10.2: Вступ до векторів
- Page ID
- 60746

Багато величин, про які ми думаємо щодня, можна описати єдиним числом: температура, швидкість, вартість, вага і зріст. Є також багато інших понять, з якими ми стикаємося щодня, які не можна описати лише одним числом. Наприклад, прогнозатор погоди часто описує вітер з його швидкістю та напрямком («\(\ldots\)з вітрами з південного сходу поривом до 30 миль/год\(\ldots\)»). Застосовуючи силу, ми стурбовані як величиною, так і напрямком цієї сили. В обох цих прикладах важливе значення має напрямок. Через це ми вивчаємо вектори, математичні об'єкти, які передають як величину, так і інформацію про напрямок.
Одне визначення вектора «голі кістки» базується на тому, що ми писали вище: «вектор - це математичний об'єкт з параметрами величини та напрямку». Це визначення залишає бажати кращого, оскільки воно не дає жодних вказівок щодо того, як слід використовувати такий об'єкт. Існує кілька інших визначень; тут ми вибираємо визначення, яке корениться в геометричній візуалізації векторів. Це дуже спрощено, але з готовністю дозволяє подальше розслідування.
Визначення 51 Вектор
Вектор - це спрямований відрізок лінії.
Задані точки\(P\) і\(Q\) (або в площині, або в просторі) позначаємо вектором від\(P\) до\(Q\).\(\vec{PQ}\) Точка\(P\), як кажуть, є початковою точкою вектора, а точка\(Q\) - кінцевою точкою.
Величина, довжина або \(\vec{PQ}\)норма - довжина відрізка лінії\(\overline{PQ}\):
\[\norm{\vec{PQ}} = \norm{\overline{PQ}}.\]
Два вектора рівні, якщо вони мають однакову величину і напрямок.
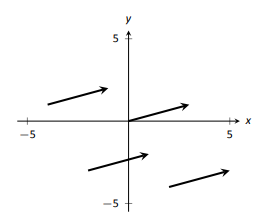
На малюнку 10.18 показано кілька екземплярів одного вектора. Кожен спрямований відрізок лінії має однаковий напрямок і довжину (величину), отже, кожен є одним і тим же вектором.
Ми використовуємо\(\mathbb{R}^2\) (вимовляється «r two») для представлення всіх векторів на площині, і використовуємо\(\mathbb{R}^3\) (вимовляється «r три») для представлення всіх векторів у просторі.
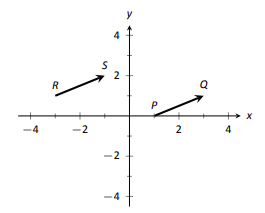
Розглянемо вектори\(\vec{PQ}\) і\(\vec{RS}\) як показано на малюнку 10.19. Вектори виглядають рівними; тобто вони, здається, мають однакову довжину і напрямок. Дійсно, вони є. Обидва вектори рухаються на 2 одиниці вправо і на 1 одиницю вгору від початкової точки, щоб досягти кінцевої точки. Можна проаналізувати цей рух, щоб виміряти величину вектора, а сам рух дає інформацію про напрямок (можна також виміряти нахил лінії, що проходить через\(P\)\(Q\) і/або\(R\) і\(S\)). Оскільки вони мають однакову довжину і напрямок, ці два вектори рівні.
Це демонструє, що за своєю суттю все, про що ми дбаємо, - це зміщення; тобто, наскільки далеко в\(x\),\(y\) і, можливо,\(z\) напрямках кінцева точка знаходиться від початкової точки. Обидва вектори\(\vec{PQ}\) і\(\vec{RS}\) на малюнку 10.19 мають\(x\) -зсув 2 і a\(y\) -зміщення 1. Це говорить про стандартний спосіб опису векторів в площині. Вектор,\(x\) -зміщення якого є\(a\) і чиє\(y\) -зміщення\(b\) буде мати кінцеву точку,\((a,b)\) коли початковою точкою є початок,\((0,0)\). Це призводить нас до визначення стандартного і стислого способу звернення до векторів.
