1.4: Кінематика теорії елементарного пучка
- Page ID
- 33096

Слово «кінематика» походить від грецького слова «кінема», що означає руху, рух. Будь-який рух тіла передбачає\(u_i\) зсуви, їх\(du_i\) прирости і швидкості\(\dot{u}_i\). Якщо виключити переклади і обертання жорсткого тіла, розвиваються деформації. Ми часто говоримо «Кінематичне припущення» або «Кінематичні граничні умови» або «Кінематичні величини» тощо Все це означає, що висловлювання робляться про зміщення та деформації та/або їх швидкості. На відміну від цього, слово «статичний» зарезервовано для опису напружень та/або сил, навіть якщо тіло може рухатися. Справа в тому, що для статично визначених конструкцій можна було визначити напруження і сили, не викликаючи руху. Такі вирази, як «статична формулювання», «статичні граничні умови», «статичні величини» завжди відносяться до напружень і сил.
Elementary - це ще одне слово в назві цього розділу, яке вимагає пояснення. Балка - це струнка конструкція, яка може бути стиснута, витягнута або зігнута. Балка повинна піддаватися поперечному навантаженню (перпендикулярно її осі). Інакше це стає чимось іншим, як пояснено на малюнку (\(\PageIndex{1}\)).
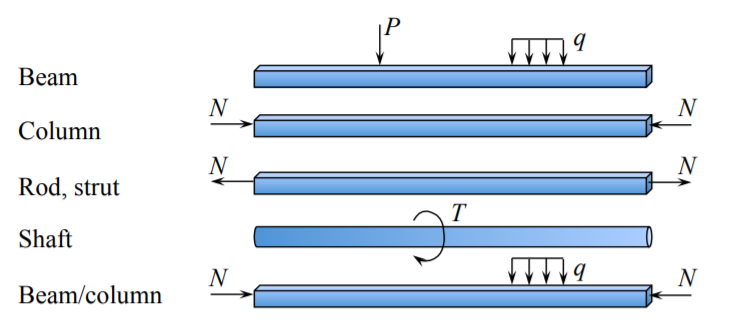
Всі перераховані вище конструкції можуть володіти подібною стрункістю. Наскільки стрункою має бути конструкція, щоб стати пучком. Стрункість визначається як відношення довжини до товщини\(\frac{l}{h}\). Якщо\(\frac{l}{h} > 20\), балка підпорядковується спрощеним кінематичним припущенням і називається вона «балкою Ейлера». Набагато коротші балки з\(\frac{l}{h} < 10\) розвиваються значними напруженнями зсуву на додаток до напружень вигину і повинні бути оброблені іншим набором припущень. Такі балки іменуються балками Тимошенко. Проміжним діапазоном\(10 < \frac{l}{h} < 20\) є сіра область, де спрощені припущення теорії елементарного променя поступово втрачають дійсність.
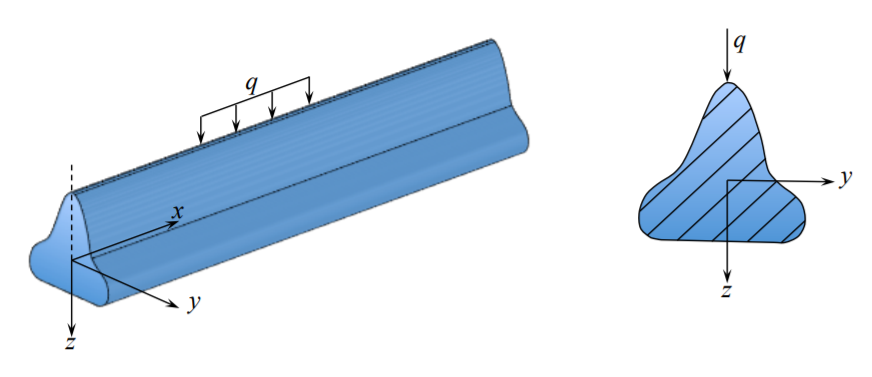
У цьому розділі розглядаються балки суцільного перетину, на відміну від тонкостінних секцій. У цих конспектах лекцій послідовно використовується прямокутна\((x, y, z)\) праворучна система координат. Вісь Х спрямована по довжині балки з початком в зручне місце розташування, як правило, кінець центру балки. Вісь Y знаходиться в напрямку ширини своїм початком на площині симетрії поперечного перерізу, рис. (\(\PageIndex{2}\)). Нарешті, вісь z спрямована вниз і вимірюється від центроїдальної осі поперечного перерізу (див. Декламація 2 для визначення центроїдальної осі).
У будівельній механіці складові вектора зміщення в\(x\)\(y\), і\(z\) напрямки позначаються відповідно\((u, v, w)\). Розвиток теорії елементарного пучка ґрунтується на трьох кінематичних припущеннях. Додаткові припущення щодо стресового стану будуть введені пізніше.