \vecs r_1(t) = t\langle 0.2,0.3\rangle\). Тобто функція\(\vecs r_1\) масштабує вектор\(\langle 0.2,0.3\rangle\) по\(t\). Це масштабування вектора створює лінію у напрямку\(\langle 0.2,0.3\rangle\).
Ми знайомі з\(\vecs r_2(t) = \langle\, \cos t,\sin t\,\rangle\); він простежує коло, по центру в початковій точці, радіусу 1. Малюнок\(\PageIndex{4a}\) графіків\(\vecs r_1(t)\) і\(\vecs r_2(t)\).
Додавання\(\vecs r_1(t)\) до\(\vecs r_2(t)\) виробляє\(\vecs r(t) = \langle\,\cos t + 0.2t,\sin t+0.3t\,\rangle\), графічно показано на малюнку\(\PageIndex{4b}\). Лінійний рух лінії поєднується з колом для створення петель, які рухаються в напрямку\(\langle 0.2,0.3\rangle\). (Ми закликаємо читача\(\vecs r_1(t)\) експериментувати\(\langle 2t,3t\rangle\), змінюючи на тощо, і спостерігати за ефектами на петлі.)
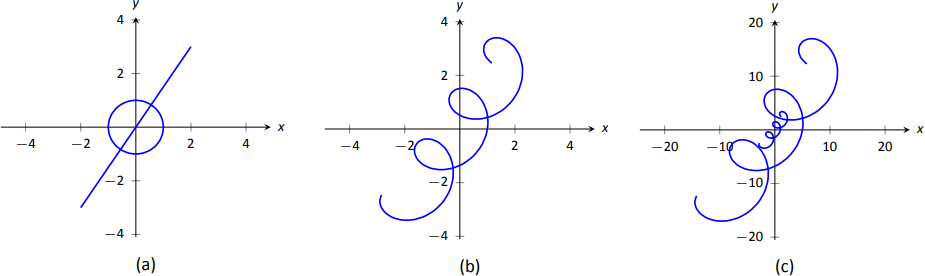
Множення\(\vecs r(t)\) на 5 масштабує функцію на 5, виробляючи\(5\vecs r(t) = \langle 5\cos t+1,5\sin t+1.5\rangle\), яка зображена на малюнку\(\PageIndex{4c}\) разом з\(\vecs r(t)\). Нова функція «в 5 разів більше», ніж\(\vecs r(t)\). Зверніть увагу, як графік\(5\vecs r(t)\) in (c) виглядає ідентичним графіку\(\vecs r(t)\) in\((b)\). Це пов'язано з тим, що\(x\) і\(y\) межі сюжету в рівно в\((c)\) 5 разів більше, ніж межі в (б).
Приклад\(\PageIndex{4}\): Adding and scaling vector-valued functions.
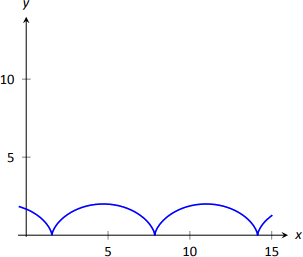
Циклоїда - це графік, промальований точкою\(p\) на коченому колі, як показано на малюнку\(\PageIndex{5}\). Знайдіть рівняння, що описує циклоїду, де коло має радіус 1.

Рішення
Ця проблема не дуже складна, якщо підійти до неї розумно. Почнемо з того, що\(\vecs p(t)\) дозволимо описати положення точки\(p\) на колі, де коло центрується біля початку і обертається тільки за годинниковою стрілкою (тобто не котиться). Це відносно просто, враховуючи наш попередній досвід роботи з параметричними рівняннями;\(\vecs p(t) = \langle \cos t, -\sin t\rangle\).
Тепер ми хочемо, щоб коло згорнувся. Ми представляємо це, дозволяючи\(\vecs c(t)\) представляти розташування центру кола. Повинно бути зрозуміло, що\(y\) складова\(\vecs c(t)\) повинна бути 1; центр кола завжди буде дорівнює 1, якщо він котиться по горизонтальній поверхні.
\(x\)Компонент\(\vecs c(t)\) є лінійною функцією\(t\):\(f(t) = mt\) для деяких скалярних\(m\). Коли\(t=0\),\(f(t) = 0\) (коло починається з центру на\(y\) -осі). Коли\(t=2\pi\), коло зробив один повний оборот, пройшовши відстань, рівну його окружності, яка теж є\(2\pi\). Це дає нам точку на нашій лінії\(f(t) = mt\), точку\((2\pi, 2\pi)\). Повинно бути зрозуміло, що\(m=1\) і\(f(t) = t\). Отже\(\vecs c(t) = \langle t, 1\rangle\).
Тепер об'єднаємо\(\vecs p\) і\(\vecs c\) разом сформуємо рівняння циклоїди:
\[\vecs r(t) = \vecs p(t) + \vecs c(t) = \langle \cos t+ t,-\sin t+1\rangle, \nonumber\]
який зображений на малюнку\(\PageIndex{6}\).
Водотоннажність
Векторно-значна функція часто\(\vecs r(t)\) використовується для опису положення рухомого об'єкта в часі\(t\). В\(t=t_0\), об'єкт знаходиться в\(\vecs r(t_0)\); в\(t=t_1\), об'єкт знаходиться в\(\vecs r(t_1)\). Знаючи локації\(\vecs r(t_0)\) і\(\vecs r(t_1)\) не вказуючи на шлях, пройдений між ними, але часто ми дбаємо лише про різницю локацій\(\vecs r(t_1)-\vecs r(t_0)\), зміщення.