Визначення 52 Компонентна форма вектора
- Компонентна форма вектора\(\vec{v}\) в\(\mathbb{R}^2\), кінцева точка якого,\((a,\,b)\) коли його початкова точка\((0,\,0)\), є\(\langle a,b\rangle.\)
- Компонентна форма вектора\(\vec{v}\) в\(\mathbb{R}^3\), кінцева точка якого,\((a,\,b,\,c)\) коли його початкова точка\((0,\,0,\,0)\), є\(\langle a,b,c\rangle.\)
Цифри\(a\),\(b\) (і\(c\), відповідно) є складовими\(\vec v\).
З визначення випливає, що складова форма вектора\(\vec{PQ}\), де\(P=(x_1,y_1)\) і\(Q=(x_2,y_2)\) є
\[\vec{PQ} = \langle x_2-x_1, y_2-y_1\rangle;\]
в просторі, де\(P=(x_1,y_1,z_1)\) і\(Q=(x_2,y_2,z_2)\), складовою формою\(\vec{PQ}\) є
\[\vec{PQ} = \langle x_2-x_1, y_2-y_1,z_2-z_1\rangle.\]
Ми практикуємо використання цього позначення в наступному прикладі.
Приклад\(\PageIndex{1}\): Using component form notation for vectors
- Намалюйте вектор,\(\vec v=\langle 2,-1\rangle\) починаючи з\(P=(3,2)\) і знайдіть його величину.
- Знайдіть складову форму\(\vec w\) вектора, початковою точкою якого є\(R=(-3,-2)\) і кінцева точка якого\(S=(-1,2)\).
- Намалюйте вектор,\(\vec u = \langle 2,-1,3\rangle\) починаючи з точки,\(Q = (1,1,1)\) і знайдіть його величину.
Рішення
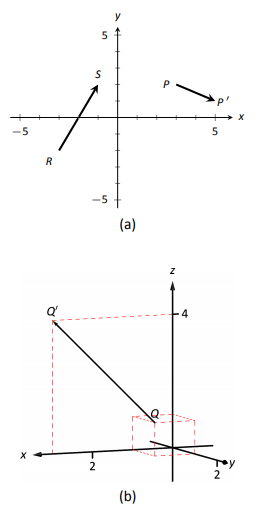
- Використовуючи\(P\) як початкову точку, ми рухаємо 2 одиниці в\(x\) позитивному напрямку та\(-1\) одиниці в\(y\) позитивному напрямку, щоб прийти до кінцевої точки\(P\,'=(5,1)\), як показано на малюнку 10.20 (a).
Величина\(\vec v\) визначається безпосередньо з складової форми:
\[\norm{\vec v} =\sqrt{2^2+(-1)^2} = \sqrt{5}. \]
- Використовуючи примітку після визначення 52, ми
\[\vec{RS} = \langle -1-(-3), 2-(-2)\rangle = \langle 2,4\rangle.\]
можемо легко побачити з малюнка 10.20 (а), що\(x\) - і\(y\) -зміщення\(\vec{RS}\) є 2 і 4 відповідно, як випливає з форми компонента.
- Використовуючи\(Q\) як початкову точку, ми рухаємо 2 одиниці в позитивному\(x\) напрямку,\(-1\) одиницю в позитивному\(y\) -напрямку та 3 одиниці в позитивному\(z\) напрямку, щоб прийти до кінцевої точки\(Q' = (3,0,4)\), проілюстровано на малюнку 10.20 (b).
Величина\(\vec u\) дорівнює:\[\norm{\vec u} = \sqrt{2^2+(-1)^2+3^2} = \sqrt{14}.\]
Тепер, коли ми визначили вектори і створили приємні позначення, за допомогою яких можна їх описати, ми починаємо розглядати, як вектори взаємодіють один з одним. Тобто ми визначаємо алгебру на векторах.
Визначення 53 ВЕКТОРНА АЛГЕБРА
- \(\vec u = \langle u_1,u_2\rangle\)\(\vec v = \langle v_1,v_2\rangle\)Дозволяти і бути вектори в\(\mathbb{R}^2\), і нехай\(c\) бути скалярним.
