9.8: Приклади
- Page ID
- 74582

Це була довга глава, частково тому, що вона містить ряд корисних відпрацьованих прикладів; тому, будь ласка, переконайтеся, що не залишайте їх поза увагою! Розділ 9.2 показав пару прикладів завдань, які можна вирішити за допомогою збереження кутового моменту. Розділ 9.3 показує вам, як встановити та розв'язати рівняння рівноваги для нахиленої сходи, яка є архетипом всіх статичних задач; а розділ 9.4 також вирішує для вас проблему загального об'єкта, що скочується по похилій площині.
Перші кілька додаткових прикладів у цьому розділі показують, що вам потрібно налаштувати та вирішити рівняння руху для дещо більш складних систем, і вам слід уважно їх вивчити.
Приклад\(\PageIndex{1}\): Torques and forces on the wheels of an accelerating bicycle
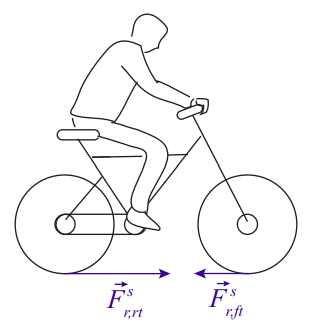
Розглянемо розгінний велосипед. Райдер надає крутний момент на педалі, який передається на заднє колесо ланцюгом (можливо посилюється шестернями і т.д.). Як цей «приводний» крутний момент на задньому колесі (називають його\(\tau_d\)) ставиться до кінцевого розгону центру мас велосипеда?
Рішення
Потрібно спочатку розібратися, з якою кількістю зовнішніх сил, як мінімум, нам доведеться мати справу. У міру розгону велосипеда відбуваються дві речі: колеса (обидва колеса) обертаються швидше, тому на кожному колесі повинен бути чистий крутний момент (за годинниковою стрілкою, якщо велосипед розганяється вправо); і центр маси системи прискорюється, тому повинна бути чиста зовнішня сила на ціла система. Система тільки контактує з дорогою, і тому, поки не відбувається прослизання, єдиним зовнішнім джерелом крутних моментів або сил на колесах повинна бути сила статичного тертя між шинами і дорогою.
Для переднього колеса це фактично єдина зовнішня сила, і єдина сила будь-якого роду, яка надає крутний момент на це колесо (є сили, що діють на вісь, але вони не надають крутного моменту навколо осі). Так як крутний момент повинен бути за годинниковою стрілкою, то, сила статичного тертя на переднє колесо, прикладена так, як воно знаходиться в місці зіткнення з дорогою, повинна бути спрямована назад, тобто навпаки напрямку руху. Тоді ми отримуємо одне рівняння руху (типу (9.4.7)) для цього колеса:
\[ -F_{r, f t}^{s} R=I \alpha \label{eq:9.44} \]
де індекс «ft» означає «передня шина», а колесо повинно мати радіус\(R\) і момент інерції\(I\).
Для заднього колеса у нас є «приводний крутний момент»\(\tau_d\), що чиниться ланцюгом, і інший крутний момент, що чиниться силою статичного тертя\(\vec F^s_{r,rt}\), між цією шиною та дорогою. Однак тепер сила\(\vec F^s_{r,rt}\) повинна вказувати вперед. Це пов'язано з тим, що чиста зовнішня сила на всій системі велосипед-райдер є\(\vec{F}_{r, r t}^{s}+\vec{F}_{r, f t}^{s}\), і це повинно вказувати вперед, або центр маси ніколи не може прискорюватися в цьому напрямку. Оскільки ми встановили, що\(F^s_{r,f t}\) має вказувати назад, випливає, що\(F^s_{r,rt}\) потрібно бути більшим і в прямому напрямку. Це означає, що ми отримуємо для центру прискорення маси рівняння (\(F_{net} = M a_{cm}\))
\[ F_{r, r t}^{s}-F_{r, f t}^{s}=M a_{c m} \label{eq:9.45} \]
а для заднього колеса рівняння крутного моменту
\[ F_{r, r t}^{s} R-\tau_{d}=I \alpha \label{eq:9.46} .\]
Я дотримуюся конвенції, що крутні моменти за годинниковою стрілкою є негативними, а також що символ сили без стрілки зверху представляє величину сили. Якщо кутове прискорення за годинниковою стрілкою аналогічно негативне, умова кочення без ковзання [Рівняння (9.6.4)] потрібно записати як
\[ a_{cm} = -R \alpha \label{eq:9.47} .\]
Це все рівняння, з якими нам потрібно пов'язати прискорення\(\tau_d\). Ми можемо почати з розв'язання (\ ref {eq:9.44})\(F^s_{r,f t}\) і підстановки в (\ ref {eq:9.45}), потім аналогічним чином розв'язуючи (\ ref {eq:9.46})\(F^s_{r,rt}\) і підставляючи в (\ ref {eq:9.45}). Результат -
\[ \frac{I \alpha+\tau_{d}}{R}+\frac{I \alpha}{R}=M a_{c m} \label{eq:9.48} \]
потім використовуйте Eq (\ ref {eq:9.47}) для запису\(\alpha = −a_{cm}/R\) та вирішення для\(a_{cm}\):
\[ a_{c m}=\frac{\tau_{d}}{M R+2 I / R} \label{eq:9.49} \]
Приклад\(\PageIndex{2}\): Blocks connected by rope over a pulley with non-zero mass
Розглянемо знову настройку, проілюстровану на малюнку 6.3.1, але тепер припустимо, що шків має масу\(M\) і радіус\(R\). Для простоти залиште силу тертя назовні. Що ж таке зараз прискорення системи?
