2.2: Прискорення
- Page ID
- 74705

Середнє і миттєве прискорення
Так само, як ми визначили середню швидкість в попередньому розділі, використовуючи концепцію переміщення (або зміни положення) протягом часового інтервалу\(\Delta t\), ми визначаємо середнє прискорення за час,\(\Delta t\) використовуючи зміну швидкості:
\[ a_{a v}=\frac{\Delta v}{\Delta t}=\frac{v_{f}-v_{i}}{t_{f}-t_{i}} \label{eq:2.1} .\]
Тут\(v_i\) і\(v_f\) знаходяться початкова і кінцева швидкості, відповідно, тобто швидкості на початку і кінці часового інтервалу\(\Delta t\). Як і у випадку з середньою швидкістю, однак, середнє прискорення - це поняття дещо обмеженої корисності, тому ми могли б також негайно перейти до визначення миттєвого прискорення (або просто «прискорення», без модифікаторів), через те ж саме обмеження процес, за допомогою якого ми визначили миттєву швидкість:
\[ a=\lim _{\Delta t \rightarrow 0} \frac{\Delta v}{\Delta t} \label{eq:2.2} .\]
Все, що ми говорили в попередньому розділі про взаємозв'язок між швидкістю і положенням, тепер можна сказати про взаємозв'язок між прискоренням і швидкістю. Наприклад (якщо ви знаєте числення), прискорення як функція часу є похідною швидкості як функції часу, що робить її другою похідною функції позиції:
\[ a=\frac{d v}{d t}=\frac{d^{2} x}{d t^{2}} \label{eq:2.3} \]
(А якщо ви ще не знаєте числення, не турбуйтеся про надписи «2» на цьому останньому виразі! Це просто дивне позначення, яке ви дізнаєтеся коли-небудь.)
Аналогічно, ми можемо «зчитувати» миттєве прискорення з графіка швидкості та часу, дивлячись на нахил прямої дотичної до кривої в будь-якій точці. Однак, якщо те, що нам дано, - це графік позиції проти часу, зв'язок із прискоренням є більш непрямим. Малюнок\(\PageIndex{1}\) надає вам такий приклад. Подивіться, чи можете ви здогадатися, в яких точках уздовж цієї кривої прискорення є позитивним, негативним або нульовим.
Спосіб зробити це «з нуля», як би, полягає в тому, щоб спочатку спробувати з'ясувати, що робить швидкість, і зробити висновок про прискорення. Ось як це піде:
Починаючи з\(t\) = 0, і стежачи за нахилом\(t\) кривої\(x\) -vs-, ми можемо бачити, що швидкість починається з нуля або близько нуля і неухильно зростає протягом деякого часу, поки не буде\(t\) трохи більше 2 с (скажімо,\(t\) = 2,2 с для визначеності). Це відповідало б періоду позитивного прискорення, оскільки\(\Delta v\) було б позитивним для кожного\(\Delta t\) в цьому діапазоні.
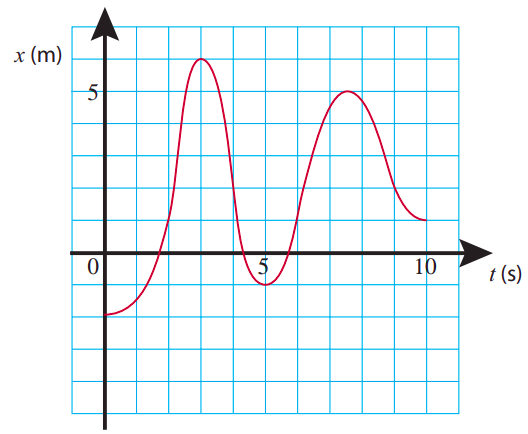
Між\(t\) = 2,2 с і\(t\) = 2,5 с, коли об'єкт рухається від\(x\) = 2 м до\(x\) = 4 м, швидкість, здається, не дуже сильно змінюється, і прискорення відповідно дорівнювало б нулю або близько нуля. Потім, близько\(t\) = 2,5 с, швидкість починає помітно зменшуватися, стаючи (миттєво) нулем при\(t\) = 3 с (\(x\)= 6 м). Що б відповідало негативному прискоренню. Однак зауважте, що швидкість згодом продовжує зменшуватися, стаючи все більш негативною, поки навколо\(t\) = 4 с. це також відповідає негативному прискоренню: навіть якщо об'єкт прискорюється, він прискорюється в негативному напрямку, отже\(\Delta v\), і, отже\(a\), є негативних для кожного часового інтервалу немає. Робимо висновок, що\(a < 0\) за всі часи між\(t\) = 2,5 с і\(t\) = 4 с.