(а) Додавання або сума векторів\(\vec u\) і\(\vec v\) є вектором\[\vec u+\vec v = \langle u_1+v_1, u_2+v_2\rangle.\]
(b) Скалярний добуток\(c\) і\(\vec v\) є вектором\[c\vec v = c\langle v_1,v_2\rangle = \langle cv_1,cv_2\rangle.\]
- \(\vec u = \langle u_1,u_2,u_3\rangle\)\(\vec v = \langle v_1,v_2,v_3\rangle\)Дозволяти і бути вектори в\(\mathbb{R}^3\), і нехай\(c\) бути скалярним.
(а) Додавання або сума векторів\(\vec u\) і\(\vec v\) є вектором\[\vec u+\vec v = \langle u_1+v_1, u_2+v_2, u_3+v_3\rangle.\]
(b) Скалярний добуток\(c\) і\(\vec v\) є вектором\[c\vec v = c\langle v_1,v_2,v_3\rangle = \langle cv_1,cv_2,cv_3\rangle.\]
Коротше кажучи, ми говоримо, що додавання та скалярне множення обчислюються «компонентно-мудрим».
Приклад\(\PageIndex{2}\): Adding vectors
Намалюйте вектори\(\vec u = \langle1,3\rangle\),\(\vec v = \langle 2,1\rangle\) і\(\vec u+\vec v\) все з початковою точкою в початковій точці.
Рішення
Спочатку обчислюємо\(\vec u +\vec v\).
\ [\ begin {align*}
\ vec u+\ vec v &=\ лангове 1,3\ діапазон +\ ланголь 2,1\ діапазон\\
&=\ лангель 3,4\ діапазон.
\ end {align*}\] Всі
вони намальовані на малюнку 10.21.
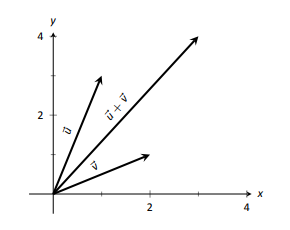
Оскільки вектори передають інформацію про величину та напрямок, сума векторів також передають інформацію про довжину та величину. Додавання\(\vec u+\vec v\) передбачає наступну ідею:
\[\text{"Starting at an initial point, go out \(\vec u\), then go out \(\vec v\)."}\]
Ця ідея намальована на малюнку 10.22, де початковою точкою\(\vec v\) є кінцева точка\(\vec u\). Це відоме як «Правило від голови до хвоста» додавання векторів. Векторне додавання дуже важливо. Наприклад, якщо вектори\(\vec u\) і\(\vec v\) представляють сили, що діють на тіло, сума\(\vec u+\vec v\) дає отриману силу. Через різних фізичних застосувань векторного додавання суму часто\(\vec u+\vec v\) називають результуючим вектором, або просто «результуючим».
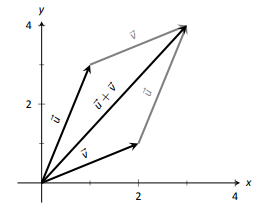
Аналітично це легко помітити\(\vec u+\vec v = \vec v+\vec u\). Малюнок 10.22 також дає графічне представлення цього, використовуючи сірі вектори. Зверніть увагу\(\vec v\), що вектори\(\vec u\) і при розташуванні, як на малюнку, утворюють паралелограм. Через це правило «Голова до хвоста» також відоме як Закон паралелограма: вектор\(\vec u+\vec v\) визначається формуванням паралелограма, визначеного векторами,\(\vec u\) і\(\vec v\); початкова точка\(\vec u+\vec v\) - загальна початкова точка паралелограма, а кінцевою точкою суми є загальна кінцева точка паралелограма.
Хоча це не ілюстровано тут, правило «Голова до хвоста» та закон паралелограма тримають\(\mathbb{R}^3\) також вектори.
З властивостей дійсних чисел і визначення 53 випливає, що\[\vec u-\vec v = \vec u + (-1)\vec v.\]
Закон паралелограма дає нам хороший спосіб візуалізувати це віднімання. Ми демонструємо це в наступному прикладі.
