6.3: Еволюція операторів та очікуваних значень
- Page ID
- 79419

Рівняння Шредінгера описує, як розвивається стан системи. Оскільки за допомогою експериментів ми маємо доступ до спостережуваних та їх результатів, цікаво знайти диференціальне рівняння, яке безпосередньо дає еволюцію значень очікувань.
Рівняння Гейзенберга
Відштовхуємося від визначення очікуваної величини і беремо її похідну wrt time.
\[\begin{align*} \frac{d\langle\hat{A}\rangle}{d t} &=\frac{d}{d t} \int d^{3} x \psi(x, t)^{*} \hat{A}[\psi(x, t)] \\[4pt] &=\int d^{3} x \frac{\partial \psi(x, t)^{*}}{\partial t} \hat{A} \psi(x, t)+\int d^{3} x \psi(x, t)^{*} \frac{\partial \hat{A}}{\partial t} \psi(x, t)+\int d^{3} x \psi(x, t)^{*} \hat{A} \frac{\partial \psi(x, t)}{\partial t} \end{align*}\]
Потім ми використовуємо рівняння Шредінгера:
\[\frac{\partial \psi(x, t)}{\partial t}=-\frac{i}{\hbar} \mathcal{H} \psi(x, t), \quad \frac{\partial \psi^{*}(x, t)}{\partial t}=\frac{i}{\hbar}(\mathcal{H} \psi(x, t))^{*} \nonumber\]
і факт\((\mathcal{H} \psi(x, t))^{*}=\psi(x, t)^{*} \mathcal{H}^{*}=\psi(x, t)^{*} \mathcal{H}\) (так як гамільтоніан - герміт\(\mathcal{H}^{*}=\mathcal{H}\)). З цим у нас
\[\begin{align*} \frac{d\langle\hat{A}\rangle}{d t}&=\frac{i}{\hbar} \int d^{3} x \psi(x, t)^{*} \mathcal{H} \hat{A} \psi(x, t)+\int d^{3} x \psi(x, t)^{*} \frac{\partial \hat{A}}{\partial t} \psi(x, t)-\frac{i}{\hbar} \int d^{3} x \psi(x, t)^{*} \hat{A} \mathcal{H} \psi(x, t) \\[4pt] &=\frac{i}{\hbar} \int d^{3} x \psi(x, t)^{*}[\mathcal{H} \hat{A}-\hat{A} \mathcal{H}] \psi(x, t)+\int d^{3} x \psi(x, t)^{*} \frac{\partial \hat{A}}{\partial t} \psi(x, t) \end{align*}\]
Тепер ми перепишемо\([\mathcal{H} \hat{A}-\hat{A} \mathcal{H}]=[\mathcal{H}, \hat{A}] \) як комутатор, а інтеграли як значення очікувань:
\[\boxed{\frac{d\langle\hat{A}\rangle}{d t}=\frac{i}{\hbar}\langle[\mathcal{H}, \hat{A}]\rangle+\left\langle\frac{\partial \hat{A}}{\partial t}\right\rangle} \nonumber\]
Це еквівалентна формулювання еволюції системи (еквівалентна рівнянню Шредінгера).
Зверніть увагу, що якщо сама спостережувана незалежна від часу, то рівняння зводиться до\(\frac{d\langle\hat{A}\rangle}{d t}=\frac{i}{\hbar}\langle[\mathcal{H}, \hat{A}]\rangle\). Тоді, якщо\( \hat{A}\) спостережуваний комутується з гамільтоном, у нас взагалі немає еволюції очікуваного значення. Спостережуваний, який їздить з гамільтоном, є постійною руху. Наприклад, ми знову бачимо, чому енергія - це константа руху (як це було видно раніше).
Зверніть увагу, що оскільки ми можемо взяти значення очікування щодо будь-якої хвильової функції, рівняння вище повинно триматися також і для самих операторів. Тоді у нас є:
\[\boxed{\frac{d \hat{A}}{d t}=\frac{i}{\hbar}[\mathcal{H}, \hat{A}]+\frac{\partial \hat{A}}{\partial t}} \nonumber\]
Це еквівалентна формулювання еволюції системи (еквівалентна рівнянню Шредінгера).
Зверніть увагу, що якщо оператор незалежний\(A\) від часу і він комутується з гамільтоном,\( \mathcal{H}\) то оператор зберігається, це константа руху (не тільки його очікуване значення).
Розглянемо, наприклад, оператор кутового моменту\(\hat{L}^{2}\) для центральної потенційної системи (тобто з потенціалом, який залежить тільки від відстані,\(V (r)\)). Ми бачили при вирішенні 3D незалежного від часу рівняння, що\(\left[\mathcal{H}, \hat{L}^{2}\right]=0 \). Таким чином, кутовий імпульс є постійною руху.
