18.3: Синхронізація
- Page ID
- 67391
Цікавим застосуванням спектрального розриву/алгебраїчної зв'язності є визначення синхронізації лінійно зв'язаних динамічних вузлів, яку можна сформулювати наступним чином:
\[\frac{dx_{i}}{dt} =R(x_{i}) +\alpha{\sum_{j\epsilon{N_{i}}}(H(x_j) -H(x_i)}) \label{(18.6)} \]
\(x_i\)Ось стан вузла\(i\),\(R\) це термін локальної реакції, який виробляє властиву динамічну поведінку окремих вузлів, і\(N_i\) є сусідством вузла\(i\). Ми припускаємо, що\(R\) ідентична для всіх вузлів, і вона виробляє певну траєкторію,\(x_s(t)\) якщо немає взаємодії з іншими вузлами. А саме,\(x_s(t)\) дається як розв'язок диференціального рівняння\(dx/dt = R(x)\). \(H\)називається вихідною функцією, яка однорідно застосовується до всіх вузлів. Вихідна функція використовується для узагальнення взаємодії та дифузії між вузлами; замість того, щоб припускати, що самі стани вузлів безпосередньо видно іншим, ми припускаємо, що певний аспект станів вузлів (представлений\(H(x)\)) є видимим і дифузійним для інших вузлів.
Рівняння\ ref {(18.6)} можна додатково спростити за допомогою матриці Лапласа, наступним чином:
\[\frac{dx_i}{dt} =R(x_i) -\alpha{L} \begin{pmatrix} H(x_1) \\ H(x_2) \\ \vdots \\ H(x_n)\end{pmatrix} \label{(18.7)} \]
Тепер ми хочемо вивчити, чи може ця мережа зв'язаних динамічних вузлів синхронізуватися чи ні. Синхронізація можлива тоді і тільки в тому випадку, якщо траєкторія\(x_i(t) = x_s(t)\) для всіх\(i\) стабільна. Це нове поняття, тобто вивчити стійкість динамічної траєкторії, а не стану статичної рівноваги. Але ми все ще можемо прийняти ту саму базову процедуру аналізу лінійної стійкості: представляти стан системи як суму цільового стану та невеликого збурень, а потім перевірити, чи зростає чи зменшується збурень з часом. Тут ми представляємо стан кожного вузла наступним чином:
\[x_i(t) =x_s(t) +\Delta{x_i(t)} \label{(18.8)} \]
Підключивши цей новий вираз до Equation\ ref {(18.7)}, отримаємо
\[\frac{d(x_s+\Delta{x_i})}{dt} =R(x_s+\Delta{x_i})- \alpha{L} \begin{pmatrix} H(x_s+\Delta{x_1}) \\ H(x_s+\Delta{x_2}) \\ \vdots \\ H(x_s +\Delta{x_n})\end{pmatrix} \label{(18.9)} \]
Оскільки\(∆x_i\) вони дуже малі, ми можемо лінійно\(R\) наблизитись і\(H\) наступним чином:
\[\frac{dx_s}{dt} +\frac{d\Delta{x_i}}{dt} =R(x_s) +R'(x_s)\Delta{x_i}-\alpha{L} \begin{pmatrix} H(x_s)+H'(x_s)\Delta{x_1} \\ H(x_s)+H'(x_s)\Delta{x_2} \\ \vdots \\ H(x_s)+ H'(x_s)\Delta{x_n}\end{pmatrix} \label{(18.10)} \]
Перші терміни з обох сторін скасовують один одного, оскільки xs - це рішення\(dx/dt = R(x)\) за визначенням. Але як щодо тих дратівливих\(H(x_s)\), включених до вектора в останньому семестрі? Чи є спосіб їх усунення? Ну, відповідь полягає в тому, що нам нічого не потрібно робити, тому що матриця Лапласіана з'їсть їх усіх. Пам'ятайте, що матриця Лапласа завжди задовольняє\(Lh = 0\). У цьому випадку вони\(H(x_s)\) складають однорідний вектор в\(H(x_s)h\) цілому. Тому\( L(H(x_s)h) = H(x_s)Lh\) зникає відразу, і отримуємо
\[\frac{d\Delta{x}}{dt} =R'(x_s)\Delta{x_i}-\alpha{H'}(x_s)L \begin{pmatrix} \Delta{x_1} \\ \Delta{x_2} \\ \vdots \\ \Delta{x_{n}} \end{pmatrix}, \label{(18.11)} \]
або, збираючи всі\(∆x_i\) в новий вектор збурень\(∆x\),
\[\frac{d\Delta{x}}{dt} =(R'(x_s)I -\alpha{H'}(x_s)L)\Delta{x}, \label{(18.12)} \]
як кінцевий результат лінеаризації. Зверніть увагу, що\(x_s\) все ще змінюється з часом, тому для того, щоб ця траєкторія була стабільною, всі власні значення цієї досить складної матриці\((R'(x_s)I −αH'(x_s)L)\) коефіцієнтів завжди повинні вказувати на стійкість в будь-який момент часу.