Приклад\(\PageIndex{3}\): Vector Subtraction
Нехай\(\vec u = \langle 3,1\rangle\) і\(\vec v=\langle 1,2\rangle.\) обчислюйте і ескіз\(\vec u-\vec v\).
Рішення
Обчислення\(\vec u-\vec v\) є простим, і ми показуємо всі кроки нижче. Зазвичай формальний крок множення на\((-1)\) опущений, і ми «просто віднімаємо».
\ [\ begin {align*}
\ vec u-\ vec v &=\ vec u + (-1)\ vec v\\
&=\ лангове 3,1\ діапазон +\ кут -1, -2\ діапазон\\
&=\ лангл 2, -1\ діапазон.
\ end {вирівнювати*}\]
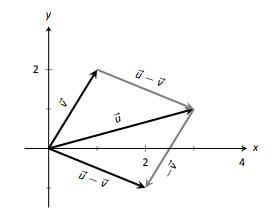
Малюнок 10.23 ілюструє, використовуючи правило від голови до хвоста, як віднімання можна розглядати як суму\(\vec u + (-\vec v)\). На малюнку також показано, як\(\vec u-\vec v\) можна отримати, дивлячись лише на кінцеві точки\(\vec u\) і\(\vec v\) (коли їх початкові точки однакові).
Приклад\(\PageIndex{4}\): Scaling vectors
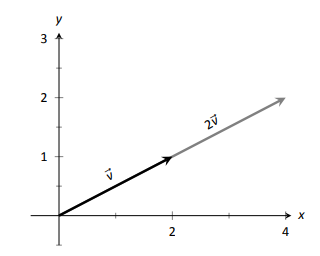
- Намалюйте вектори\(\vec v = \langle 2,1\rangle\) і\(2\vec v\) з початковою точкою в початковій точці.
- Обчислити величини\(\vec v\) і\(2\vec v\).
Рішення
- Ми обчислюємо\(2\vec v\):
\[\begin{align*}2\vec v &= 2\langle 2,1\rangle\\&= \langle 4,2\rangle.\end{align*}\]
Обидва\(\vec v\) і\(2\vec v\) намальовані на рис. 10.24. Зверніть увагу, що починається\(2\vec v\) не в кінцевій точці\(\vec v\); скоріше, його початкова точка також є початком. - Цифра говорить про\(2\vec v\) те, що в два рази довше\(\vec v\). Ми обчислюємо їх величини, щоб підтвердити це.
\[\begin{align*}\norm{\vec v} &= \sqrt{2^2+1^2}\\&= \sqrt{5}.\\\norm{2\vec v}&=\sqrt{4^2+2^2} \\&= \sqrt{20}\\&= \sqrt{4\cdot 5} = 2\sqrt{5}.\end{align*}\]
Як ми підозрювали\(2\vec v\), в два рази довше\(\vec v\).
Нульовий вектор - це вектор, початкова точка якого також є його кінцевою точкою. Позначається вона за допомогою\(\vec 0\). Його складова форма, в\(\mathbb{R}^2\), є\(\langle 0,0\rangle\); в\(\mathbb{R}^3\), це\(\langle 0,0,0\rangle\). Зазвичай контекст дає зрозуміти, чи\(\vec 0\) має на увазі вектор в площині або в просторі.
Наші приклади проілюстрували ключові принципи векторної алгебри: як додавати та віднімати вектори та як множити вектори на скаляр. Наступна теорема формально викладає властивості цих операцій.
ТЕОРЕМА 84 ВЛАСТИВОСТІ ВЕКТОРНИХ ОПЕРАЦІЙ
Нижче вірно для всіх скалярів\(c\) і\(d\), і для всіх векторів\(\vec u\)\(\vec w\),\(\vec v\) і\(\vec u\), де,\(\vec v\) і\(\vec w\) всі в\(\mathbb{R}^2\) або де\(\vec u\),\(\vec v\) і\(\vec w\) всі в\(\mathbb{R}^3\):
- \(\underbrace{\vec u+\vec v = \vec v+\vec u}_{Commutative Property}\)
- \(\underbrace{\vec u+\vec v)+\vec w = \vec u+(\vec v+\vec w)}_{Associative Property}\)
- \(\underbrace{\vec v+\vec 0 = \vec v}_{Additive Identity}\)
- \((cd)\vec v= c(d\vec v)\)
- \(\underbrace{c(\vec u+\vec v) = c\vec u+c\vec v}_{Distributive Property}\)
- \(\underbrace{(c+d)\vec v = c\vec v+d\vec v}_{Distributive Property}\)
- \(0\vec v = \vec 0\)
- \(\norm{c\vec v} = |c|\cdot\norm{\vec v}\)
- \(\norm u = 0\)якщо, і тільки якщо,\(\vec u = \vec 0\).
