10.3: Точковий продукт
- Page ID
- 60766

У попередньому розділі були представлені вектори і описано, як складати їх разом і як їх множити на скаляри. У цьому розділі наведено множення на вектори, які називаються точковим добутком.
Визначення 57 Точковий добуток
- Впускаємо\(\vec u = \langle u_1,u_2\rangle \) і\(\vec v = \langle v_1,v_2\rangle \) в\(\mathbb{R}^2\). Точковий\(\vec u\) добуток і\(\vec v\), позначається\(\vec u \cdot \vec v\), є
\[\vec u \cdot \vec v = u_1v_1+u_2v_2.\] - Впускаємо\(\vec u = \langle u_1,u_2,u_3\rangle \) і\(\vec v = \langle v_1,v_2,v_3\rangle \) в\(\mathbb{R}^3\). Точковий\(\vec u\) добуток і\(\vec v\), позначається\(\vec u \cdot \vec v\), є
\[\vec u \cdot \vec v = u_1v_1+u_2v_2+u_3v_3.\]
Зверніть увагу, як цей добуток векторів повертає скалярний, а не інший вектор. Ми практикуємо оцінку точкового добутку в наступному прикладі, потім обговоримо, чому цей продукт корисний.
Приклад\(\PageIndex{1}\): Evaluating dot products
- Нехай\(\vec u=\langle 1,2\rangle \),\(\vec v=\langle 3,-1\rangle \) в\(\mathbb{R}^2\). Знайти\(\vec u \cdot \vec v\).
- Впускаємо\(\vec x = \langle 2,-2,5\rangle \) і\(\vec y = \langle -1, 0, 3\rangle \) в\(\mathbb{R}^3\). Знайти\(\vec x \cdot \vec y\).
Рішення
- Використовуючи визначення 57, ми маємо\[\vec u \cdot \vec v = 1(3)+2(-1) = 1.\]
- Використовуючи визначення, ми маємо
\[\vec x \cdot \vec y = 2(-1) -2(0) + 5(3) = 13.\]
Точковий добуток, як показано на попередньому прикладі, дуже просто оцінити. Це лише сума продуктів. Хоча визначення не дає підказки щодо того, чому ми б дбали про цю операцію, існує дивовижний зв'язок між точковим добутком і кутами, утвореними векторами. Перш ніж констатувати цей зв'язок, наведемо теорему про деякі властивості точкового добутку.
ТЕОРЕМА 85 ВЛАСТИВОСТІ ТОЧКОВОГО ДОБУТКУ
Дозволяти\(\vec u\),\(\vec v\) і\(\vec w\) бути вектори в\(\mathbb{R}^2\) або\(\mathbb{R}^3\) і нехай\(c\) бути скалярним.
- \(\vec u \cdot \vec v = \vec v \cdot \vec u\)Комутативне майно
- \(\vec u\cdot(\vec v+\vec w) =\vec u \cdot \vec v + \vec u \cdot \vec w\)Розподільна власність
- \(c(\vec u \cdot \vec v) = (c\vec u)\cdot \vec v = \vec u \cdot (c\vec v)\)
- \(\vec 0 \cdot \vec v = 0\)
- \(\vec v \cdot \vec v= \norm{\vec v}^2 \)
Останній твердження теореми робить зручний зв'язок між величиною вектора і точковим добутком з самим собою.
Наше визначення та теорема дають властивості точкового добутку, але ми все ще, ймовірно, задаємося питанням «Що означає точковий добуток?» Корисно розуміти, що точковий добуток вектора з самим собою пов'язаний з його величиною.
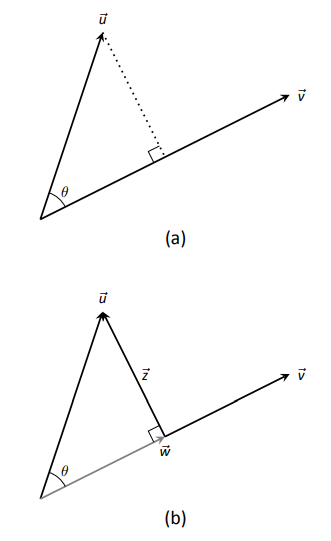
Наступна теорема розширює це розуміння, з'єднуючи точковий добуток на величини та кути. Задані вектори\(\vec u\) і\(\vec v\) в площині кут\(\theta\) чітко формується, коли\(\vec u\) і\(\vec v\) малюються з тією ж початковою точкою, як показано на малюнку 10.29 (а). (Ми завжди приймаємо,\(\theta\) щоб бути кут в\([0,\pi]\) як два кути насправді створені.)
