19.6: Кутовий момент системи частинок
- Page ID
- 75573

Тепер обчислюємо момент моменту навколо точки,\(S\) пов'язаної з системою N точкових частинок. Позначте кожну окрему частинку індексом\(j, j=1,2, \cdots, N\). Нехай\(j^{\mathrm{th}}\) частинка має масу\(m_{j}\) і швидкість\(\overrightarrow{\mathbf{V}}\). Імпульс окремої частинки тоді\(\overrightarrow{\mathbf{p}}_{j}=m_{j} \overrightarrow{\mathbf{v}}_{j}\). \(\overrightarrow{\mathbf{r}}_{S, j}\)Дозволяти вектор від точки\(S\) до\(j^{\mathrm{th}}\) частинки, і\(\theta_{j}\) нехай кут між векторами\(\overrightarrow{\mathbf{r}}_{S, j}\) і\(\overrightarrow{\mathbf{p}}_{j}\) (рис. 19.10).
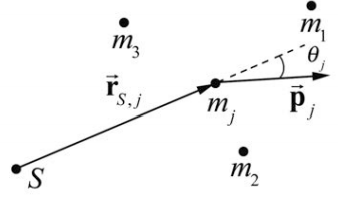
Кутовий\(\overrightarrow{\mathbf{L}}_{S, j}\) імпульс\(j^{\text {th }}\) частинки дорівнює
\[\overrightarrow{\mathbf{L}}_{S, j}=\overrightarrow{\mathbf{r}}_{S, j} \times \overrightarrow{\mathbf{p}}_{j} \nonumber \]
Кутовий момент для системи частинок - векторна сума окремих кутових моментів,
\[\overrightarrow{\mathbf{L}}_{S}^{\mathrm{sys}}=\sum_{j=1}^{i=N} \overrightarrow{\mathbf{L}}_{S, j}=\sum_{j=1}^{i=N} \overrightarrow{\mathbf{r}}_{S, j} \times \overrightarrow{\mathbf{p}}_{j} \nonumber \]
Зміна кутового моменту системи частинок близько точки\(S\) задається
\[\frac{d \overrightarrow{\mathbf{L}}_{S}^{\mathrm{sys}}}{d t}=\frac{d}{d t} \sum_{j=1}^{j=N} \overrightarrow{\mathbf{L}}_{S, j}=\sum_{j=1}^{j=N}\left(\frac{d \overrightarrow{\mathbf{r}}_{S, j}}{d t} \times \overrightarrow{\mathbf{p}}_{j}+\overrightarrow{\mathbf{r}}_{S, j} \times \frac{d \overrightarrow{\mathbf{p}}_{j}}{d t}\right) \nonumber \]
Оскільки швидкість\(j^{\text {th }}\) частинки є\(\overrightarrow{\mathbf{v}}_{S, j}=d{\mathbf{r}}_{S, j} / d t\), перший член в дужках зникає (перехресний добуток вектора з самим собою дорівнює нулю, оскільки вони паралельні один одному)
\[\frac{d \overrightarrow{\mathbf{r}}_{S, j}}{d t} \times \overrightarrow{\mathbf{p}}_{j}=\overrightarrow{\mathbf{v}}_{S, j} \times m_{j} \overrightarrow{\mathbf{v}}_{S, j}=0 \nonumber \]
Рівняння заміни (19.5.4) і\(\overrightarrow{\mathbf{F}}_{j}=d \overrightarrow{\mathbf{p}}_{j} / d t\) в рівняння (19.5.3), що дає
\[\frac{d \overrightarrow{\mathbf{L}}_{S}^{\mathrm{sys}}}{d t}=\sum_{j=1}^{i=N}\left(\overrightarrow{\mathbf{r}}_{S, j} \times \frac{d \overrightarrow{\mathbf{p}}_{j}}{d t}\right)=\sum_{j=1}^{i=N}\left(\overrightarrow{\mathbf{r}}_{S, j} \times \overrightarrow{\mathbf{F}}_{j}\right) \nonumber \]
Тому що
\[\sum_{j=1}^{j=N}\left(\overrightarrow{\mathbf{r}}_{S, j} \times \overrightarrow{\mathbf{F}}_{j}\right)=\sum_{j=1}^{j=N} \vec{\tau}_{S, j}=\vec{\tau}_{S}^{\mathrm{ext}}+\vec{\tau}_{S}^{\mathrm{int}} \nonumber \]
Ми вже показали в главі 17.4, що коли ми припускаємо, що всі внутрішні сили спрямовані τ уздовж лінії, що з'єднує два взаємодіючих об'єкта, то внутрішній крутний момент навколо точки\(S\) дорівнює нулю,
\[\vec{\tau}_{S}^{\mathrm{int}}=\overrightarrow{\boldsymbol{0}} \nonumber \]
Рівняння (19.5.6) спрощує
\[\sum_{j=1}^{i=N}\left(\overrightarrow{\mathbf{r}}_{S, j} \times \overrightarrow{\mathbf{F}}_{j}\right)=\sum_{j=1}^{j=N} \vec{\tau}_{S, j}=\vec{\tau}_{S}^{\mathrm{ext}} \nonumber \]
Тому рівняння (19.5.5) стає
\[\vec{\tau}_{S}^{\mathrm{ext}}=\frac{d \overrightarrow{\mathbf{L}}_{S}^{\mathrm{sys}}}{d t} \nonumber \]
Зовнішній крутний момент\(S\) навколо точки дорівнює тимчасовій похідній моменту моменту системи про цю точку.
Приклад\(\PageIndex{1}\): Angular Momentum of Two Particles undergoing Circular Motion
Дві однакові частинки масою m рухаються по колу радіусом R\(\vec{\omega}=\omega_{z} \hat{\mathbf{k}}, \omega_{z}>0\), з кутовою швидкістю,\(\omega\) навколо осі z в площині, паралельній відстані h над площиною x-y. Частинки розташовуються з протилежних сторін кола (рис. 19.11). Знайдіть величину і напрямок кутового моменту про точку\(S\) (початок).