Як зазначено раніше, кожен вектор\(\vec v\) передає інформацію про величину і напрямок. У нас є метод вилучення величини, який ми записуємо як\(\norm{\vec v}\). Одиничні вектори - це спосіб вилучення інформації про напрямок з вектора.
Визначення 54 одиниці вектора
Одиничний вектор - це вектор\(\vec v\) з величиною 1; тобто
\[\norm{\vec v}=1.\]
Розглянемо такий сценарій: вам дано вектор\(\vec v\) і вам кажуть створити вектор довжиною 10 в напрямку\(\vec v\). Як це зробити? Якби ми\(\vec u\) знали, що це вектор одиниці в напрямку\(\vec v\), відповідь була б простою:\(10\vec u\). Отже, як ми знаходимо\(\vec u\)?
Властивість 8 теореми 84 тримає ключ. Якщо розділити\(\vec v\) на його величину, він стає вектором довжини 1. Розглянемо:
\ [\ begin {align*}
\ Big\ |\ frac {1} {\ norm {\ vec v}}\ vec v\ Big\ | &=\ frac {1} {\ norm {\ vec v}}\ norm {\ vec v} &\ text {(ми можемо витягнути\( \frac{1}{\norm{\vec v}}\) як скаляр)}\\
&= 1.
\ end {вирівнювати*}\]
Так вектор довжини 10 в напрямку\(\vec v\) є\( 10\frac{1}{\norm{\vec v}}\vec v.\) Приклад зробить це більш зрозумілим.
Приклад\(\PageIndex{5}\): Using Unit Vectors
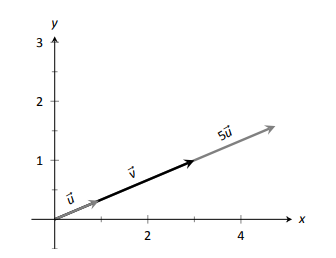
Нехай\(\vec v= \langle 3,1\rangle\) і нехай\(\vec w = \langle 1,2,2\rangle\).
- Знайти вектор одиниці виміру в напрямку\(\vec v\).
- Знайти вектор одиниці виміру в напрямку\(\vec w\).
- Знайти вектор в напрямку\(\vec v\) з величиною 5.
Рішення
- Знаходимо\(\norm{\vec v} = \sqrt{10}\). Таким чином, вектор одиниці\(\vec u\) в напрямку\(\vec v\) є\[\vec u = \frac{1}{\sqrt{10}}\vec v = \langle \frac{3}{\sqrt{10}},\frac{1}{\sqrt{10}}\rangle.\]
- Знаходимо\(\norm{\vec w} = 3\), тому\(\vec z\) одиничний вектор в напрямку\(\vec w\) є
\[\vec u = \frac13\vec w = \langle \frac13,\frac23,\frac23\rangle.\] - Для створення вектора з величиною 5 в напрямку множимо одиничний вектор\(\vec u\) на 5.\(\vec v\) Таким\(5\vec u = \langle 15/\sqrt{10},5/\sqrt{10}\rangle\) є вектор, який ми шукаємо. Це намальовано на малюнку 10.25.
Основне формування одиничного вектора\(\vec u\) в напрямку вектора\(\vec v\) призводить до цікавого рівняння. Це:
\[\vec v = \norm{\vec v}\frac{1}{\norm{\vec v}}\vec v.\]
Ми перепишемо рівняння з дужками, щоб зробити крапку:
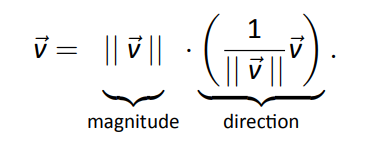
Це рівняння ілюструє той факт, що вектор має як величину, так і напрямок, де ми розглядаємо одиничний вектор як подає лише інформацію про напрямок. Ідентифікація одиничних векторів з напрямком дозволяє визначити паралельні вектори.