Ми можемо піти ще далі. Відомо, що власні значення матриці\(aX+bI\) є\(aλ_i+b\), де\(λ_i\) є власні значення\(X\). Отже, власні значення\((R'(x_s)I −αH'(x_s)L\) є
\[-\alpha{\lambda_{i}}H'(x_s) +R'(x_s), \label{(18.13)} \]
де\(λ_i\) знаходяться\(L\) чергові значення. Власне значення, яке відповідає найменшому власному значенню\(L\), 0, є справедливим\(R'(x_s)\), що визначається виключно властивою динамікою\(R(x)\) (і, таким чином, природа\(x_s(t))\), так що ми нічого не можемо зробити з цим. Але всі інші\(n − 1\) власні значення повинні бути від'ємними весь час, щоб цільова траєкторія\(x_s(t)\) була стабільною. Отже, якщо уявити друге найменше власне значення (спектральний проміжок для підключених мереж) і найбільше власне значення\(L\) по\(λ_{2}\) і\(λ_n\), відповідно, то критерії стійкості можна записати як
\[\alpha{\lambda_{i}}H'(x_{s}(t)) >R' (x_{s}(t)) \qquad{\text{for all t, and}} \label{(18.14)} \]
\[\alpha{\lambda_n}H'(x_s(t)) >R'(x_s(t)) \qquad{\text{ for all t, }} \label{(18.15)} \]
тому що всі інші проміжні власні значення «затиснуті»\(λ_2\) і\(λ_n\). Ці нерівності дають нам приємну інтуїтивну інтерпретацію умови стійкості: вплив дифузії виходів вузлів (ліва сторона) повинен бути сильнішим, ніж внутрішній динамічний привід (права сторона) весь час.
Зверніть увагу, що, хоча\(α\) і\(λ_i\) є ненегативними,\(H'(xs(t))\) можуть бути як позитивними, так і негативними, тому яка нерівність важливіша, залежить від характеру вихідної функції\(H\) та траєкторії\(x_s(t)\) (яка визначається терміном реакції\(R\)). Якщо\(H'(x_s(t))\) завжди залишається ненегативним, то перша нерівність є достатньою (оскільки друга нерівність природно слідує як\(λ_2 ≤ λ_n\)), і, таким чином, спектральний розрив є єдиною релевантною інформацією для визначення синхронізації мережі. Але якщо ні, то потрібно розглянути і спектральний проміжок, і найбільше власне значення матриці Лапласа.
Ось простий приклад. Припустимо, що купа вузлів коливається в експоненціально прискорюється темпі:
\[\frac{d\theta_i}{dt} =\beta{\theta_i} +\alpha \sum_{j \epsilon{N_i} (\theta_{j} - \theta_{i})} \label{(18.16)} \]
Ось фаза вузла\(i\),\(θ_i\) і\(β\) це швидкість експоненціального прискорення, яка однорідно застосовується до всіх вузлів. Також припустимо, що фактичні значення θ і дифузні до сусідніх вузлів і від них через ребра. Тому\(R(θ) = βθ\) і\(H(θ) = θ\) в цій моделі.
