1.5: Гіпотеза Ейлера-Бернуллі
- Page ID
- 33080

У цьому розділі часто робиться посилання на вісь балки. Значення осі балки інтуїтивно зрозуміле для призматичної балки з прямокутним перетином. Вона є середньою віссю. Інші терміни, такі як: нейтральна вісь, вісь згинання та центроїдальна вісь також часто використовуються. Всі вони виражають ту ж властивість, що ніякі осьові напруги не\(\sigma_{xx}\) повинні розвиватися на осі при чистому вигині.
Гіпотеза 1: План залишається площиною
Це проілюстровано на малюнку (\(\PageIndex{1}\)), що показує довільне перетин балки до і після деформації.
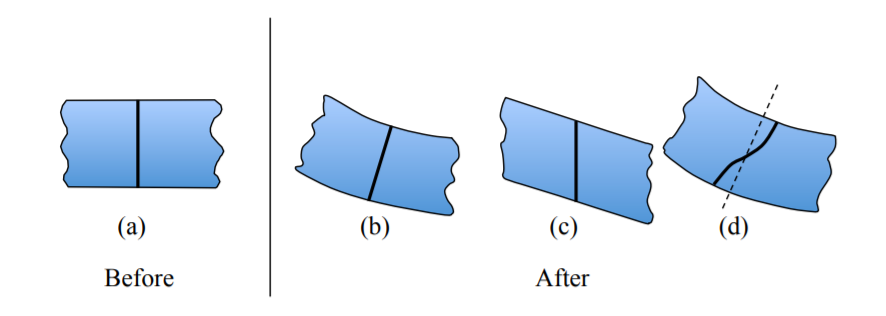
Уявіть собі прямий розріз, зроблений крізь недеформовану балку. Гіпотеза площини залишків площини означає, що всі матеріальні точки на вихідному розрізі вирівнюються також на площині в деформованому балці. Випадки (b) і (c) підкоряються гіпотезі, але викривлений розділ (d) порушує її.
Гіпотеза 2: Нормальний залишається нормальним
Якщо початковий розріз був зроблений під прямим кутом деформованої осі балки, як на малюнку\(\PageIndex{2}\) (а)), він повинен залишатися нормальним до деформованої осі, див. Рис.\(\PageIndex{2}\) (b)).
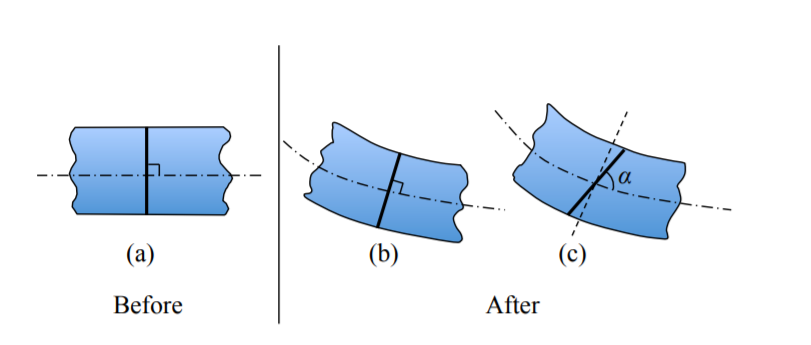
У ескізі на малюнку\(\PageIndex{2}\) (в)) гіпотеза порушується при куті\(\alpha \neq 90^{\circ}\).
Гіпотеза Ейлера-Бернуллі породжує витончену теорію нескінченно малих деформацій в балках з довільними перерізами та навантаженням у двох позаплощинних напрямках. Зацікавлений читач посилається на кілька монографій з детальною обробкою предмета, двоосьового навантаження балок. Справжній набір заміток на балках розроблений за припущенням площинної деформації. Це означає, що рух осі променя обмежується лише однією площиною.
Математично гіпотеза 1 задовольняється, коли u-компонент вектора зміщення є лінійною функцією\(z\).
\[u(z) = u^{\circ} - \theta z \text{ at any x} \label{2.35}\]
Постійний перший член,\(u^{\circ}\) - це зміщення осі балки (за рахунок осьової сили). Другий термін обумовлений одним вигином, рис. (\(\PageIndex{3}\)).