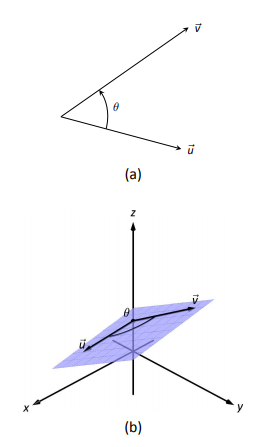
Те ж саме стосується і двох векторів у просторі: задана\(\vec u\) і\(\vec v\) в\(\mathbb{R}^3\) з однаковою початковою точкою, є площина, яка містить обидва\(\vec u\) і\(\vec v\). (Коли\(\vec u\) і\(\vec v\) є колінійними, існують нескінченні площини, які містять обидва вектори.) У цій площині ми можемо знову знайти кут\(\theta\) між ними (і знову,\(0\leq \theta\leq \pi\)). Це проілюстровано на малюнку 10.29 (b).
Наступна теорема пов'язує цей кут\(\theta\) з точковим добутком\(\vec u\) і\(\vec v\).
теорема 86 точковий добуток і кути
\(\vec v\)Дозволяти\(\vec u\) і бути вектори в\(\mathbb{R}^2\) або\(\mathbb{R}^3\). Тоді
\[\vec u \cdot \vec v = \norm{\vec u}\,\norm{\vec v} \cos\theta,\]
де\(\theta\),\(0\leq\theta\leq \pi\), - кут між\(\vec u\) і\(\vec v\).
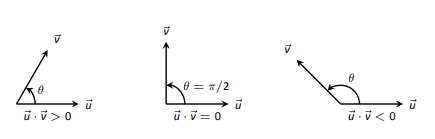
Коли\(\theta\) - гострий кут (тобто\(0\leq \theta <\pi/2\)),\(\cos \theta\) позитивний; коли\(\theta = \pi/2\),\(\cos \theta = 0\);\(\theta\) коли тупий кут (\(\pi/2<\theta \leq \pi\)),\(\cos \theta\) негативний. Таким чином знак точкового добутку дає загальне вказівку кута між векторами, проілюстроване на малюнку 10.30.
Ми можемо використовувати теорему 86 для обчислення точкового добутку, але, як правило, ця теорема використовується для пошуку кута між відомими векторами (оскільки точковий добуток, як правило, легко обчислити). З цією метою ми перепишемо рівняння теореми як
\[\cos \theta = \frac{\vec u \cdot \vec v}{\norm{\vec u}\norm{\vec v}} \quad \Leftrightarrow \quad \theta = \cos^{-1}\left(\frac{\vec u \cdot \vec v}{\norm{\vec u}\norm{\vec v}}\right).\]
Ми практикуємо використання цієї теореми в наступному прикладі.
Приклад\(\PageIndex{2}\): Using the dot product to find angles
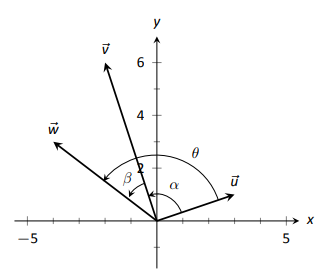
Нехай\(\vec u = \langle 3,1\rangle \),\(\vec v = \langle -2,6\rangle \) і\(\vec w = \langle -4,3\rangle \), як показано на малюнку 10.31. Знайдіть кути\(\alpha\),\(\beta\) і\(\theta\).
Рішення
Почнемо з обчислення величини кожного вектора.
\[\norm{\vec u} = \sqrt{10};\quad \norm{\vec v} = 2\sqrt{10};\quad \norm{\vec w} = 5.\]
Тепер ми застосовуємо теорему 86, щоб знайти кути.