Далі, як ми просто дивимося повз\(t\) = 4 с, відбувається ще щось цікаве: об'єкт все ще йде в негативному напрямку (негативна швидкість), але зараз він сповільнюється. Математично це відповідає додатному прискоренню, оскільки алгебраїчне значення швидкості фактично збільшується (число на кшталт −3 більше числа, подібного до −5). Ще один спосіб подумати про це полягає в тому, що якщо у нас все менше негативних речей, наша загальна тенденція є позитивною. Таким чином, прискорення позитивне аж від\(t\) = 4 с до\(t\) = 5 с (де швидкість миттєво дорівнює нулю, коли напрямок руху об'єкта змінюється), і далі, поки приблизно\(t\) = 6 с, оскільки між\(t\) = 5 с і\(t\) = 6 с швидкість позитивна і зростаючий.
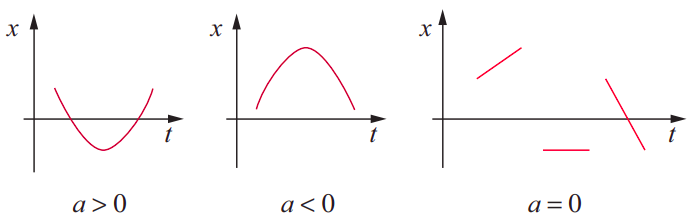
Ви, мабуть, можете самостійно з'ясувати, що відбувається після\(t\) = 6 с, міркуючи, як я це робив вище, але ви, можливо, також помітили закономірність, яка робить такий аналіз набагато простіше. Прискорення (як, можливо, вже зрозуміли ті, хто знав числення), будучи пропорційним другій похідній функції щодо\(t\), безпосередньо пов'язане\(x(t)\) з кривизною\(x\) -vs-\(t\) графа. Як показано на малюнку\(\PageIndex{2}\) нижче, якщо графік увігнутий (іноді його називають «увігнутим вгору»), прискорення є позитивним, тоді як воно негативне, коли графік опуклий (або «увігнутий вниз»). Це (миттєво) нуль в тих точках, де змінюється кривизна (які ви можете знати як точки перегину), а також протягом відрізків часу, коли\(x\) -vs-\(t\) графік є прямою лінією (рух з постійною швидкістю).
\(\PageIndex{3}\)На малюнку показано положення, швидкість і прискорення в порівнянні з часом для гіпотетичного випадку руху. Будь ласка, уважно вивчіть його, поки кожна особливість кожного графіка не має сенсу щодо двох інших! Ви побачите багато інших прикладів цього в домашніх завданнях та лабораторії.
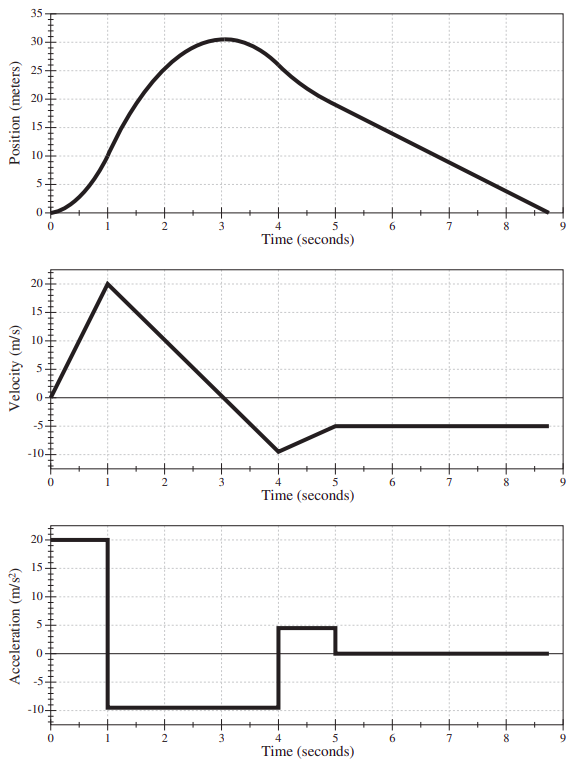
Зверніть увагу, що у всіх цих цифрах знак\(x\) або\(v\) в будь-який момент часу не має нічого спільного зі знаком\(a\) того ж часу. Це правда, що, наприклад, негатив\(a\), якщо витримується протягом досить тривалого часу, в кінцевому підсумку призведе до негативного\(v\) (як це відбувається, наприклад, на малюнку\(\PageIndex{3}\) за інтервал від\(t\)\(t\) = 1 до = 4 с), але це може зайняти багато часу, залежно від розміру \(a\)і початкове значення\(v\). Натомість графічні підказки: прискорення задається нахилом дотичної до кривої\(v\) -vs-, або\(t\) кривизною кривої\(x\) -vs-\(t\), як пояснено на малюнку\(\PageIndex{2}\); а швидкість задається нахилом дотичної до\(x\) - vs-\(t\) крива.
