13.12: Додаток 13А Робота над системою двох частинок
- Page ID
- 75918

Покажемо, що робота, виконана внутрішньою силою при зміні системи з двох частинок мас\(m_{1}\) і\(m_{1}\) відповідно від початкового стану А до кінцевого стану В дорівнює
\[W_{\mathrm{c}}=\frac{1}{2} \mu\left(v_{B}^{2}-v_{A}^{2}\right) \nonumber \]
де\(v_{B}^{2}\) - квадрат відносної швидкості в стані B,\(v_{A}^{2}\) - квадрат відносної швидкості в стані А, і\(\mu=m_{1} m_{2} /\left(m_{1}+m_{2}\right)\).
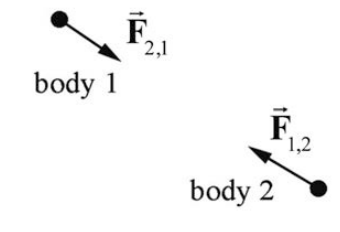
Розглянемо два тіла 1 і 2 і пару сил взаємодії, показану на малюнку 13A.1.
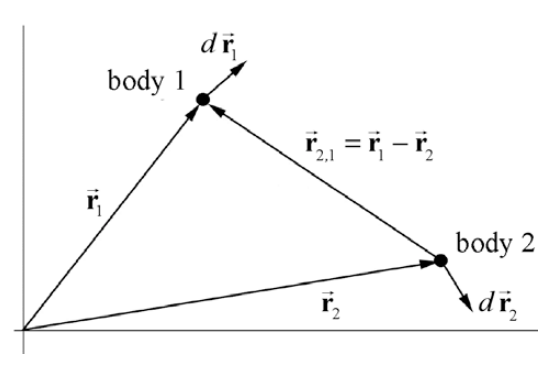
Вибираємо систему координат, показану на малюнку 13А.2.
Другий закон Ньютона, застосований до тіла 1, є
\[\overrightarrow{\mathbf{F}}_{2,1}=m_{1} \frac{d^{2} \overrightarrow{\mathbf{r}}_{1}}{d t^{2}} \nonumber \]
і застосовується до тіла 2
\[\overrightarrow{\mathbf{F}}_{1,2}=m_{2} \frac{d^{2} \overrightarrow{\mathbf{r}}_{2}}{d t^{2}} \nonumber \]
Розділіть кожну сторону рівняння (13.1.2) на\(m_{1}\),
\[\frac{\overrightarrow{\mathbf{F}}_{2,1}}{m_{1}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{1}}{d t^{2}} \nonumber \]
і розділити кожну сторону рівняння (13.1.3) на\(m_{2}\),
\[\frac{\overrightarrow{\mathbf{F}}_{1,2}}{m_{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{2}}{d t^{2}} \nonumber \]
Відніміть рівняння (13.1.5) з рівняння (13.1.4), що дає
\[\frac{\overrightarrow{\mathbf{F}}_{2,1}}{m_{1}}-\frac{\overrightarrow{\mathbf{F}}_{1,2}}{m_{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{1}}{d t^{2}}-\frac{d^{2} \overrightarrow{\mathbf{r}}_{2}}{d t^{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{2,1}}{d t^{2}} \nonumber \]
де\(\overrightarrow{\mathbf{r}}_{2,1}=\overrightarrow{\mathbf{r}}_{1}-\overrightarrow{\mathbf{r}}_{2}\). Використовуйте Третій закон Ньютона\(\overrightarrow{\mathbf{F}}_{2,1}=-\overrightarrow{\mathbf{F}}_{1,2}\) на лівій стороні рівняння (13.1.6), щоб отримати
\[\overrightarrow{\mathbf{F}}_{2,1}\left(\frac{1}{m_{1}}+\frac{1}{m_{2}}\right)=\frac{d^{2} \overrightarrow{\mathbf{r}}_{1}}{d t^{2}}-\frac{d^{2} \overrightarrow{\mathbf{r}}_{2}}{d t^{2}}=\frac{d^{2} \overrightarrow{\mathbf{r}}_{2,1}}{d t^{2}} \nonumber \]
\(d^{2} \overrightarrow{\mathbf{r}}_{1,2} / d t^{2}\)Величина - відносне прискорення тіла 1 по відношенню до тіла 2.