\ [\ почати {вирівнювати*}
\ альфа &=\ cos^ {-1}\ лівий (\ frac {\ vec u\ cdot\ vec v} {(\ sqrt {10})) (2\ sqrt {10})}\ праворуч)\\
&=\ cos^ {-1} (0) =\ frac {\ pi} 2 = 90^\ circ. \\
\ бета &=\ cos^ {-1}\ лівий (\ frac {\ vec v\ cdot\ vec w} {(2\ sqrt {10}) (5)}\ праворуч)\\
&=\ cos^ {-1}\ ліворуч (\ frac {26} {10}}\ sqrt {10}}\ праворуч)\\\
\\ приблизно 0.6055\ приблизно 34.7^\ circ. \
\ тета &=\ cos^ {-1}\ лівий (\ frac {\ vec u\ cdot\ vec w} {(\ sqrt {10}) (5)}\ праворуч)\\\
=\ cos^ {-1}\ ліворуч (\ frac {-9} {5\ sqrt {10}}\ праворуч)\\\\\\ приблизно 124.7^\ circ
\ end {вирівнювати*}\]
З наших обчислень ми бачимо\(\alpha + \beta = \theta\), що, як зазначено на малюнку 10.31. Хоча ми знали, що це має бути так, приємно бачити, що ця неінтуїтивна формула дійсно повертає результати, які ми очікували.
Аналогічний приклад ми робимо далі в контексті векторів у просторі.
Приклад\(\PageIndex{3}\): Using the dot product to find angles
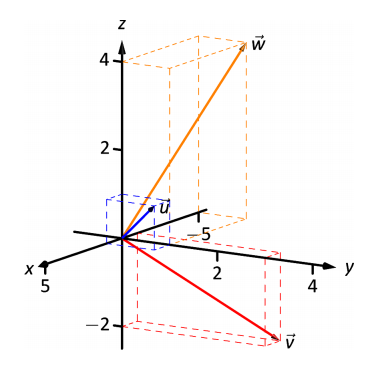
Нехай\(\vec u = \langle 1,1,1\rangle \),\(\vec v = \langle -1,3,-2\rangle \) і\(\vec w = \langle -5,1,4\rangle \), як показано на малюнку 10.32. Знайти кут між кожною парою векторів.
Рішення
- Між\(\vec u\) і\(\vec v\):
\[\begin{align*}\theta &= \cos^{-1}\left(\frac{\vec u \cdot \vec v}{\norm{\vec u}\norm{\vec v}}\right)\\&= \cos^{-1}\left(\frac{0}{\sqrt{3}\sqrt{14}}\right)\\&= \frac{\pi}2.\end{align*}\]
- Між\(\vec u\) і\(\vec w\):
\[\begin{align*}\theta &= \cos^{-1}\left(\frac{\vec u \cdot \vec w}{\norm{\vec u}\norm{\vec w}}\right)\\&= \cos^{-1}\left(\frac{0}{\sqrt{3}\sqrt{42}}\right)\\&= \frac{\pi}2.\end{align*}\] - Між\(\vec v\) і\(\vec w\):
\[\begin{align*}\theta &= \cos^{-1}\left(\frac{\vec v \cdot \vec w}{\norm{\vec v}\norm{\vec w}}\right)\\&= \cos^{-1}\left(\frac{0}{\sqrt{14}\sqrt{42}}\right)\\&= \frac{\pi}2.\end{align*}\]
Хоча наша робота показує, що кожен кут є\(\pi/2\)\(90^\circ\), тобто жоден з цих кутів не виглядає прямим кутом на малюнку 10.32. Такий випадок при малюванні тривимірних об'єктів на сторінці.
Всі три кути між цими векторами були\(\pi/2\), або\(90^\circ\). Ми знаємо з геометрії та повсякденного життя, що\(90^\circ\) кути «приємні» з різних причин, тому повинно здатися значним, що ці кути є все\(\pi/2\). Зверніть увагу на загальну ознаку кожного розрахунку (а також обчислення\(\alpha\) в прикладі 10.3.2): точкові добутки кожної пари кутів дорівнювали 0. Ми використовуємо це як основу для визначення терміна ортогональний, який по суті є синонімом перпендикуляра.
Визначення 58 ОРТОГОНАЛЬНІ
Вектори\(\vec u\) і\(\vec v\) є ортогональними, якщо їх крапковий добуток дорівнює 0.