Визначення 55 Паралельні вектори
- Одиниці векторів\(\vec u_1\) і\(\vec u_2\) паралельні, якщо\(\vec u_1 = \pm \vec u_2\).
- Ненульові вектори\(\vec v_1\) і\(\vec v_2\) паралельні, якщо їх відповідні одиничні вектори паралельні.
Це еквівалентно сказати, що вектори\(\vec v_1\) і\(\vec v_2\) паралельні, якщо є скаляр\(c\neq 0\) такий, що\(\vec v_1 = c\vec v_2\) (див. граничну примітку).
Примітка:\(\vec 0\) є безнаправленим; тому що\(\norm{0}=0\), немає одиничного вектора в «напрямку»\(\vec 0\).
Деякі тексти визначають два вектори як паралельні, якщо один скалярний кратний іншому. За цим визначенням,\(\vec 0\) паралельно всім векторам як\(\vec 0 = 0\vec v\) для всіх\(\vec v\).
Ми віддаємо перевагу даному визначенню паралелі, оскільки воно ґрунтується на тому, що одиничні вектори надають інформацію про напрямок. Можна прийняти конвенцію, яка\(\vec 0\) паралельна всім векторам, якщо вони бажають.
Якщо графувати всі одиничні вектори\(\mathbb{R}^2\) з початковою точкою в початковій точці, то кінцеві точки будуть лежати на одиничному колі. Виходячи з того, що ми знаємо з тригонометрії, ми можемо потім сказати, що складова форма всіх одиничних векторів в\(\mathbb{R}^2\) є\(\langle \cos\theta,\sin\theta\rangle\) для деякого кута\(\theta\).
Подібна конструкція в\(\mathbb{R}^3\) показує, що кінцеві точки все лежать на одиничній сфері. Ці вектори також мають певну складову форму, але його виведення не настільки просте, як для одиничних векторів в\(\mathbb{R}^2\). Важливі поняття про одиничні вектори наведені в наступній Key Idea.
КЛЮЧОВІ ІДЕЯ 48 БЛОК ВЕКТОРІВ
- Вектор одиниці в напрямку\(\vec v\) є\[ \vec u = \frac1{\norm{\vec v}} \vec v.\]
- Вектор\(\vec u\) in\(\mathbb{R}^2\) є одиничним вектором, якщо і тільки якщо, його складова форма\(\langle \cos\theta,\sin\theta\rangle\) для деякого кута\(\theta\).
- Вектор\(\vec u\) in\(\mathbb{R}^3\) - це одиничний вектор, якщо, і тільки якщо, його складова форма\(\langle \sin\theta\cos\varphi,\sin\theta\sin\varphi,\cos\theta\rangle\) для деяких кутів\(\theta\) і\(\varphi\).
Ці формули можуть стати в нагоді в самих різних ситуаціях, особливо формула для одиничних векторів в площині.
Приклад\(\PageIndex{6}\): Finding Component Forces
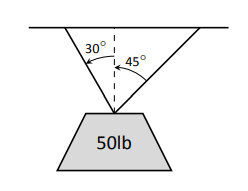
Розглянемо вагу 50 фунтів, що висить з двох ланцюгів, як показано на малюнку 10.26. Один ланцюг робить кут\(30^\circ\) з вертикаллю, а інший кут\(45^\circ\). Знайдіть зусилля, прикладене до кожного ланцюга.