Ми можемо проаналізувати синхронізацію цієї моделі наступним чином. Так як\(H'(θ) = 1 > 0\), ми відразу знаємо, що нерівність\ ref {(18.14)} є єдиною вимогою в даному випадку. Крім того\(R'(θ) = β\), так умова синхронізації задається
\[\alpha{\lambda_2} > \beta, \text{or} \lambda_2 > \frac{\beta}{\alpha}. \label{(18.17)} \]
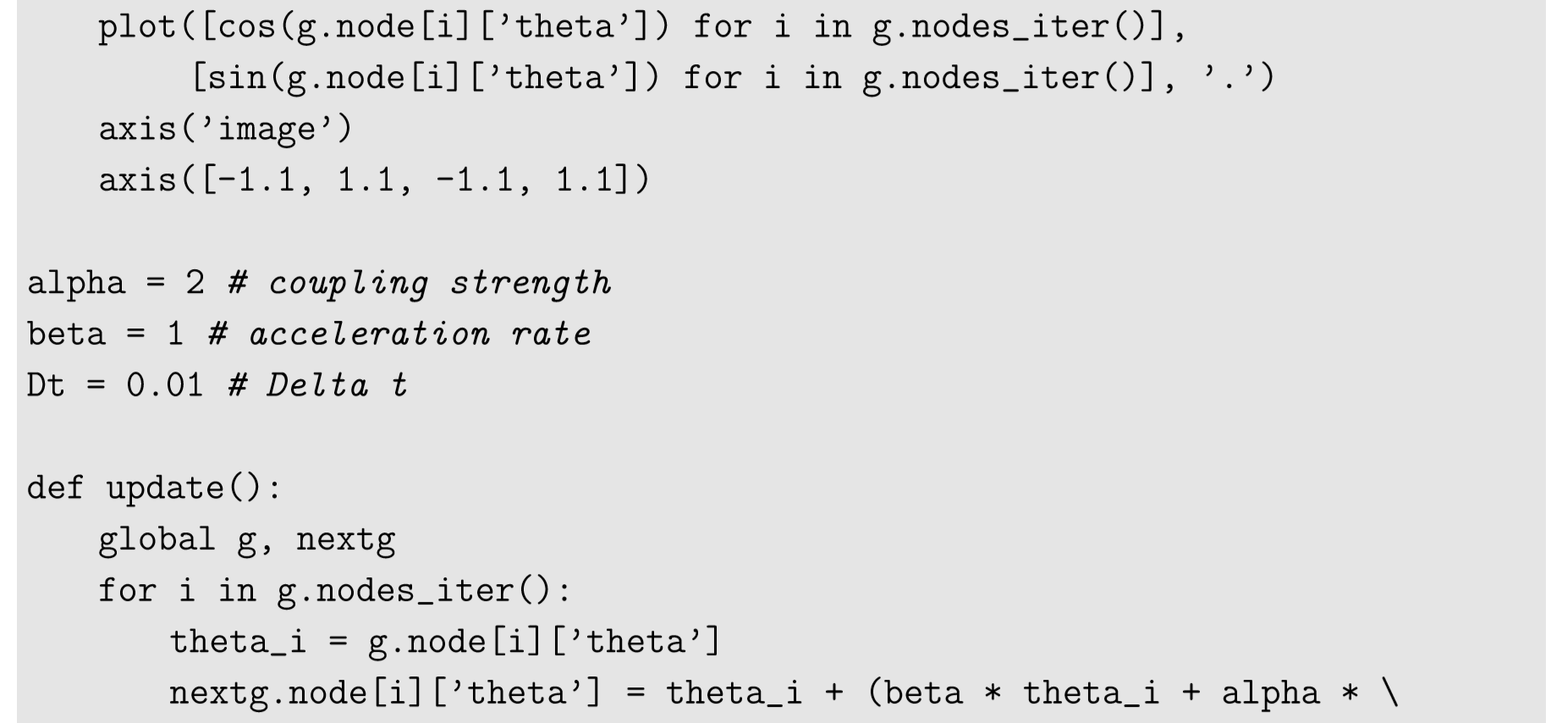
Дуже легко. Давайте перевіримо цей аналітичний результат за допомогою числового моделювання на графіку Карате Клубу. Ми знаємо, що