10,8: роторні двигуни
- Page ID
- 78484

Більшість справжніх двигунів, звичайно, є роторними двигунами, хоча всі принципи, описані для нашого високо ідеалізованого лінійного двигуна Розділу 10.7, все ще застосовуються.
Струм подається в котушку (відому як якоря) через комутатор з роздільним кільцем, і тому котушка розвиває магнітний момент. Котушка знаходиться в магнітному полі, і тому вона відчуває крутний момент. (Рис. X.5) Котушка обертається, і незабаром її вектор магнітного моменту буде паралельний полю і не буде подальшого крутного моменту - за винятком того, що в цей момент комутатор з роздільним кільцем змінює напрямок струму в котушці, а отже, змінює напрямок магнітного моменту. Таким чином, котушка продовжує обертатися до тих пір, поки через півперіоду її новий магнітний момент знову не вирівнюється з магнітним полем, і комутатор знову змінює напрямок моменту.
Як і у випадку з лінійним двигуном, котушка досягає максимальної кутової швидкості, яка залежить від механічного навантаження (на цей раз крутного моменту), а співвідношення між максимальною кутовою швидкістю та крутним моментом є характеристикою роботи двигуна.
Також, як і у генератора, може бути кілька котушок (з відповідною кількістю секцій в комутаторі), а також можна конструювати двигуни, в яких якоря є статор, а магніт ротор - але я не особливо обізнаний про детальні інженерні конструкції реальних двигунів - за винятком того, що всі вони залежать від одних і тих же наукових принципів.
У всьому вищесказаному передбачалося, що магнітне поле постійне, ніби вироблене постійним магнітом. У реальних двигунів поле, як правило, виробляється електромагнітом. (Деякі види заліза зберігають свій магнетизм постійно, якщо свідомо не розмагнічуються. Інші намагнічуються лише при розміщенні в сильному магнітному полі, наприклад, виробленому соленоїдом, і вони втрачають більшу частину своєї намагніченості, як тільки поле намагнічування видаляється.)
Польові котушки можуть бути намотані послідовно з котушкою якоря (послідовно намотаним двигуном) або паралельно з нею (шунт-мотор), або навіть частково послідовно і частково паралельно (складно-намотаний двигун). Кожна конструкція має свою експлуатаційну характеристику, в залежності від використання, для якого вона призначена.
При одній котушці, що обертається в магнітному полі, індукована зворотна ЕРС періодично змінюється, середнє значення, як ми бачили,\(2NAB \omega / \pi\). На практиці котушка може бути намотана навколо багатьох прорізів, розміщених по периметру циліндричного сердечника кожні кілька градусів, і в комутаторі з роздільним кільцем є відповідна кількість секцій. Задня ЕРС тоді менш змінна, ніж з однією котушкою, і, хоча\(2NAB \omega / \pi\) формула більше не підходить, задня ЕРС все ще пропорційна\(B \omega\). Ми можемо записати середню зворотну ЕРС як\(KB\omega\), де постійна двигуна\(K\) залежить від детальної геометрії конкретної конструкції.
Шунтові двигуни
У шунтонамотанном двигуні польова котушка намотана паралельно котушці якоря. При цьому задня ЕРС, що генерується в якорі, не впливає на струм в котушці поля, тому двигун працює швидше, як описано раніше для постійного поля. Тобто експлуатаційна характеристика двигуна, що дає рівноважну кутову швидкість в плані механічного навантаження (крутного моменту,\(\tau\)), задається
\[\label{10.8.1}\omega=\frac{E}{KB}-\frac{R}{(KB)^2}\tau .\]
Тут\(R\) знаходиться опір якоря. На практиці може бути змінний опір (реостат) послідовно з котушкою поля, так що струм через котушку поля - а отже, і напруженість поля - може бути змінений.
Серійно-намотані двигуни
Серія намотування двигуна. Польова котушка намотана послідовно з якорем, а характеристика роботи двигуна досить інша, ніж для шунтового двигуна. Якщо сердечник магніту не насичується, то, до лінійного наближення, поле пропорційно струму, а задня ЕРС пропорційна добутку струму\(I\) і кутової швидкості\(\omega\) - так скажімо, що задня ЕРС є\(kI\omega\). У нас тоді є
\[\label{10.8.2}E-kI\omega = IR,\]
де\(E\) зовнішньо застосовується ЕРС (від акумулятора, наприклад) і\(R\) є сумарним опором польової котушки плюс якоря.