Рішення
Кутовий момент про походження - це сума внесків від кожного об'єкта. Розрахунок кожного внеску буде ідентичним розрахунку в прикладі 19.3

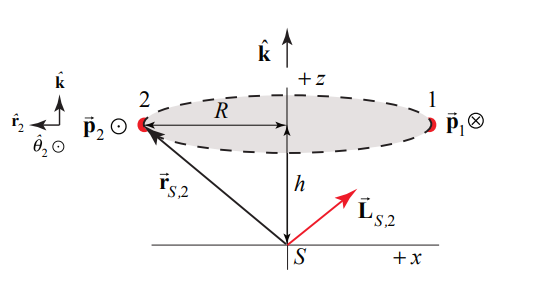
Для частинки 1 (рис. 19.12) кутовий момент моменту навколо точки\(S\) дорівнює
\[\overrightarrow{\mathbf{L}}_{S, 1}=\overrightarrow{\mathbf{r}}_{S, 1} \times \overrightarrow{\mathbf{p}}_{1}=\left(R \hat{\mathbf{r}}_{1}+h \hat{\mathbf{k}}\right) \times m R \omega_{z} \hat{\mathbf{\theta}}_{1}=m R^{2} \omega_{z} \hat{\mathbf{k}}-h m R \omega_{z} \hat{\mathbf{r}}_{1} \nonumber \]
Для частинки 2 (рис. 19.13) кутовий момент моменту навколо точки\(S\) дорівнює
\[\overrightarrow{\mathbf{L}}_{S, 2}=\overrightarrow{\mathbf{r}}_{S, 2} \times \overrightarrow{\mathbf{p}}_{2}=\left(R \hat{\mathbf{r}}_{2}+h \hat{\mathbf{k}}\right) \times m R \omega_{z} \hat{\mathbf{\theta}}_{2}=m R^{2} \omega_{z} \hat{\mathbf{k}}-h m R \omega_{z} \hat{\mathbf{r}}_{2} \nonumber \]
Тому що частинки розташовані по протилежних сторонам кола,\(\hat{\mathbf{r}}_{1}=-\hat{\mathbf{r}}_{2}\). Векторна сума лише вказує вздовж осі z і дорівнює
\[\overrightarrow{\mathbf{L}}_{s}=\overrightarrow{\mathbf{L}}_{S, 1}+\overrightarrow{\mathbf{L}}_{S, 2}=2 m R^{2} \omega_{z} \hat{\mathbf{k}} \nonumber \]
Два вектори кутового моменту показані на малюнку 19.14.