його спектральний проміжок дорівнює 0,4685, тому якщо\(β/α\) це значення нижче (або вище), синхронізація повинна (або не повинна) відбуватися. Ось код для таких симуляцій:
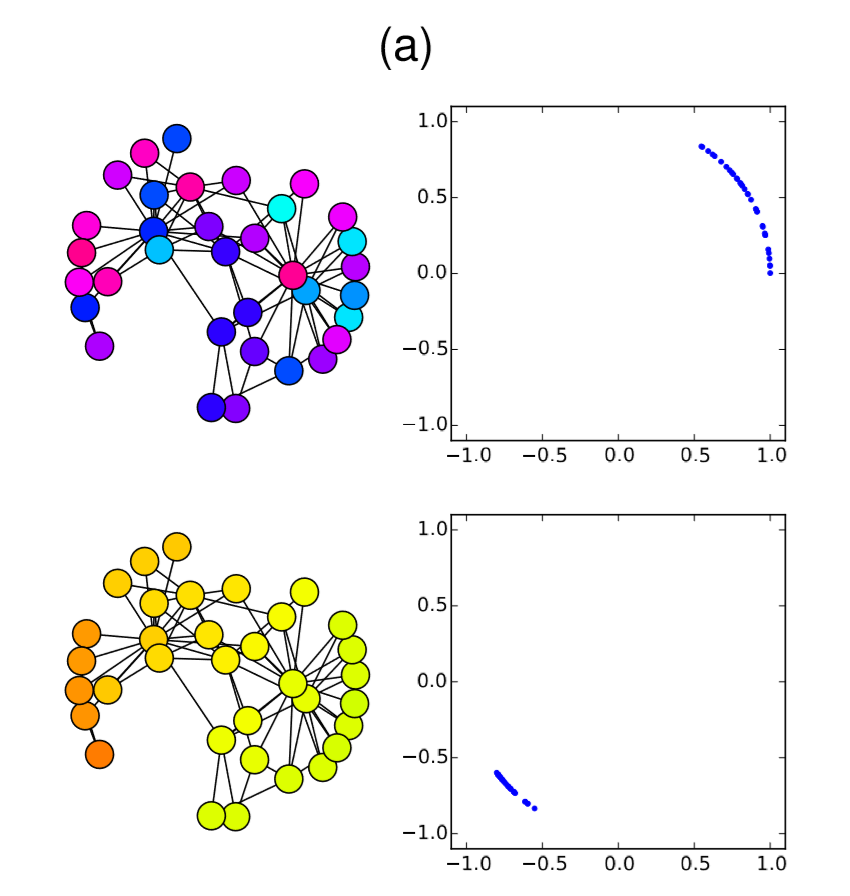
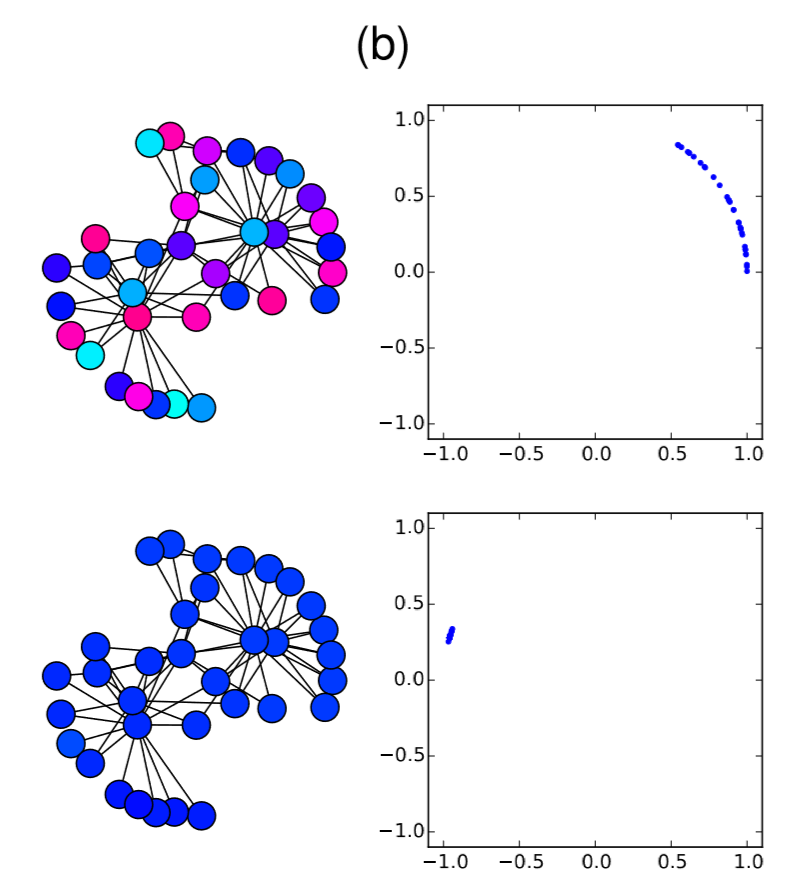