Примітка: Термін перпендикулярний спочатку ставився до ліній. У міру прогресування математики поняття «бути під прямим кутом до» застосовувалося до інших об'єктів, таких як вектори та площини, і був введений термін ортогональний. Він особливо використовується при обговоренні об'єктів, які важко або неможливо візуалізувати: два вектори в 5-мірному просторі ортогональні, якщо їх точковий добуток дорівнює 0. Не помилково сказати, що вони перпендикулярні, але загальна умовність віддає перевагу слову ортогональний.
Приклад\(\PageIndex{4}\): Finding orthogonal vectors
Нехай\(\vec u = \langle 3,5\rangle \) і\(\vec v = \langle 1,2,3\rangle \).
- Знайти два вектори в\(\mathbb{R}^2\) ортогональних до\(\vec u\).
- Знайдіть два непаралельних вектора в\(\mathbb{R}^3\) ортогональних до\(\vec v\).
Рішення
- Нагадаємо, що лінія, перпендикулярна лінії з ухилом\(-1/m\),\(m\) має нахил, «протилежний зворотний нахил». Ми можемо думати про схил\(\vec u\) як\(5/3\), його «підйом над бігом». Вектор, ортогональний,\(\vec u\) матиме нахил\(-3/5\). Таких варіантів багато, хоча все паралельно:
\[\langle -5,3\rangle \quad \text{or} \quad\langle 5,-3\rangle \quad \text{or} \quad \langle -10,6\rangle \quad \text{or} \quad \langle 15,-9\rangle ,\text{etc.}\]
- У просторі є нескінченні напрямки, ортогональні будь-якому заданому напрямку, тому існує нескінченна кількість непаралельних векторів, ортогональних\(\vec v\). Оскільки їх так багато, у нас є велика свобода дій у пошуку деяких.
Один із способів - довільно підбирати значення для перших двох компонентів, залишивши третій невідомим. Наприклад, нехай\(\vec v_1 = \langle 2,7,z\rangle \). Якщо\(\vec v_1\) має бути ортогональним до\(\vec v\), то\(\vec v_1\cdot\vec v = 0\), так
\[2+14+3z=0 \quad \Rightarrow z = \frac{-16}{3}.\]
\(\vec v_1 = \langle 2, 7, -16/3\rangle \) так ортогонально до\(\vec v\). Ми можемо застосувати подібну техніку, залишивши перший або другий компонент невідомим.
Ще один метод знаходження вектора, ортогонального\(\vec v\) дзеркалам, що ми зробили в частині 1. Нехай\(\vec v_2 = \langle -2,1,0\rangle \). Тут ми переключили перші дві складові\(\vec v\), змінивши знак однієї з них (аналогічно «протилежному взаємному» поняттю раніше). Дозволяючи третьому компоненту дорівнювати 0 ефективно ігнорує третій компонент\(\vec v\), і легко помітити, що
\[\vec v_2\cdot\vec v = \langle -2,1,0\rangle \cdot\langle 1,2,3\rangle = 0.\]
Ясно\(\vec v_1\) і\(\vec v_2\) не паралельно.
Важлива конструкція проілюстрована на малюнку 10.33, де\(\vec v\) вектори\(\vec u\) і ескізи. У частині (а) пунктирна лінія проводиться від кінчика\(\vec u\) до лінії\(\vec v\), що містить, де пунктирна лінія ортогональна до\(\vec v\). У частині (б) пунктирна лінія замінюється вектором\(\vec z\) і\(\vec w\) формується, паралельно\(\vec v\). За схемою зрозуміло, що\(\vec u = \vec w+\vec z\). Що важливо в цій конструкції так:\(\vec u\) розкладається як сума двох векторів, один з яких паралельний\(\vec v\) і один, який перпендикулярний\(\vec v\). Важко переоцінити важливість цієї конструкції (як ми побачимо на майбутніх прикладах).
Вектори\(\vec w\),\(\vec z\) і\(\vec u\) як показано на малюнку 10.33 (б) утворюють прямокутний трикутник, де\(\vec u\) позначається кут між\(\vec v\) і\(\theta\). Ми можемо знайти\(\vec w\) в плані\(\vec v\) і\(\vec u\).