(Примітка: Щоб зробити інтерпретацію малюнка\(\PageIndex{3}\) простішим, я вибрав прискорення, щоб бути «кусково постійним», тобто постійним протягом тривалих часових інтервалів і зміна значення розривно від одного інтервалу до іншого. Це фізично нереально: в будь-якій реальній ситуації прискорення, як очікується, зміниться більш-менш плавно від миттєвого до миттєвого. Ми побачимо приклади цього пізніше, коли почнемо розглядати реалістичні моделі зіткнень.)
Рух з постійним прискоренням
Особливим видом руху, який одночасно є відносно простим і дуже важливим на практиці, є рух з постійним прискоренням (приклади див. Рис.\(\PageIndex{3}\) Знову). Якщо\(a\) постійна, то це означає, що швидкість змінюється з часом з постійною швидкістю, на фіксовану кількість м/с кожну секунду. (Це, до речі, одиниці прискорення: метри в секунду в секунду, або м/с 2.) Зміна швидкості протягом часового інтервалу потім\(\Delta t\) задається
\[ \Delta v = a \Delta t \label{eq:2.4} \]
які також можуть бути написані
\[ v=v_{i}+a\left(t-t_{i}\right) \label{eq:2.5} .\]
Рівняння (\ ref {eq:2.5}) є формою швидкісної функції (\(v\)як функція\(t\)) для руху з постійним прискоренням. Це, в свою чергу, має бути похідною щодо часу відповідної функції положення. Якщо ви знаєте прості похідні, то, ви можете переконатися, що відповідна форма функції положення повинна бути
\[ x=x_{i}+v_{i}\left(t-t_{i}\right)+\frac{1}{2} a\left(t-t_{i}\right)^{2} \label{eq:2.6} \]
або з точки зору інтервалів,
\[ \Delta x=v_{i} \Delta t+\frac{1}{2} a(\Delta t)^{2} \label{eq:2.7} .\]
Найчастіше Equation (\ ref {eq:2.6}) записується з неявним припущенням, що початкове значення t дорівнює нулю:
\[ x=x_{i}+v_{i} t+\frac{1}{2} a t^{2} \label{eq:2.8} .\]
Це простіше, але не таке загальне, як рівняння (\ ref {eq:2.6}). Завжди переконайтеся, що ви знаєте, які умови застосовуються для будь-якого рівняння, яке ви вирішили використовувати!
Як видно з Equation (\ ref {eq:2.5}), для інтервалів, протягом яких прискорення є постійним, крива швидкості проти часу повинна бути прямою лінією. Малюнок\(\PageIndex{3}\) ілюструє це. Рівняння (\ ref {eq:2.6}), з іншого боку, показує, що для тих самих інтервалів крива положення проти часу повинна бути (частиною a) параболою, і знову це можна побачити на малюнку\(\PageIndex{3}\) (іноді, якщо прискорення невелике, кривизну графіка може бути важко побачити; це відбувається на малюнку \(\PageIndex{3}\)для інтервалу між\(t\) = 4 с і\(t\) = 5 с).
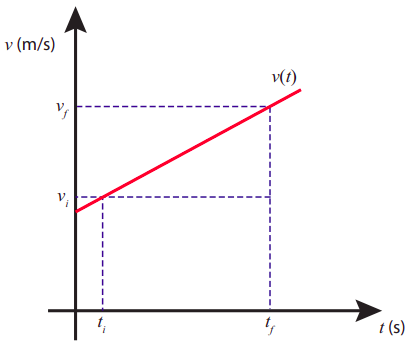
Спостереження, що\(v\) -vs-\(t\) є прямою лінією, коли прискорення є постійним, надає нам простий спосіб отримати рівняння (\ ref {eq:2.7}), при поєднанні з результатом (з кінця попередньої глави), що зміщення протягом часового інтервалу\(\Delta t\) дорівнює площі під \(t\)крива\(v\) -vs- для цього часового інтервалу. Дійсно, розглянемо ситуацію, наведену на малюнку\(\PageIndex{4}\). Загальна площа під показаним відрізком дорівнює площі прямокутника основи\(\Delta t\) і висоти\(v_i\), плюс площа трикутника основи\(\Delta t\) і висоти\(v_f − v_i\). Оскільки\(v_f − v_i = a\Delta t\) проста геометрія одразу дає рівняння (\ ref {eq:2.7}) або його еквівалент (\ ref {eq:2.6}).
Нарешті, розглянемо, що станеться, якщо ми вирішимо рівняння (\ ref {eq:2.4})\(\Delta t\) і підставимо результат на (\ ref {eq:2.7}). Ми отримуємо
\[ \Delta x=\frac{v_{i} \Delta v}{a}+\frac{(\Delta v)^{2}}{2 a} \label{eq:2.9} .\]
Відпускаючи\(\Delta v = v_f − v_i\), трохи алгебри дає
\[ v_{f}^{2}-v_{i}^{2}=2 a \Delta x \label{eq:2.10} .\]
Це зручний невеликий результат, який також можна побачити, більш безпосередньо, з теорем про роботу та енергію, які будуть введені в главі 7 1.
