4.3: Прискорений рух, коли вектор швидкості змінює напрямок
- Page ID
- 75532

Однією з ключових відмінностей при одновимірному русі є те, що в двох вимірах можна мати прискорення навіть тоді, коли швидкість постійна. Нагадаємо, вектор прискорення визначається як похідна за часом вектора швидкості (Рівняння 4.1.4). Це означає, що якщо вектор швидкості змінюється з часом, то вектор прискорення ненульовий. Якщо довжина вектора швидкості (швидкості) постійна, все одно можливо, що напрямок вектора швидкості змінюється з часом, і, таким чином, що вектор прискорення ненульовий. Це, наприклад, те, що відбувається, коли об'єкт об'їжджає по колу з постійною швидкістю (змінюється напрямок вектора швидкості).
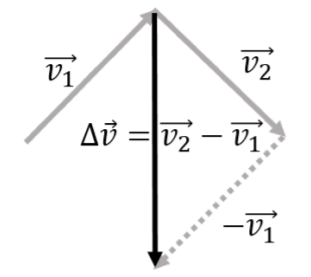
\(\PageIndex{1}\)На малюнку показано ілюстрацію вектора швидкості\(\vec v(t)\), у два різні часи\(\vec v_2\),\(\vec v_1\) і, як і різниця\(\Delta \vec v=\vec v_2 - \vec v_1\) векторів, між ними. При цьому довжина вектора швидкості не змінювалася з часом (\(||\vec v_1||=||\vec v_2||\)). Вектор прискорення задається:
\[\begin{aligned} \vec a = \lim_{\Delta t\to 0}\frac{\Delta \vec v}{\Delta t}\end{aligned}\]
і матиме напрямок паралельно\(\Delta \vec v\), і величину, яка пропорційна\(\Delta v\). Таким чином, навіть якщо вектор швидкості не змінює амплітуду (швидкість постійна), вектор прискорення може бути ненульовим, якщо вектор швидкості змінює напрямок.
Запишемо вектор швидкості\(\vec v\), через його величину\(v\), і одиничний вектор\(\hat v\), у напрямку\(\vec v\):
\[\begin{aligned} \vec v &=v_x\hat x+v_y\hat y= v \hat v\\ v&=||\vec v||=\sqrt{v_x^2+v_y^2}\\ \hat v &= \frac{v_x}{v}\hat x+\frac{v_y}{v}\hat y\\\end{aligned}\]
У самому загальному випадку як величина швидкості, так і її напрямок можуть змінюватися з часом. Тобто і напрямок, і величина вектора швидкості є функціями часу:
\[\begin{aligned} \vec v(t)&=v(t)\hat v(t)\end{aligned}\]
Коли ми беремо похідну часу\(\vec v(t)\) для отримання вектора прискорення, нам потрібно взяти похідну добутку двох функцій часу,\(v(t)\) і\(\hat v(t)\). Використовуючи правила взяття похідної добутку, вектор прискорення задається:
\[\begin{aligned} \vec a &= \frac{d}{dt}\vec v(t)= \frac{d}{dt}v(t)\hat v(t)\nonumber \end{aligned}\]
\[ \vec a = \frac{dv}{dt}\hat v(t)+v(t)\frac{d\hat v}{dt} \]
і має два терміни. Перший член,\(\frac{dv}{dt}\hat v(t)\), дорівнює нулю, якщо швидкість постійна (\(\frac{dv}{dt}=0\)). Другий член дорівнює нулю\(v(t)\frac{d\hat v}{dt}\), якщо напрямок вектора швидкості є постійним (\(\frac{d\hat v}{dt}=0\)). В цілому ж вектор прискорення має два члени, що відповідають зміні швидкості, і зміні напрямку швидкості відповідно.