Використовуючи тригонометрію, ми можемо констатувати, що
\[\norm{\vec w} = \norm{\vec u}\cos \theta. \label{eq:proj1}\]
Ми також знаємо,\(\vec w\) що паралельно до\(\vec v\); тобто напрямок\(\vec w\) є напрямок\(\vec v\), описується одиничним вектором\(\frac{1}{\norm{\vec v}}\vec v\). Вектор\(\vec w\) - це вектор в напрямку\(\frac{1}{\norm{\vec v}}\vec v\) з величиною\(\norm{\vec u}\cos \theta\):
\ [\ почати {align*}
\ vec w &=\ Великий (\ норма {\ vec u}\ cos\ тета\ Big)\ frac {1} {\ norm {\ vec v}}\ vec v\
\ text {Замінити\(\cos\theta\) за допомогою теореми 86:} &\\
&=\ лівий (\ норма {\ vec u}\ frac {\ vec u\ cdot\ vec v} {\ norm vec u}\ норма {\ vec v}}\ право)\ frac {1} {\ norm {\ vec v}}\ vec v\\
&=\ frac {\ vec u\ cdot\ vec v} {\ norm {\ vec v} ^2}\ vec v.\
\ text {Тепер застосуйте теорему 85.} &\\
&=\ FRAC {\ vec u\ cdot\ vec v} {\ vec v\ cdot\ vec v}\ vec v.
\ end {align*}\]
Так як ця конструкція настільки важлива, їй дається особлива назва.
Визначення 59 ортогональна проекція
Нехай\(\vec u\) і\(\vec v\) буде дано. Ортогональна проекція\(\vec u\) на\(\vec v\), позначається\(\text{proj}_{\vec v}\vec u\), є
\[\text{proj}_{\vec v}\vec u = \frac{\vec u \cdot \vec v}{\vec v \cdot \vec v}\vec v.\]
Приклад\(\PageIndex{5}\): Computing the orthogonal projection
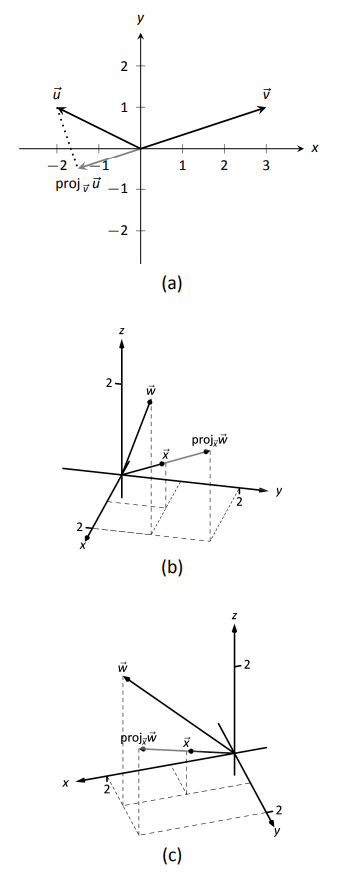
- Нехай\(\vec u= \langle -2,1\rangle \) і\(\vec v=\langle 3,1\rangle \). Знайдіть і\(\text{proj}_{\vec v}\vec u\) намалюйте всі три вектори з початковими точками в початковій точці.
- Нехай\(\vec w = \langle 2,1,3\rangle \) і\(\vec x = \langle 1,1,1\rangle \). Знайдіть і\(\text{proj}_{\vec x}\vec w\) намалюйте всі три вектори з початковими точками в початковій точці.
Рішення
- Застосовуючи Definition 59\(\vec u\), ми маємо
\[\begin{align*}\text{proj}_{\vec v}\vec u &= \frac{\vec u \cdot \vec v}{\vec v \cdot \vec v}\vec v \\&= \frac{-5}{10}\langle 3,1\rangle \\&= \langle -\frac32,-\frac12\rangle .\end{align*}\]
вектори,\(\vec v\) і\(\text{proj}_{\vec v}\vec u\) намальовані на малюнку 10.34 (a). Зверніть увагу, як проекція паралельна\(\vec v\); тобто вона лежить на тій же лінії через початок, що і\(\vec v\), хоча вона вказує у зворотному напрямку. Це тому, що кут між\(\vec u\) і\(\vec v\) тупий (тобто більше, ніж\(90^\circ\)).