1 Насправді рівняння (\ ref {eq:2.10}) виявляється настільки зручним, що ви, ймовірно, знайдете себе використовувати його знову і протягом цього семестру, і ви навіть можете спокуситися використовувати його для проблем, пов'язаних з рухом у двох вимірах. Однак, якщо ви дійсно не знаєте, що робите, вам слід протистояти спокусі, оскільки дуже легко використовувати Equation (\ ref {eq:2.10}) неправильно, коли прискорення і переміщення не лежать уздовж однієї лінії. Натомість слід використовувати відповідну форму теореми «робота-енергія».
Прискорення як вектор
У двох (або більше) вимірах вводимо середній вектор прискорення
\[ \vec{a}_{a v}=\frac{\Delta \vec{v}}{\Delta t}=\frac{1}{\Delta t}\left(\vec{v}_{f}-\vec{v}_{i}\right) \label{eq:2.11} \]
складовими якого є і\(a_{av,x} = \Delta v_x/ \Delta t\) т. д. Миттєве прискорення - це вектор, заданий межею Рівняння (\ ref {eq:2.11}) як\(\Delta t \rightarrow 0\), і його складові\(a_x = dvx_/dt, a_y = dv_y/dt\), отже,.
Зауважте, що, оскільки\(\vec v_i\) і\(\vec v_f\) в Equation (\ ref {eq:2.11}) є векторами, і їх потрібно віднімати як такий, вектор прискорення буде ненульовим, коли\(\vec v_i\) і\(\vec v_f\) буде відрізнятися, навіть якщо, наприклад, їх величини (які дорівнюють швидкості об'єкта) однакові. Іншими словами, ви прискорили рух щоразу, коли напрямок руху змінюється, навіть якщо швидкість цього не відбувається.
Поки ми працюємо в одному вимірі, я буду дотримуватися тієї ж конвенції про прискорення, що і той, який я ввів для швидкості в главі 1: а саме, я буду використовувати символ\(a\) без індексу, щоб посилатися на відповідний компонент прискорення (\(a_x, a_y,...\)), і не до величини вектора\(\vec a\).
Прискорення в різних опорних кадрах
У главі 1 ви побачили, що між швидкостями частинки P, виміряної у двох різних системах відліку, A та B:
\[ \vec{v}_{A P}=\vec{v}_{A B}+\vec{v}_{B P} \label{eq:2.12} .\]
А як щодо прискорення? Рівняння типу (\ ref {eq:2.12}) буде триматися для початкової і кінцевої швидкостей, і віднімаючи їх ми отримаємо
\[ \Delta \vec{v}_{A P}=\Delta \vec{v}_{A B}+\Delta \vec{v}_{B P} \label{eq:2.13} .\]
Тепер припустимо, що опорний кадр B рухається з постійною швидкістю щодо кадру А. У такому випадку\(\vec v_{AB,f} = \vec v_{AB,i}\), так\(\Delta \vec v_{AB} \) = 0, а потім, діливши Рівняння (\ ref {eq:2.13}) на\(\Delta t\), і взявши межу\(\Delta t \rightarrow 0\), отримаємо
\[ \left.\vec{a}_{A P}=\vec{a}_{B P} \quad \text { (for constant } \vec{v}_{A B}\right) \label{eq:2.14} .\]
Отже, якщо два опорні кадри рухаються з постійною швидкістю відносно один одного, спостерігачі в обох кадрах вимірюють однакове прискорення для будь-якого об'єкта, який вони обидва можуть відстежувати.
Результат Equation (\ ref {eq:2.14}) означає, зокрема, що якщо у нас є інерційний кадр, то будь-який кадр, що рухається з постійною швидкістю відносно нього, теж буде інерційним, оскільки відповідні вимірювання спостерігачів погодяться, що швидкість об'єкта не змінюється (інакше кажучи, його прискорення дорівнює нулю) коли на нього не діють ніякі сили. І навпаки, прискорений кадр не буде інерційним кадром, тому що Equation (\ ref {eq:2.14}) не буде триматися. Це узгоджується з прикладами, про які я згадував у розділі 2.1 (стрибаюча площина, машина, що йде на зупинку). Іншим прикладом неінерційної рами буде автомобіль, який об'їжджає криву, навіть якщо він їде з постійною швидкістю, оскільки, як я щойно зазначив вище, це також прискорена система. Це підтверджується тим фактом, що об'єкти в такому автомобілі мають тенденцію рухатися - відносно автомобіля - до зовнішньої частини кривої, хоча на них не діє жодна фактична сила.