Конкретна функціональна форма вектора прискорення буде залежати від шляху, який бере об'єкт. Якщо розглядати випадок, коли швидкість постійна, то маємо:
\[\begin{aligned} v(t) &= v \\ \frac{dv}{dt}&=0\\ v_x^2(t)+v_y^2(t) &=v^2 \\ \therefore v_y(t)&=\sqrt{v^2-v_x(t)^2}\end{aligned}\]
Іншими словами, якщо величина швидкості постійна, то\(x\) і\(y\) компоненти вже не є незалежними (якщо\(x\) компонент стає більше, то\(y\) компонент повинен стати менше, щоб загальна величина залишилася незмінним). Якщо швидкість постійна, то вектор прискорення задається:
\[\begin{aligned} \vec a&=\frac{dv}{dt}\hat v(t)+v\frac{d\hat v}{dt}\nonumber\\ &=0 + v\frac{d}{dt}\hat v(t)\nonumber\\ &=v\frac{d}{dt}\left(\frac{v_x(t)}{v}\hat x+\frac{v_y(t)}{v}\hat y )\right)\nonumber\\ &=\frac{dv_x}{dt}\hat x + \frac{d}{dt}\sqrt{v^2-v_x(t)^2}\hat y\nonumber\\ &=\frac{dv_x}{dt}\hat x + \frac{1}{2\sqrt{v^2-v_x(t)^2}}(-2v_x(t))\frac{dv_x}{dt}\hat y\nonumber\\ &=\frac{dv_x}{dt}\hat x - \frac{v_x(t)}{\sqrt{v^2-v_x(t)^2}}\frac{dv_x}{dt}\hat y\nonumber\\ &=\frac{dv_x}{dt}\hat x - \frac{v_x(t)}{v_y(t)}\frac{dv_x}{dt}\hat y\nonumber \end{aligned}\]
\[\vec a=\frac{dv_{x}}{dt}\left( \hat x - \frac{v_{x}(t)}{v_{y}(t)}\hat y \right)\]
де більша частина алгебри, яку ми зробили, полягала в тому, щоб відокремити\(x\) і\(y\) компоненти вектора прискорення, і ми використали Правило ланцюга, щоб взяти похідну квадратного кореня. Отриманий вектор прискорення проілюстрований на малюнку\(\PageIndex{2}\) разом з вектором швидкості 1.
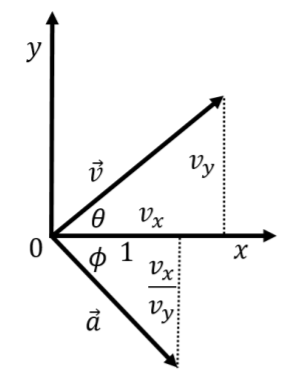
Вектор швидкості має складові\(v_x\) і\(v_y\), що дозволяє обчислити кут,\(\theta\) який він робить з\(x\) віссю:
\[\begin{aligned} \tan(\theta)=\frac{v_y}{v_x}\end{aligned}\]
Аналогічно, вектор, який паралельний прискоренню має складові\(1\) і\(-\frac{v_x}{v_y}\), що дозволяє визначити кут\(\phi\), який він робить з\(x\) віссю:
\[\begin{aligned} \tan(\phi)=\frac{v_x}{v_y}\end{aligned}\]
Зверніть увагу, що\(\tan(\theta)\) це зворотне або\(\tan(\phi)\), іншими словами, означає\(\tan(\theta)=\cot(\phi)\), що\(\theta\) і\(\phi\) є доповнюючими і, таким чином, повинні сумувати\(\frac{\pi}{2}\) (90). Це означає, що вектор прискорення перпендикулярний вектору швидкості, якщо швидкість постійна і напрямок швидкості змінюється.
Іншими словами, коли ми пишемо вектор прискорення, ми можемо виділити дві складові,\(\vec a_{\parallel}(t)\) і\(\vec a_{\perp}(t)\):
\[\begin{aligned} \vec a&=\frac{dv}{dt}\hat v(t)+v(t)\frac{d\hat v}{dt}\\ &=\vec a_{\parallel}(t) + \vec a_{\perp}(t)\\ \therefore \vec a_{\parallel}(t)&=\frac{dv}{dt}\hat v(t)\\ \therefore \vec a_{\perp}(t)&=v\frac{d\hat v}{dt}=\frac{dv_x}{dt} \left(\hat x - \frac{v_x(t)}{v_y(t)}\hat y\right)\end{aligned}\]
де\(\vec a_{\parallel}(t)\) - складова прискорення, яка паралельна вектору швидкості, і відповідає за зміну її величини, причому\(\vec a_{\perp}(t)\), є складовою, яка перпендикулярна вектору швидкості і відповідає за зміну напрямку руху.
Вправа\(\PageIndex{1}\)
Супутник рухається по круговій орбіті навколо Землі з постійною швидкістю. Що можна сказати про його векторі прискорення?
- Вона має величину нуля.
- Вона перпендикулярна вектору швидкості.
- Він паралельний вектору швидкості.
- Він знаходиться в напрямку, відмінному від паралельного або перпендикулярного вектору швидкості.
- Відповідь
Виноски
1. Швидше, це вектор, паралельний вектору прискорення, який ілюструється, оскільки коефіцієнт\(\frac{dv_{x}}{dt}\) опускався (як ви пам'ятаєте, множення на скаляр змінює тільки довжину, а не напрямок)