25.2: Планетарні орбіти
- Page ID
- 75358

Зараз ми починаємо дослідження проблеми Кеплера. Визначимо рівняння руху для рухів двох тіл, що взаємодіють через гравітаційну силу (задача двох тіл), використовуючи як силові методи, так і закони збереження.
Зменшення проблеми двох тіл в проблему одного тіла
Почнемо з того, що покажемо, як рух двох тіл, що взаємодіють за допомогою гравітаційної сили (проблема двох тіл), математично еквівалентний руху одного тіла, на яке діє зовнішня центральна гравітаційна сила, де маса єдиного тіла - це зменшена маса\(\mu\),
\[\frac{1}{\mu}=\frac{1}{m_{1}}+\frac{1}{m_{2}} \Rightarrow \mu=\frac{m_{1} m_{2}}{m_{1}+m_{2}} \nonumber \]
Після того, як ми вирішимо рух зменшеного тіла в цій еквівалентній проблемі одного тіла, ми можемо повернутися до реальної проблеми двох тіл і вирішити для фактичного руху двох вихідних тіл. Зменшена маса була введена в главі 13 Додаток А цих приміток. Цей додаток використовував подібні, але дещо відмінні від позначення, що використовуються в цьому розділі.
Розглянемо гравітаційну взаємодію двох тіл з масами m і як 1 м2 показано на малюнку 25.1.

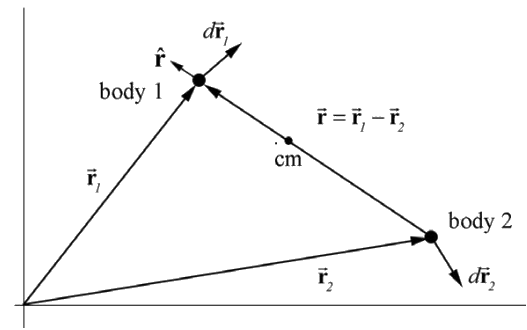
Виберіть систему координат з вибором походження, таку, щоб тіло 1 мало положення,\(\overrightarrow{\mathbf{r}}_{1}\) а тіло 2 - положення\(\overrightarrow{\mathbf{r}}_{2}\) (рис. 25.2). Вектор відносного положення, що\(\overrightarrow{\mathbf{r}}\) вказує від тіла 2 до тіла 1,\(\overrightarrow{\mathbf{r}}=\overrightarrow{\mathbf{r}}_{1}-\overrightarrow{\mathbf{r}}_{2}\) Ми позначаємо величину\(\overrightarrow{\mathbf{r}} \text { by }|\overrightarrow{\mathbf{r}}|=r\), де r - відстань між тілами, і\(\hat{\mathbf{r}}\) є одиничним вектором, що вказує від тіла 2 до тіла 1, так що\(\overrightarrow{\mathbf{r}}=r \hat{\mathbf{r}}\).
Сила на тілі 1 (завдяки взаємодії двох тіл) може бути описана універсальним законом гравітації Ньютона
\[\overrightarrow{\mathbf{F}}_{2,1}=-F_{2,1} \hat{\mathbf{r}}=-G \frac{m_{1} m_{2}}{r^{2}} \hat{\mathbf{r}} \nonumber \]
Нагадаємо, що Третій закон Ньютона вимагає, щоб сила на тіло 2 була рівною за величиною і протилежною в напрямку силі на тілі 1,
\[\overrightarrow{\mathbf{F}}_{1,2}=-\overrightarrow{\mathbf{F}}_{2,1} \nonumber \]
Другий закон Ньютона може застосовуватися індивідуально до двох органів:
\ [\ почати {масив} {l}
\ переправа стрілка {\ mathbf {F}} _ {2,1} =m_ {1}\ frac {d^ {2}\ переправа стрілка {\ mathbf {r}} _ {1}} {d t^ {2}}\\
\ переправа стрілка {\ mathbf {F}} _ {1,2}} =m_ {2}\ frac {d^ {2}\ переправа стрілка {\ mathbf {r}} _ {2}} {d t^ {2}}
\ кінець {масив}\ nonumber\]
Ділення через масу в кожному з рівнянь (25.2.4) і (25.2.5) дає
\[\frac{\overrightarrow{\mathbf{F}}_{2,1}}{m_{1}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{1}}{d t^{2}} \nonumber \]
\[\frac{\overrightarrow{\mathbf{F}}_{1,2}}{m_{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{2}}{d t^{2}} \nonumber \]
Віднімання виразу в рівнянні (25.2.7) з рівняння (25.2.6) дає
\[\frac{\overrightarrow{\mathbf{F}}_{2,1}}{m_{1}}-\frac{\overrightarrow{\mathbf{F}}_{1,2}}{m_{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{1}}{d t^{2}}-\frac{d^{2} \overrightarrow{\mathbf{r}}_{2}}{d t^{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}}{d t^{2}} \nonumber \]
Використовуючи Третій закон Ньютона, рівняння (25.2.3), Рівняння (25.2.8) стає
\[\overrightarrow{\mathbf{F}}_{2,1}\left(\frac{1}{m_{1}}+\frac{1}{m_{2}}\right)=\frac{d^{2} \overrightarrow{\mathbf{r}}}{d t^{2}} \nonumber \]
Використовуючи зменшену масу μ, як визначено в Рівнянні (25.2.1), Рівняння (25.2.9) стає
\ [\ почати {масив} {l}
\ frac {\ переправа стрілка {\ mathbf {F}} _ {2,1}} {\ mu} =\ frac {d^ {2}\ переправа стрілка {\ mathbf {r}}} {d t^ {2}}
\\ переправа {\ mathbf {F}} _ {2,1} =\ му\ frac {d^ {2}\ переправа стрілка {\ mathbf {r}}} {d t^ {2}}
\ кінець {масив}\ nonumber\]
де\(\overrightarrow{\mathbf{F}}_{2,1}\) задається рівнянням (25.2.2).
Наш результат має спеціальне тлумачення з використанням Другого закону Ньютона. \(\mu\)Дозволяти масою одного тіла з\(\overrightarrow{\mathbf{r}}=r \hat{\mathbf{r}}\) вектором положення відносно походження O, де\(\hat{\mathbf{r}}\) є одиничний вектор, що вказує від початку O до єдиного тіла. Тоді рівняння руху, Рівняння (25.2.10), має на увазі, що єдине тіло маси\(\mu\) знаходиться під впливом привабливої гравітаційної сили, що вказує на початок. Отже, початкова гравітаційна задача двох тіл тепер зведена до еквівалентної проблеми одного тіла, яка включає в себе єдине тіло з масою\(\mu\) під впливом центральної сили\(\overrightarrow{\mathbf{F}}^{G}=-\mathrm{F}_{2,1} \hat{\mathbf{r}}\) Зверніть увагу, що в цій переформулюванні немає тіла, розташованого в центральній точці (походження О). Параметр r у задачі двох тіл - це відносна відстань між початковими двома тілами, тоді як той самий параметр r в задачі одного тіла - це відстань між єдиним тілом і центральною точкою. Це скорочення узагальнює всі центральні сили.