- Застосувати визначення:
\[\begin{align*}\text{proj}_{\vec x}\vec w &= \frac{\vec w \cdot \vec x}{\vec x \cdot \vec x}\vec x \\&= \frac{6}{3}\langle 1,1,1\rangle \\&= \langle 2,2,2\rangle . \end{align*}\]
Ці вектори намальовані на малюнку 10.34 (b) і знову в частині (c) з іншої точки зору. Через характер графіки цих векторів ескіз у частині (b) ускладнює розпізнавання того, що намальована проекція має геометричні властивості, які вона повинна. Графік, показаний у частині (c), краще ілюструє ці властивості.
Розглянемо малюнок 10.35, де знову проілюстровано поняття ортогональної проекції. Зрозуміло, що
\ [
\ vec u =\ текст {proj} _ {\ vec v}\ vec u +\ vec z.
\ етикетка {еква:ортогпрой}\]
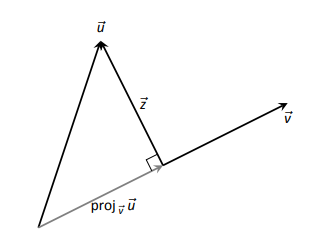
Оскільки ми знаємо, що\(\vec u\) і\(\text{proj}_{\vec v}\vec u\) є, ми можемо вирішити\(\vec z\) і стверджувати, що
\[\vec z = \vec u - \text{proj}_{\vec v}\vec u.\]
Це змушує нас переписати Equation\ ref {eq:orthogproj}, здавалося б, дурним способом:\[\vec u = \text{proj}_{\vec v}\vec u + (\vec u - \text{proj}_{\vec v}\vec u).\]
Це не дурниця, як зазначено в наступній ключовій ідеї. (Примітка до позначення: вираз\(\parallel \vec y\) "" означає «паралельно\(\vec y\).» Ми можемо використовувати це позначення для стану "\(\vec x\parallel\vec y\)", що означає «\(\vec x\)паралельно»\(\vec y\). Вираз\(\perp \vec y\) "означає «ортогонально до\(\vec y\)» і вживається аналогічно.)
ключова ідея 49 ортогональне розкладання векторів
Нехай\(\vec u\) і\(\vec v\) буде дано. Потім\(\vec u\) може бути записана як сума двох векторів, один з яких паралельний\(\vec v\), а один з яких ортогональний\(\vec v\):
\[\vec u = \underbrace{\text{proj}_{\vec v}\vec u}_{\parallel\ \vec v}\ +\ (\underbrace{\vec u-\text{proj}_{\vec v}\vec u}_{\perp\ \vec v}).\]
Ми ілюструємо використання цієї рівності в наступному прикладі.
Приклад\(\PageIndex{6}\): Orthogonal decomposition of vectors
- Нехай\(\vec u = \langle -2,1\rangle \) і\(\vec v = \langle 3,1\rangle \) як у прикладі 10.3.5. Розкласти\(\vec u\) як суму вектора паралельно\(\vec v\) і вектора, ортогонального до\(\vec v\).
- Нехай\(\vec w =\langle 2,1,3\rangle \) і\(\vec x =\langle 1,1,1\rangle \) як у прикладі 10.3.5. Розкласти\(\vec w\) як суму вектора паралельно\(\vec x\) і вектора, ортогонального до\(\vec x\).