Момент інерції двох частинок навколо осі z задається\(I_{S}=2 m R^{2}\). Тому\(\overrightarrow{\mathbf{L}}_{S}=I_{S} \vec{\omega}\). Важливим моментом цього прикладу є те, що два об'єкти симетрично розподілені по відношенню до осі z (протилежні сторони кругової орбіти). Тому кутовий момент навколо будь-якої точки\(S\) вздовж осі z має однакове значення,\(\overrightarrow{\mathbf{L}}_{s}=2 m r^{2} \omega \hat{\mathbf{k}}\) яке є постійним за величиною і вказує в + z -напрямку. Цей результат узагальнюється до будь-якого жорсткого тіла, в якому маса розподілена симетрично щодо осі обертання.
Приклад\(\PageIndex{2}\): Angular Momentum of a System of Particles about Different Points
Розглянемо систему з N частинок, а також дві точки А і В (рис. 19.15). Кутовий імпульс\(j^{i h}\) частинки близько точки А задається
\[\overrightarrow{\mathbf{L}}_{A, j}=\overrightarrow{\mathbf{r}}_{A, j} \times m_{j} \overrightarrow{\mathbf{v}}_{j} \nonumber \]

Кутовий момент системи частинок про точку А задається сумою
\[\overrightarrow{\mathbf{L}}_{A}=\sum_{j=1}^{N} \overrightarrow{\mathbf{L}}_{A, j}=\sum_{j=1}^{N} \overrightarrow{\mathbf{r}}_{A, j} \times m_{j} \overrightarrow{\mathbf{v}}_{j} \nonumber \]
Кутовий момент навколо точки В може бути розрахований аналогічним чином і задається
\[\overrightarrow{\mathbf{L}}_{B}=\sum_{j=1}^{N} \overrightarrow{\mathbf{L}}_{B, j}=\sum_{j=1}^{N} \overrightarrow{\mathbf{r}}_{B, j} \times m_{j} \overrightarrow{\mathbf{v}}_{j} \nonumber \]
З малюнка 19.15 вектори
\[\overrightarrow{\mathbf{r}}_{A, j}=\overrightarrow{\mathbf{r}}_{B, j}+\overrightarrow{\mathbf{r}}_{A, B} \nonumber \]
Ми можемо замінити рівняння (19.5.14) на рівняння (19.5.12), що дає
\[\overrightarrow{\mathbf{L}}_{A}=\sum_{j=1}^{N}\left(\overrightarrow{\mathbf{r}}_{B, j}+\overrightarrow{\mathbf{r}}_{A, B}\right) \times m_{j} \overrightarrow{\mathbf{v}}_{j}=\sum_{j=1}^{N} \overrightarrow{\mathbf{r}}_{B, j} \times m_{j} \overrightarrow{\mathbf{v}}_{j}+\sum_{j=1}^{N} \overrightarrow{\mathbf{r}}_{A, B} \times m_{j} \overrightarrow{\mathbf{v}}_{j} \nonumber \]
Перший член у Рівнянні (19.5.15) - це кутовий момент навколо точки B. Вектор\(\overrightarrow{\mathbf{r}}_{A, B}\) є константою і тому може бути витягнутий з суми у другому семестрі, а Рівняння (19.5. 15) стає
\[\overrightarrow{\mathbf{L}}_{A}=\overrightarrow{\mathbf{L}}_{B}+\overrightarrow{\mathbf{r}}_{A, B} \times \sum_{j=1}^{N} m_{j} \overrightarrow{\mathbf{v}}_{j} \nonumber \]
Сума в другому семестрі - імпульс системи
\[\overrightarrow{\mathbf{p}}_{\mathrm{sys}}=\sum_{j=1}^{N} m_{j} \overrightarrow{\mathbf{v}}_{j} \nonumber \]
Тому кутовий імпульс про точки А і В пов'язані між собою
\[\overrightarrow{\mathbf{L}}_{A}=\overrightarrow{\mathbf{L}}_{B}+\overrightarrow{\mathbf{r}}_{A, B} \times \overrightarrow{\mathbf{p}}_{\mathrm{sys}} \nonumber \]
Таким чином, якщо імпульс системи дорівнює нулю, кутовий момент однаковий щодо будь-якої точки.
\[\overrightarrow{\mathbf{L}}_{A}=\overrightarrow{\mathbf{L}}_{B}, \quad\left(\overrightarrow{\mathbf{p}}_{\mathrm{sys}}=\overrightarrow{\mathbf{0}}\right) \nonumber \]
Зокрема, імпульс системи частинок дорівнює нулю за визначенням у центрі системи відліку мас, оскільки в цій системі відліку\(\overrightarrow{\mathbf{p}}_{\mathrm{sys}}=\overrightarrow{\mathbf{0}}\). Звідси кутовий імпульс однаковий щодо будь-якої точки в центрі системи відліку маси.