Помножте обидві сторони на\(I\):
\[\label{10.8.3}EI-kI^2\omega = I^2 R.\]
Термін\(EI\) - це потужність, що подається батареєю, і\(I^2 R\) це потужність, що розсіюється як тепло. Таким чином швидкість виконання механічної роботи становить\(kI^2\omega\), що показує, що крутний момент, що чиниться двигуном, є\(\tau = kI^2\). Якщо ми тепер\(\sqrt{\tau / k}\) підставимо\(I\) в Equation\ ref {10.8.2}, то отримаємо характеристику продуктивності двигуна — тобто відношення між\(\omega \text{ and }\tau\):
\[\label{10.8.4}\omega = \frac{E}{\sqrt{k\tau}}-\frac{R}{k}.\]
На малюнку Х.8 ми показуємо експлуатаційні характеристики, в довільних одиницях, для шунтуючих і послідовно намотаних двигунів, заснованих на нашому лінійному аналізі, який передбачає в обох випадках відсутність насичення залізного сердечника електромагніту. Максимально можливий крутний момент в обох випадках - це крутний момент, який робить\(\omega = 0\) у відповідній характеристиці продуктивності, а саме\(KBE/R\) для шунтового двигуна і\(kE^2 /R\) для послідовно намотаного двигуна. Остання йде в нескінченність для нульового навантаження. На практиці цього не відбувається, тому що ми зробили деякі припущення, які не є реальними (наприклад, відсутність насичення магнітосердечника, а також ніколи не може бути буквально нульового навантаження), але тим не менше аналізу достатньо, щоб показати загальні характеристики двох типів.
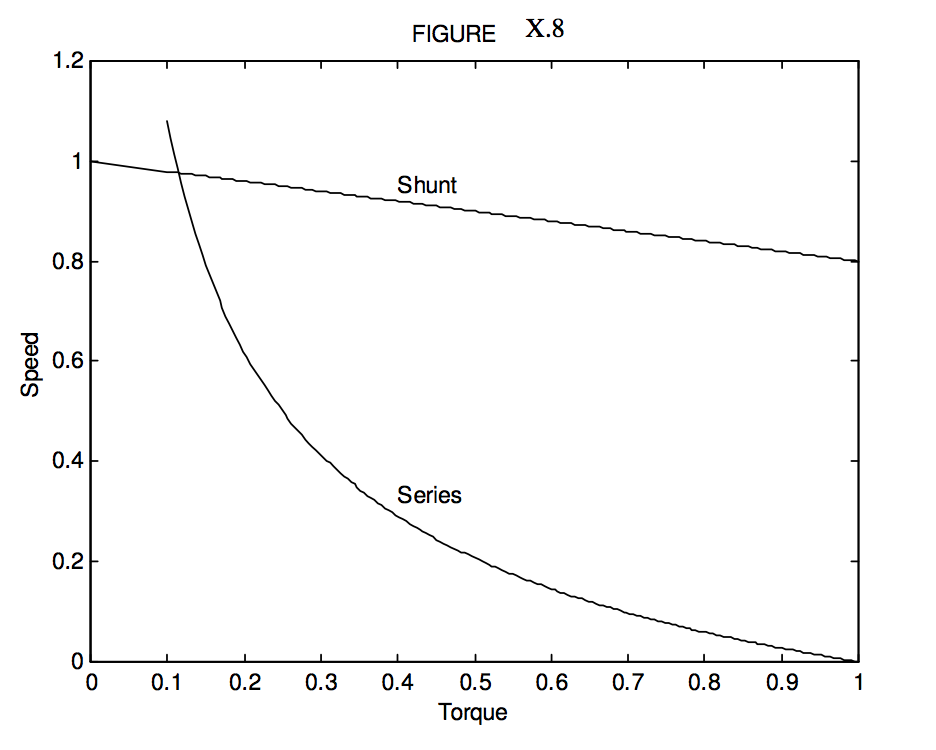
\(\text{FIGURE X.8}\)
Характеристики цих двох можуть бути об'єднані в з'єднаному двигуні, залежно від передбачуваного застосування. Наприклад, магнітофон вимагає постійної швидкості, тоді як автомобільний стартер вимагає високого пускового моменту.