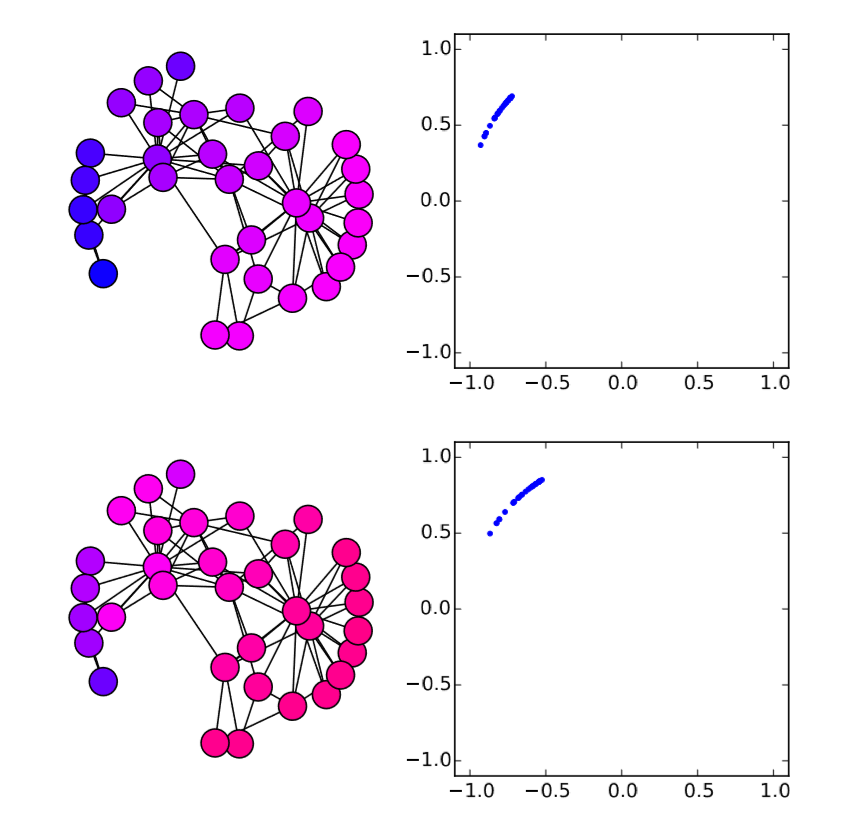
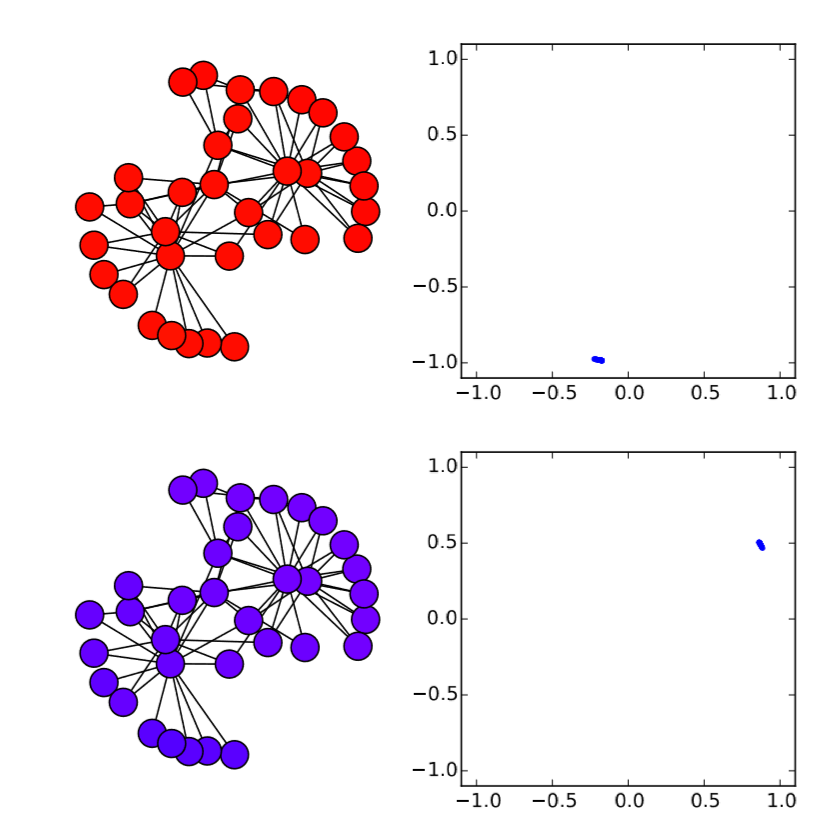
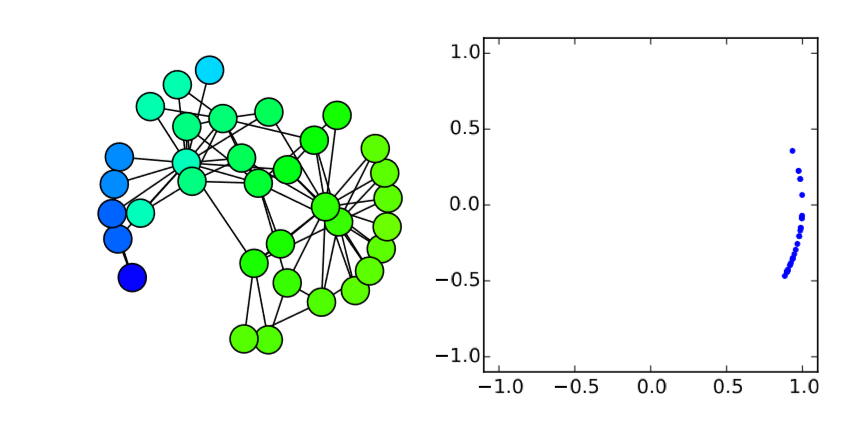
Тут я додав другий сюжет, який показує розподіл фаз у\((x,y) = (cos{θ},sin{θ})\) просторі, лише для візуального розуміння.