Теорема Еренфеста
Тепер ми застосовуємо цей результат для обчислення еволюції очікуваних значень для позиції та імпульсу.
\[\frac{d\langle\hat{x}\rangle}{d t}=\frac{i}{\hbar}\langle[\mathcal{H}, \hat{x}]\rangle=\frac{i}{\hbar}\left\langle\left[\frac{\hat{p}^{2}}{2 m}+V(x), \hat{x}\right]\right\rangle \nonumber\]
Тепер ми це знаємо\([V(x), \hat{x}]=0 \) і вже розрахували\( \left[\hat{p}^{2}, \hat{x}\right]=-2 i \hbar \hat{p}\). Отже, у нас є:
\[\boxed{\frac{d\langle\hat{x}\rangle}{d t}=\frac{1}{m}\langle\hat{p}\rangle} \label{ehren1} \]
Зверніть увагу, що це те саме рівняння, яке пов'язує класичне положення з імпульсом (пам'ятайте\(p/m = v\) швидкість). Тепер перейдемо до рівняння для імпульсу:
\[\frac{d\langle\hat{p}\rangle}{d t}=\frac{i}{\hbar}\langle[\mathcal{H}, \hat{p}]\rangle=\frac{i}{\hbar}\left\langle\left[\frac{\hat{p}^{2}}{2 m}+V(x), \hat{p}\right]\right\rangle \nonumber\]
Тут звичайно\( \left[\frac{\hat{p}^{2}}{2 m}, \hat{p}\right]=0\), так що нам потрібно тільки розрахувати\([V(x), \hat{p}] \). Підставляємо явний вираз на імпульс:
\ [\ begin {align*} [V (x),\ hat {p}] f (x) &= V (x)\ лівий [-i\ hbar\ frac {\ частковий f (x)} {\ частковий x}\ правий] -\ лівий [-i\ hbar\ frac {\ частковий (V (x) f (x))} {\ частковий х}\ правий]\ [4pt] &=-V (x) i\ hbar\ frac {\ часткова f (x)} {\ часткова х} +i\ hbar\ frac {\ часткова V (x)} {\ часткова х} f (x) +i\ hbar\ frac {\ часткова f (x)} {\ часткова х} V ( x) = i\ hbar\ frac {\ часткова V (x)} {\ часткова х} f (x)
\ end {align*}\]
Потім,
\[\boxed{\frac{d\langle\hat{p}\rangle}{d t}=-\left\langle\frac{\partial V(x)}{\partial x}\right\rangle} \label{ehren2}\]
Зверніть увагу, що в обох рівняннях\ ref {ehren1} і\ ref {ehren2},\(\hbar\) скасовано. Більше того, обидва рівняння включають лише дійсні змінні (як у класичній механіці).
Зазвичай похідна потенційної функції є силою, тому ми можемо писати\(-\frac{\partial V(x)}{\partial x}=F(x)\). Якби ми могли наблизити\(\langle F(x)\rangle \approx F(\langle x\rangle)\), то обидва рівняння\ ref {ehren1} і\ ref {ehren2} переписуються:
\[\frac{d\langle\hat{x}\rangle}{d t}=\frac{1}{m}\langle\hat{p}\rangle \quad \frac{d\langle\hat{p}\rangle}{d t}=F(\langle x\rangle) \nonumber\]
Це два рівняння тільки в очікуваних значеннях. Тоді ми могли б просто зробити підстановки\( \langle\hat{p}\rangle \rightarrow p\) і\(\langle\hat{x}\rangle \rightarrow x \) (тобто ідентифікувати очікувані значення операторів QM з відповідними класичними змінними). Отримаємо таким чином звичайне класичне рівняння рухів. Це теорема Еренфеста.
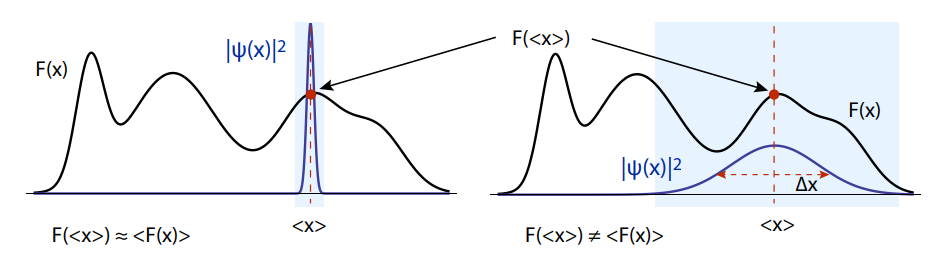
Коли наближення вище дійсне? Ми хочемо\(\left\langle\frac{\partial V(x)}{\partial x}\right\rangle \approx \frac{\partial V(\langle x\rangle)}{\partial\langle x\rangle}\). Це означає, що хвильова функція локалізована досить так, що ширина розподілу ймовірності положення мала порівняно з типовою шкалою довжини, над якою змінюється потенціал. Коли ця умова буде виконана, то очікувані значення квантово-механічної ймовірності, що спостерігаються, будуть слідувати класичній траєкторії.
Припустимо\(\psi(x) \), наприклад, є власним станом оператора позиції\( \psi(x)=\delta(x-\bar{x})\). Потім\( \langle\hat{x}\rangle=\int d x \ x \delta(x-\bar{x})^{2}=\bar{x}\) і
\[\left\langle\frac{\partial V(x)}{\partial x}\right\rangle=\int \frac{\partial V(x)}{\partial x} \delta(x-\langle x\rangle) d x=\frac{\partial V(\langle x\rangle)}{\partial\langle x\rangle} \nonumber\]
Якщо замість цього хвильова функція є пакетом, зосередженим навколо,\( \langle x\rangle\) але з кінцевою шириною\(\Delta x \) (тобто Гауссова функція), ми більше не маємо рівності, а лише наближення if\( \Delta x \ll L=\left|\frac{1}{V} \frac{\partial V(x)}{\partial x}\right|^{-1}\) (або локалізованої хвильової функції).