Визначте
\[\frac{1}{\mu} \equiv \frac{1}{m_{1}}+\frac{1}{m_{2}} \nonumber \]
Кількість\(\mu\) відома як зменшена маса системи. Рівняння (13.1.7) тепер набуває вигляду
\[\overrightarrow{\mathbf{F}}_{2,1}=\mu \frac{d^{2} \overrightarrow{\mathbf{r}}_{2,1}}{d t^{2}} \nonumber \]
Робота, виконана в системі з витіснення двох мас з початкового стану А в кінцевий стан В, дається
\[W=\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot d \overrightarrow{\mathbf{r}}_{1}+\int_{A}^{B} \overrightarrow{\mathbf{F}}_{1,2} \cdot d \overrightarrow{\mathbf{r}}_{2} \nonumber \]
Нагадаємо, по теоремі робочої енергії, що LHS - це робота, виконана над системою,
\[W=\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot d \overrightarrow{\mathbf{r}}_{1}+\int_{A}^{B} \overrightarrow{\mathbf{F}}_{1,2} \cdot d \overrightarrow{\mathbf{r}}_{2}=\Delta K \nonumber \]
З третього закону Ньютона сума в рівнянні (13.1.10) стає
\[W=\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot d \overrightarrow{\mathbf{r}}_{1}-\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot d \overrightarrow{\mathbf{r}}_{2}=\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot\left(d \overrightarrow{\mathbf{r}}_{1}-d \overrightarrow{\mathbf{r}}_{2}\right)=\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot d \overrightarrow{\mathbf{r}}_{2,1} \nonumber \]
де\(d \overrightarrow{\mathbf{r}}_{2,1}\) - відносне зміщення двох тіл. Тепер ми можемо замінити другий закон Ньютона, рівняння (13.1.9), для відносного прискорення в рівняння (13.1.12),
\[W=\int_{A}^{B} \overrightarrow{\mathbf{F}}_{2,1} \cdot d \overrightarrow{\mathbf{r}}_{2,1}=\int_{A}^{B} \mu \frac{d^{2} \overrightarrow{\mathbf{r}}_{2,1}}{d t^{2}} \cdot d \overrightarrow{\mathbf{r}}_{2,1}=\mu \int_{A}^{B}\left(\frac{d^{2} \overrightarrow{\mathbf{r}}_{2,1}}{d t^{2}} \cdot \frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t}\right) d t \nonumber \]
де ми використовували співвідношення між диференціальними елементами\(d{\mathbf{r}}_{2,1}=\frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t} d t\). Правило добутку для похідних скалярного добутку вектора з самим собою дано для цього випадку
\[\frac{1}{2} \frac{d}{d t}\left(\frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t} \cdot \frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t}\right)=\frac{d^{2} \overrightarrow{\mathbf{r}}_{2,1}}{d t^{2}} \cdot \frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t} \nonumber \]
Замініть рівняння (13.1.14) на рівняння (13.1.13), яке потім стає
\[W=\mu \int_{A}^{B} \frac{1}{2} \frac{d}{d t}\left(\frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t} \cdot \frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t}\right) d t \nonumber \]
Рівняння (13.1.15) тепер є інтегралом точної похідної, що дає
\[W=\left.\frac{1}{2} \mu\left(\frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t} \cdot \frac{d \overrightarrow{\mathbf{r}}_{2,1}}{d t}\right)\right|_{A} ^{B}=\left.\frac{1}{2} \mu\left(\overrightarrow{\mathbf{v}}_{2,1} \cdot \overrightarrow{\mathbf{v}}_{2,1}\right)\right|_{A} ^{B}=\frac{1}{2} \mu\left(v_{B}^{2}-v_{A}^{2}\right) \nonumber \]
де\(\overrightarrow{\mathbf{V}}_{2,1}\) - відносна швидкість між двома тілами. Важливо зазначити, що у вищезгаданій деривації, якби ми обмінялися ролями тіла 1 і 2, тобто\(1 \rightarrow 2 \text { and } 2 \rightarrow 1\) ми отримали б однаковий результат, тому що
\ [\ почати {вирівняний}
\ стрілка над праворуч {\ mathbf {F}} _ {1,2} &=-\ переправа {\ mathbf {F}} _ {2,1}\
\\ переправа стрілка {\ mathbf {r}} _ {1,2} &=\ переправа {\ mathbf {r}} _ {2} -\ переправа стрілка {\ mathbf {r}} _ {1} =-\ переправа стрілка {\ mathbf {r}} _ {2,1}\
d\ стрілка переходу {\ mathbf {r}} _ { 1,2} &= d\ ліворуч (\ переправа стрілка {\ mathbf {r}} _ {2} -\ переправа стрілка {\ mathbf {r}} _ {1}\ праворуч) =-d\ переправа стрілка {\ mathbf {r}}\\
\ переправа стрілка {\ mathbf {v}} _ {1,2} &=-\ переправа стрілка {\ mathbf {v}} _ {2,1}
\ кінець {вирівняний}\ nonumber\]
Рівняння (13.1.16) має на увазі, що виконана робота - це зміна кінетичної енергії системи, яку ми можемо записати через зменшену масу і зміну квадрата відносної швидкості двох об'єктів
\[\Delta K=\frac{1}{2} \mu\left(v_{B}^{2}-v_{A}^{2}\right) \nonumber \]