Рішення
- У прикладі 10.3.5 ми виявили, що\(\text{proj}_{\vec v}\vec u = \langle -1.5,-0.5\rangle \). Нехай\[\vec z = \vec u - \text{proj}_{\vec v}\vec u = \langle -2,1\rangle - \langle -1.5,-0.5\rangle = \langle -0.5, 1.5\rangle .\]
є\(\vec z\) ортогональним до\(\vec v\)? (Тобто, є\(\vec z \perp\vec v\)?) Ми перевіряємо ортогональність за допомогою крапкового добутку:
\[\vec z \cdot \vec v = \langle -0.5,1.5\rangle \cdot \langle 3,1\rangle =0.\]
Оскільки крапковий добуток дорівнює 0, ми знаємо\(\vec z \perp \vec v\). Таким чином:
\[\begin{align*}\vec u &= \text{proj}_{\vec v}\vec u\ +\ (\vec u - \text{proj}_{\vec v}\vec u) \\\langle -2,1\rangle &= \underbrace{\langle -1.5,-0.5\rangle }_{\parallel\ \vec v}\ +\ \underbrace{\langle -0.5,1.5\rangle }_{\perp \ \vec v}.\end{align*}\] - Ми знайшли в прикладі 10.3.5, що\(\text{proj}_{\vec x}\vec w = \langle 2,2,2\rangle \). Застосовуючи Key Idea, ми маємо:
\[\vec z = \vec w - \text{proj}_{\vec x}\vec w = \langle 2,1,3\rangle - \langle 2,2,2\rangle = \langle 0,-1,1\rangle .\]
Ми перевіряємо, чи\(\vec z \perp \vec x\):
\[\vec z \cdot \vec x = \langle 0,-1,1\rangle \cdot \langle 1,1,1\rangle = 0.\]
Оскільки крапковий добуток дорівнює 0, ми знаємо, що два вектори ортогональні.
Тепер ми пишемо\(\vec w\) як суму двох векторів, один паралельний і один ортогональний до\(\vec x\):
\[\begin{align*}\vec w &= \text{proj}_{\vec x}\vec w\ +\ (\vec w - \text{proj}_{\vec x}\vec w) \\\langle 2,1,3\rangle &= \underbrace{\langle 2,2,2\rangle }_{\parallel\ \vec x}\ +\ \underbrace{\langle 0,-1,1\rangle }_{\perp \ \vec x} \end{align*}\]
Наведемо приклад того, де корисна ця декомпозиція.
Приклад\(\PageIndex{7}\): Orthogonally decomposing a force vector
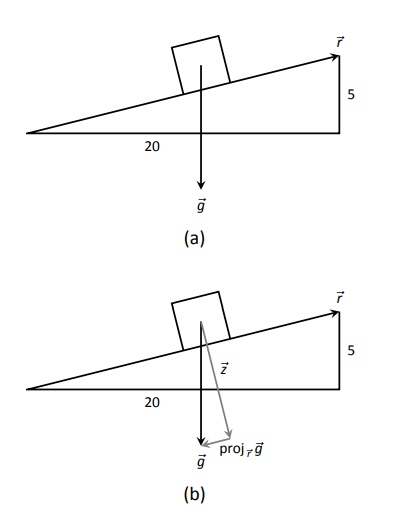
Розглянемо малюнок 10.36 (а), на якому показано коробку вагою 50 фунтів на рампі, яка піднімається на 5 футів над прольотом 20 футів. Знайдіть складові сили, і їх величини, що діють на коробку (як намальовано в частині (б) малюнка):
- в напрямку пандуса, і
- ортогональні до пандуса.
Рішення
Оскільки пандус піднімається на 5 футів на горизонтальній відстані 20 футів, ми можемо представляти напрямок пандуса з вектором\(\vec r= \langle 20,5\rangle \). Гравітація тягне вниз з силою 50lb, яку ми представляємо з\(\vec g = \langle 0,-50\rangle \).
- Щоб знайти силу тяжіння в напрямку пандуса, обчислюємо\(\text{proj}_{\vec r}\vec g\):
\[\begin{align*}\text{proj}_{\vec r}\vec g &= \frac{\vec g \cdot \vec r}{\vec r \cdot \vec r}\vec r\\&= \frac{-250}{425}\langle 20,5\rangle \\&= \langle -\frac{200}{17},-\frac{50}{17}\rangle \approx \langle -11.76,-2.94\rangle .\end{align*}\]
Величина\(\text{proj}_{\vec r}\vec g\) є\(\norm{\text{proj}_{\vec r}\vec g} = 50/\sqrt{17} \approx 12.13\text{lb}\). Хоча коробка важить 50 фунтів, сили близько 12 фунтів достатньо, щоб утримати коробку від ковзання вниз по рампі.