Рішення
На малюнку нижче показано налаштування, плюс діаграми вільного тіла для двох блоків (вертикальні сили на блоці 1 були залишені, щоб уникнути захаращення фігури, оскільки вони тут не актуальні) та розширена діаграма вільного тіла для шківа. (Ви можете бачити з діаграми шківа, що має бути інша сила, що діє на нього, щоб збалансувати дві показані сили. Це була б контактна сила на осі, спрямована вгору і вліво. Якби це була проблема статики, мені довелося б її включити, але оскільки вона не надає крутного моменту навколо осі обертання, це не сприяє динаміці системи, тому я також її залишив.)
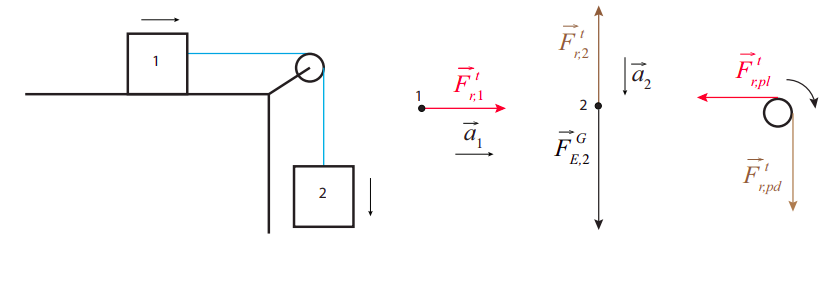
Ключовою новою особливістю цієї проблеми є те, що натяг на струні має мати різні значення по обидва боки шківа, тому що на шківі повинен бути чистий крутний момент. Отже, ліва сила на шківі (\(F^t_{r,pl}\)) повинна бути меншою, ніж сила вниз (\(F^t_{r,pd}\)).
З іншого боку, поки маса мотузки мізерно мала, все одно буде так, що горизонтальна частина мотузки буде тягнути з однаковою силою на блоці 1 і на шківі, і аналогічно вертикальна частина мотузки буде тягнути з однаковою силою на шківі і на блоці 2. (Щоб зробити цей момент зрозумілішим, у мене є «кольорові» ці відповідні сили на малюнку.) Це означає, що ми можемо записати\(F^t_{r,pl} = F^t_{r,1}\) і\(F^t_{r,pd} = F^t_{r,2}\), і записати рівняння крутного моменту (9.4.7) для шківа як
\[ F_{r, 1}^{t} R-F_{r, 2}^{t} R=I \alpha \label{eq:9.50} .\]
У нас також є\(F = ma\) для кожного блоку:
\[ F_{r, 1}^{t}=m_{1} a \label{eq:9.51} \]
\[ F_{r, 2}^{t}-m_{2} g=-m_{2} a \label{eq:9.52} \]
де я\(a\) взяв бути\(a = |\vec{a}_1| = |\vec{a}_2|\). Умова кочення без ковзання, рівняння (9.6.4), прикладене до шківа, дає потім
\[ -R \alpha = a \label{eq:9.53} \]
оскільки, в показаній ситуації,\(\alpha\) буде негативною, і\(a\) була визначена як позитивна. Заміна Eqs. (\ ref {еква:9.51}), (\ ref {еква:9.52}), і (\ ref {еква:9.53}) в (\ ref {еква:9.50}), ми отримуємо
\[ m_{1} a R-\left(m_{2} g-m_{2} a\right) R=-\frac{I a}{R} \label{eq:9.54} \]
який легко вирішується для\(a\):
\[ a=\frac{m_{2} g}{m_{1}+m_{2}+I / R^{2}} \label{eq:9.55} .\]
Якщо подивитися на структуру цього рівняння, все це має сенс. Чисельник - це сила тяжіння на блоці 2, яка є, в кінцевому рахунку, силою, відповідальною за приведення всієї справи в рух. Знаменником є, по суті, інерція системи: звичайна інерція для блоків, і обертальна інерція для шківа. Відзначимо далі, що, якщо розглядати шків як плоский однорідний диск маси\(M\)\(I = \frac{1}{2}MR^2\), то, і знаменник (\ ref {eq:9.55}) стає справедливим\(m_1 + m_2 + M/2\).