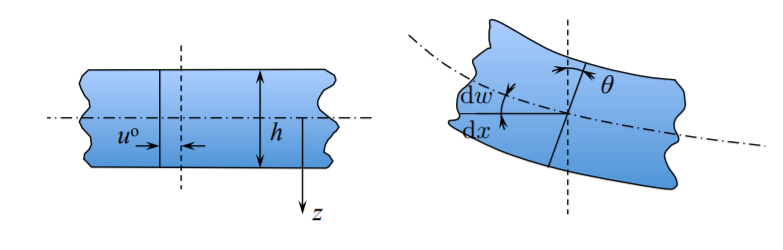
Друга гіпотеза Ейлера-Бернуллі задовольняється, якщо обертання деформованого перерізу\(\theta\) дорівнює локальному ухилу зігнутої середньої осі.\(\frac{ d w}{ d x}\)
\[\theta = \frac{ d w}{ d x} \label{2.36}\]
Усунення кута повороту θ між рівняннями\ ref {2.35} та\ ref {2.36} дає
\[u(x, z) = u^{\circ} - \frac{ d w}{ d x}z \label{2.37}\]
З рисунка (\(\PageIndex{3}\)) видно, що зміщення в нижній (розтягнутій) стороні балки є від'ємним, що пояснює знак мінус у другому семестрі Рівняння\ ref {2.36} і\ ref {2.37}.
Гіпотеза 3
Форма поперечного перерізу і розмір бруса залишаються незмінними. Це означає, що вертикальна складова вектора зміщення не залежить від\(z\) -координати. Всі точки поперечного перерізу переміщаються на однакову величину.
\[w = w(x) \label{2.38}\]
У разі площинної деформації, яка охоплює більшість практичних випадків відгуку променя,\(y\) -складова вектора зміщення зникає
\[v = 0\]
Тепер ми в змозі обчислити всі складові тензора деформації з Рівняння (1.2.10)
\[\epsilon_{xx} = \frac{ d u_{x}}{ d x} = \frac{ d u}{ d x}\]
\[\epsilon_{zz} = \frac{ d u_{y}}{ d y} = \frac{ d v}{ d y} = 0 \text{ on account of } \ref{2.42}\]
\[\epsilon_{zz} = \frac{ d u_{zz}}{ d z} = \frac{ d w(x)}{ d z} = 0 \text{ from } \ref{2.38}\]
\[\epsilon_{xy} = \frac{1}{2} \left(\frac{ d u_{x}}{ d y} + \frac{ d u_y}{ d x} \right) = 0 \text{ from } \ref{2.37} \text{ and } \ref{2.42}\]
\[\epsilon_{yz} = \frac{1}{2} \left(\frac{ d u_{y}}{ d z} + \frac{ d u_z}{ d y} \right) = \frac{1}{2} \left(\frac{ d v}{ d z} + \frac{ d w}{ d y} \right) = 0 \]
\[\begin{align} \epsilon_{zx} & = \frac{1}{2} \left(\frac{ d u_{z}}{ d x} + \frac{ d u_x}{ d z} \right) = \frac{1}{2} \left(\frac{ d w}{ d x} + \frac{ d u}{ d z} \right) \\ & = \frac{1}{2} \left(\frac{ d w}{ d x} - \frac{ d w}{ d x} \right) = 0 \nonumber \end{align}\]
Видно, що всі компоненти тензора деформації зникають, крім тієї, що знаходиться у напрямку осі пучка.
Зауважте, що\(\epsilon_{xx}\) це єдиний компонент тензора деформації в теорії елементарного пучка. Тому індекс «\(xx\)» може бути скинутий і, якщо не вказано інше\(\epsilon_{xx} = \epsilon\). Введення рівняння\ ref {2.37} в рівняння\ ref {2.38} отримує
\[\epsilon (x, z) = \frac{ d u^{\circ}(x)}{ d x} - \frac{ d ^2w(x)}{ d x^2}z\]
Перший член являє собою деформацію, що виникає при рівномірному розширенні всього поперечного перерізу.
\[\epsilon^{\circ}(x) = \frac{ d u^{\circ}(x)}{ d x} \label{2.42}\]
Другий термін додає внесок згинання. Введення визначення кривизни осі балки
\[\kappa \buildrel \rm {def} \over{=} −\frac{ d ^2w(x)}{ d x^2},\]
вираз для штаму можна поставити в кінцевому вигляді:
\[\epsilon(x, z) = \epsilon^{\circ}(x) + z\kappa\]
Математично кривизна визначається як градієнт нахилу кривої. Знак мінуса в Рівнянні (1.3.4) випливає з суворого опису кривизни прямої в передбачуваній системі координат. Фізично він передбачає, що напруги на розтягує стороні балки позитивні. Зовсім інша інтерпретація гіпотези Ейлера-Бернуллі пропонується шляхом розгляду двотермінового розширення точного профілю деформації в ряді Тейлора навколо точки.
\[\epsilon(x, z) = \epsilon(x, z) = |_{z=0} + \left. \frac{ d {\epsilon}}{ d z}\right|_{z=0} z + \left. \frac{1}{2}\frac{ d ^2 \epsilon} { d z^2}\right|_{z=0} z^2 + \ldots\]
Взяття лише перших двох членів є хорошим інженерним наближенням, але призводить до деяких внутрішніх невідповідностей теорії елементарного пучка. Ці невідповідності будуть пояснені в двох наступних розділах.