- Щоб знайти складову\(\vec z\) гравітації, ортогональну пандусу, ми використовуємо Key Idea 49.
\[\begin{align*}\vec z &= \vec g - \text{proj}_{\vec r}\vec g \\&= \langle \frac{200}{17},-\frac{800}{17}\rangle \approx \langle 11.76,-47.06\rangle .\end{align*}\]
Величина цієї сили\(\norm{\vec z} \approx 48.51\) фунт. у фізиці та техніці знання цієї сили важливо при обчисленні таких речей, як статична сила тертя. (Наприклад, ми могли б легко обчислити, якщо статичної сили тертя було достатньо, щоб утримати коробку від ковзання вниз по рампі.)
Заявка на роботу
У фізиці застосування сили\(F\) для переміщення об'єкта по прямій відстані\(d\) виробляє роботу; обсяг роботи\(W\) дорівнює\(W=Fd\), (де\(F\) знаходиться в напрямку руху). Ортогональна проекція дозволяє обчислити роботу, коли сила не в напрямку руху.
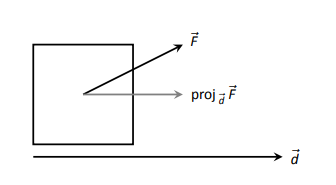
Розглянемо рис. 10.37, де до об'єкта, що рухається в напрямку\(\vec d\).\(\vec F\) (Відстань, на яку проходить об'єкт, - це величина\(\vec d\).) Виконана робота - величина сили в напрямку\(\vec d\),\(\norm{\text{proj}_{\vec d}\vec F}\), раз\(\norm d\):
\ [\ begin {вирівнювати*}
\ норма {\ текст {proj} _ {\ vec d}\ vec F}\ cdot\ norm d\ =\ Big\ |\ frac {\ vec F\ cdot\ vec d}\ vec d\ Big\\ cdot\ norm d\\
& ампер; =\ ліворуч |\ frac {\ vec F\ cdot\ vec d} {\ норма d^2}\ праворуч |\ cdot\ норма d\ cdot\ норма d\\
&=\ frac {\ ліворуч |\ vec F\ cdot\} {\ норма d^2}\ норма d^2\
&=\ ліворуч |\ vec F\ cdot\ vec d\ праворуч |.
\ end {вирівнювати*}\]
Вираз\(\vec F \cdot \vec d\) буде позитивним, якщо кут між\(\vec F\) і\(\vec d\) є гострим; коли кут тупий (отже,\(\vec F \cdot \vec d\) негативний), сила викликає рух у зворотному напрямку\(\vec d\), що призводить до «негативної роботи». Ми хочемо, щоб захопити цей знак, тому ми скидаємо абсолютне значення і знаходимо, що\(W = \vec F \cdot \vec d\).
Визначення 60 РОБОТА
\(\vec F\)Дозволяти бути постійною силою, яка переміщує об'єкт по прямій лінії від точки\(P\) до точки\(Q\). Нехай\(\vec d = \vec{PQ}\). Робота,\(W\) виконана\(\vec F\) разом\(\vec d\), є\(W = \vec F \cdot \vec d\).
Приклад\(\PageIndex{8}\): Computing work
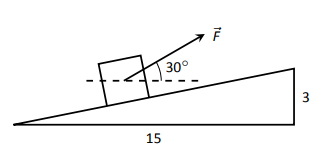
Людина ковзає коробку вздовж рампи, яка піднімається 3 фути на відстань 15 футів, застосовуючи 50 фунтів сили, як показано на малюнку 10.38. Обчислити виконану роботу.
Рішення. На малюнку вказується, що прикладена сила робить\(30^\circ\) кут з горизонталлю, тому\(\vec F = 50\langle \cos 30^\circ,\sin 30^\circ\rangle \approx \langle 43.3,25\rangle .\) пандус представлений\(\vec d = \langle 15,3\rangle \). Виконана робота виконується просто
\[\vec F \cdot \vec d = 50\langle \cos 30^\circ,\sin 30^\circ\rangle \cdot \langle 15,3\rangle \approx 724.5 \text{ft--lb}.\]
Зверніть увагу, як ми насправді не обчислили відстань, яку пройшов об'єкт, ні величину сили у напрямку руху; це все за своєю суттю обчислюється точковим добутком!
Точковий добуток є потужним способом оцінки обчислень, які залежать від кутів без фактичного використання кутів. Наступний розділ досліджує інший «добуток» на вектори, перехресний добуток. Знову ж таки, кути відіграють важливу роль, хоча і зовсім по-іншому.