Визначення\(\PageIndex{3}\): Displacement
\(\vecs r(t)\)Дозволяти бути векторної функції і нехай\(t_0<t_1\) бути значення в області. \(\vecs d\)Зсув\(\vecs r\), від\(t=t_0\) до\(t=t_1\), є\[\vecs d=\vecs r(t_1)-\vecs r(t_0).\]
Коли вектор зміщення малюється з початковою точкою в\(\vecs r(t_0)\), його кінцева точка є\(\vecs r(t_1)\). Ми думаємо про це як вектор, який вказує від початкової позиції до кінцевої позиції.
Приклад\(\PageIndex{5}\): Finding and graphing displacement vectors
Нехай\(\vecs r(t) = \langle \cos (\dfrac{\pi}{2}t),\sin (\dfrac{\pi}2 t)\rangle\). Графік\(\vecs r(t)\) далі\(-1\leq t\leq 1\), і знайдіть зсув\(\vecs r(t)\) на цьому інтервалі.
Рішення
Функція\(\vecs r(t)\) простежує одиничне коло, хоча і з іншою швидкістю, ніж «звичайна»\(\langle \cos t,\sin t\rangle\) параметризація. На\(t_0=-1\), у нас є\(\vecs r(t_0) = \langle 0,-1\rangle\); в\(t_1=1\), у нас є\(\vecs r(t_1) = \langle 0,1\rangle\). Зсув\(\vecs r(t)\) на, таким\([-1,1]\) чином,
\[\vecs d = \langle 0,1\rangle - \langle 0,-1\rangle = \langle 0,2\rangle. \nonumber\]
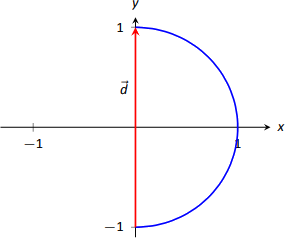
Графік включення\(\vecs r(t)\)\([-1,1]\) наведено на малюнку\(\PageIndex{7}\) разом з вектором зміщення\(\vecs d\) на цьому інтервалі.
Вимірювання переміщення змушує нас розглядати пов'язані, але дуже різні поняття. Враховуючи напівкруглий шлях, який\(\PageIndex{5}\) взяв об'єкт у прикладі, ми можемо швидко перевірити, що об'єкт закінчився на відстані 2 одиниці від свого початкового розташування. Тобто ми можемо обчислити\(\norm{d} = 2\). Однак вимірювання відстані від початкової точки відрізняється від вимірювання пройденої відстані. Будучи півколом, ми можемо виміряти пройдену цим об'єктом відстань як\(\pi\approx 3.14\) одиниці. Знання відстані від початкової точки дозволяє обчислити середню швидкість зміни.
Визначення\(\PageIndex{4}\): Average Rate of Change
\(\vecs r(t)\)Дозволяти векторно-значна функція, де кожна з її складових функцій є безперервною на своїй області, і нехай\(t_0<t_1\). Середня швидкість зміни\(\vecs r(t)\) включення\([t_0,t_1]\) становить
\[\text{average rate of change} = \dfrac{\vecs r(t_1) - \vecs r(t_0)}{t_1-t_0}.\]
Приклад\(\PageIndex{6}\): Average rate of change
Нехай\(\vecs r(t) = \langle \cos(\dfrac{\pi}2t),\sin(\dfrac{\pi}2t)\rangle\) як у прикладі 11.1.5. Знайти середню швидкість зміни\(\vecs r(t)\) включення\([-1,1]\) і включення\([-1,5]\).
Рішення
Ми обчислили в прикладі\(\PageIndex{5}\), що зміщення\(\vecs r(t)\) на\([-1,1]\) було\(\vecs d = \langle 0,2\rangle\). Таким чином, середня швидкість зміни\(\vecs r(t)\) на\([-1,1]\) становить:
\[\dfrac{\vecs r(1) -\vecs r(-1)}{1-(-1)} = \dfrac{\langle 0,2\rangle}{2} = \langle 0,1\rangle. \nonumber\]
Ми інтерпретуємо це так: об'єкт йшов напівкруглим шляхом, тобто він рухався вправо, потім перемістився назад вліво, при цьому піднімаючись повільно, потім швидко, потім знову повільно. В середньому, однак, він прогресував прямо вгору з постійною швидкістю\(\langle 0,1\rangle\) в одиницю часу.
Ми швидко бачимо, що зміщення на\([-1,5]\) таке ж, як і на\([-1,1]\), так\(\vecs d = \langle 0,2\rangle\). Середня швидкість зміни різна, хоча:
\[\dfrac{\vecs r(5)-\vecs r(-1)}{5-(-1)} = \dfrac{\langle 0,2\rangle}{6} = \langle 0,1/3\rangle. \nonumber\]
Оскільки «3 рази більше часу» знадобилося, щоб прибути в одне і те ж місце, ця середня швидкість зміни\(1/3\) на\([-1,5]\) є середньою швидкістю зміни на\([-1,1]\).
Ми розглядали середні темпи змін у розділах 1.1 та 2.1, вивчаючи межі та похідні. Те саме і тут; у наступному розділі ми застосовуємо поняття числення до векторних функцій, оскільки знаходимо межі, похідні та інтеграли. Розуміння середньої швидкості змін дасть нам розуміння похідної; переміщення дає нам одне застосування інтеграції.