Рішення
Знаючи, що гравітація тягне вагу 50 фунтів прямо вниз, ми можемо створити вектор\(\vec F\) для представлення цієї сили.
\[\vec F = 50\langle 0,-1\rangle = \langle 0,-50\rangle.\]
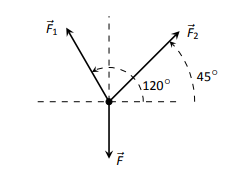
Ми можемо розглядати кожен ланцюг як «тягне» вагу вгору, запобігаючи його падінню. Ми можемо зобразити силу від кожного ланцюга вектором. \(\vec F_1\)Дозволяти представляють силу від ланцюга, що робить кут\(30^\circ\) з вертикаллю, і нехай\(\vec F_2\) представляють силу утворюють інший ланцюг. Перетворіть всі кути, які потрібно виміряти, від горизонталі (як показано на малюнку 10.27), і застосуйте Key Idea 48. Оскільки ми ще не знаємо величини цих векторів (це проблема під рукою), ми використовуємо\(m_1\) та\(m_2\) представляємо їх.
\[\vec F_1 = m_1\langle \cos 120^\circ,\sin120^\circ\rangle\]
\[\vec F_2 = m_2\langle \cos 45^\circ,\sin45^\circ\rangle\]
Оскільки вага не рухається, ми знаємо, що сума сил є\(\vec 0\). Це дає:
\ [\ почати {вирівнювати*}
\ vec F +\ vec F_1 +\ vec F_2 & =
\ vec 0\\\ лангл 0, -50\ діапазон + m_1\ лангл\ cos 120^\ коло,\ sin120^\ коло\ коло + m_2\ лангель\ cos 45^\ коло,\ sin45^\ коло\ коло &=\ 0
\ end {вирівнювати*}\]
Сума записів у першому компоненті дорівнює 0, а сума записів у другому компоненті також дорівнює 0. Це призводить нас до наступних двох рівнянь:
\ [\ begin {align*}
m_1\ cos120^\ circ + m_2\ cos45^\ circ &=0\
m_1\ sin120^\ circ + m_2\ sin45^\ circ &=50
\ end {align*}\]
Це просте 2-рівняння, 2-невідома система лінійних рівнянь. Ми залишаємо це читачеві, щоб переконатися, що рішення
\[m_1=50(\sqrt{3}-1) \approx 36.6;\qquad m_2=\frac{50\sqrt{2}}{1+\sqrt{3}} \approx 25.88.\]
Може здатися дивним, що сума сил, прикладених до ланцюгів, становить більше 50 фунтів. Ми залишаємо це на уроці фізики, щоб обговорити повні деталі, але пропонуємо це коротке пояснення. Наші рівняння були встановлені так, що вертикальні складові кожної сили складають 50 фунтів, підтримуючи тим самим вагу. Так як ланцюги знаходяться під кутом, вони також тягнуться один до одного, створюючи «додаткову» горизонтальну силу, утримуючи вагу на місці.
Одиничні вектори були дуже важливими в попередньому обчисленні; вони дозволили нам визначити вектор у правильному напрямку, але з невідомою величиною. Наші обчислення потім обчислювалися компонентно. Оскільки такі обчислення часто необхідні, стандартні одиничні вектори можуть бути корисними.
Визначення 56 СТАНДАРТНІ ВЕКТОРИ ОДИНИЦІ
- В\(\mathbb{R}^2\), стандартними одиничними векторами є
\[\vec i = \langle 1,0\rangle \quad \text{and}\quad \vec j = \langle 0,1\rangle.\] - В\(\mathbb{R}^3\), стандартними одиничними векторами є
\[\vec i = \langle 1,0,0\rangle \quad \text{and}\quad \vec j = \langle 0,1,0\rangle \quad \text{and}\quad \vec k = \langle 0,0,1\rangle.\]
Приклад\(\PageIndex{7}\): Using standard unit vectors
- Перепишіть\(\vec v = \langle 2,-3\rangle\) за допомогою стандартних одиничних векторів.
- Перепишіть\(\vec w = 4\vec i - 5\vec j +2\vec k\) в складовій формі.
Рішення
- \[\begin{align}\vec v &= \langle 2,-3\rangle \\&= \langle 2,0\rangle + \langle 0,-3\rangle \\&= 2\langle 1,0\rangle -3\langle 0,1\rangle\\&= 2\vec i - 3\vec j\end{align}\]
- \[\begin{align}\vec w &= 4\vec i - 5\vec j +2\vec k\\&= \langle 4,0,0\rangle +\langle 0,-5,0\rangle + \langle 0,0,2\rangle \\&= \langle 4,-5,2\rangle\end{align}\]
Ці два приклади демонструють, що перетворення між формою компонента та стандартними векторами одиниць є досить простим. Багато математиків вважають за краще компонентну форму, і саме вона є кращою позначенням в цьому тексті. Багато інженерів вважають за краще використовувати стандартні одиничні вектори, і багато інженерних текстів використовують ці позначення.
Приклад\(\PageIndex{8}\): Finding Component Force
Вага 25 фунтів підвішується на ланцюзі довжиною 2 фути, тоді як вітер штовхає вагу вправо з постійною силою 5 фунтів, як показано на малюнку 10.28. Який кут зробить ланцюг з вертикаллю в результаті натискання вітру? Наскільки вище буде вага?
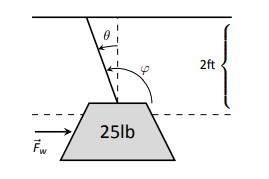
Рішення. Сила вітру представлена вектором\(\vec F_w = 5\vec i\). Сила тяжіння на вазі представлена\(\vec F_g = -25\vec j\). Напрямок і величина вектора, що представляє силу на ланцюзі, обидва невідомі. Ми представляємо цю силу з\[\vec F_c = m\langle \cos\varphi,\sin\varphi\rangle = m\cos\varphi\, \vec i + m\sin\varphi\,\vec j\] деякою величиною\(m\) і деяким кутом з горизонталлю\(\varphi\). (\(\theta\)Примітка: кут ланцюга робить з вертикаллю;\(\varphi\) кут з горизонталлю.)
Оскільки вага знаходиться при рівновазі, сума сил дорівнює\(\vec0\):
\ [\ begin {align*}
\ vec f_c +\ vec f_w +\ vec f_g &=\ vec 0\
m\ cos\ varphi\,\ vec i + m\ sin\ varphi\,\ vec j + 5\ vec i - 25\ vec j &=\ vec 0
\ end {align*}\]
Таким чином, сума\(\vec i\) і\(\vec j\) складових дорівнює 0, що призводить нас до наступної системи рівнянь:
\[5+m\cos\varphi = 0\]
\[-25+m\sin\varphi = 0\label{eq:vect8}\]
Цього достатньо, щоб визначити\(\vec F_c\) вже, як ми знаємо\(m\cos \varphi = -5\) і\(m\sin\varphi =25\). Таким чином,\(F_c = \langle -5,25\rangle.\) ми можемо використовувати це, щоб знайти величину\(m\): Потім
\[m = \sqrt{(-5)^2+25^2} = 5\sqrt{26}\approx 25.5\text{lb}.\]
ми можемо використовувати або рівність з Equation\ ref {eq:vect8} для вирішення\(\varphi\). Ми вибираємо першу рівність, оскільки використання арккосинуса поверне кут у\(2^\text{nd}\) квадранті:
\[5 + 5\sqrt{26}\cos \varphi = 0 \quad \Rightarrow \quad \varphi = \cos^{-1}\left(\frac{-5}{5\sqrt{26}}\right) \approx 1.7682\approx 101.31^\circ.\]
Віднімання\(90^\circ\) від цього кута дає нам кут\(11.31^\circ\) з вертикаллю.
Тепер ми можемо використовувати тригонометрію, щоб з'ясувати, наскільки велика вага піднімається. Діаграма показує, що прямокутний трикутник утворюється з 2-футовим ланцюгом як гіпотенуза з внутрішнім кутом\(11.31^\circ\). Довжина прилеглої сторони (на схемі пунктирна вертикальна лінія) -\(2\cos 11.31^\circ \approx 1.96\) фути. Таким чином вага піднімається приблизно на\(0.04\) фут, майже 1/2 дюйма.
Алгебра, яку ми застосували до векторів, вже демонструє себе дуже корисною. Є ще дві основні операції, які ми можемо виконати з векторами, точковим добутком та перехресним добутком. Наступні два розділи досліджуйте кожен по черзі.