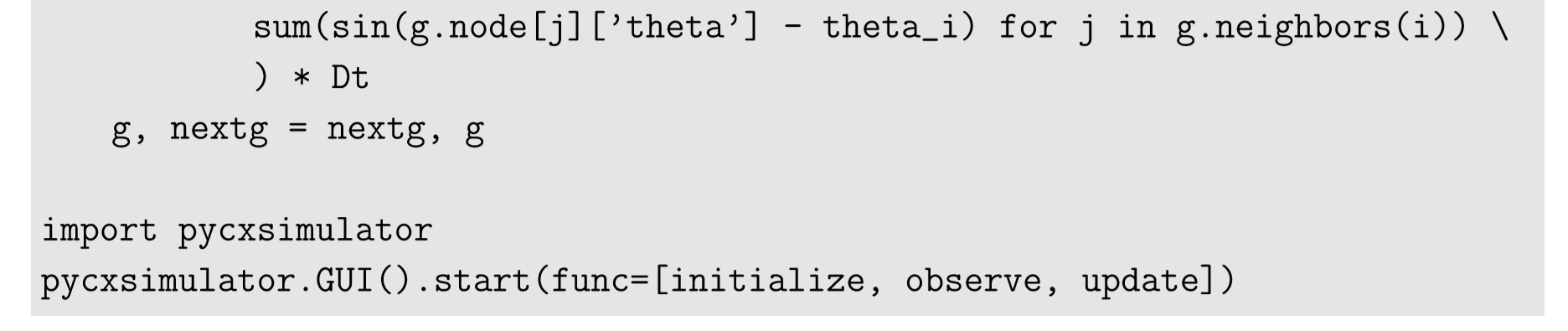
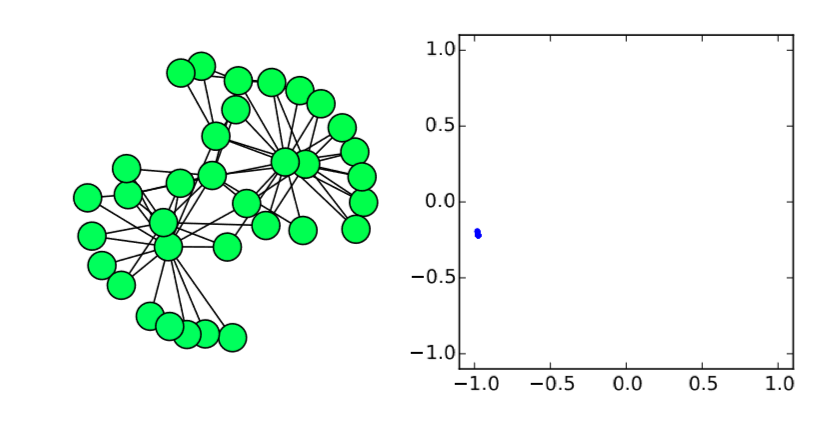
У наведеному вище коді значення параметрів встановлюються на alpha = 2 і beta = 1, так\(λ_2 0.4685 < β/α = 0.5\). Тому передбачається, що вузли не синхронізуються. І, дійсно, результат моделювання підтверджує це прогнозування (рис. 18.3.1 (а)), де вузли спочатку наближалися один до одного за фазами, але, оскільки їх швидкість коливань ставала все швидше і швидше, вони зрештою знову розійшлися, і мережа не змогла досягти синхронізації. Однак, якщо бета трохи знижується до 0,9 так\(λ_2 = 0.4685 > β/α = 0.45\), що синхронізований стан стає стабільним, що підтверджується знову в числовому моделюванні (рис.18.3.1 (b)). Цікаво, що така незначна зміна значення параметра може викликати серйозну різницю в глобальній динаміці мережі. Крім того, досить дивно, що аналіз лінійної стійкості може передбачити цей зсув так точно. Математичний аналіз гірських порід!
Рандомізуйте топологію графа Карате Клубу та виміряйте його спектральний проміжок. Аналітично визначити синхронізацію моделі прискорювальних осциляторів, розглянутих вище\(α = 2\),\(β = 1\) на рандомізованій мережі. Потім підтвердіть свій прогноз за допомогою числового моделювання. Ви також можете спробувати кілька інших топологій мережі.
Далі наведено модель зв'язаних гармонічних осциляторів, де складні вузлові стани використовуються для представлення гармонійних коливань в однозмінному диференціальному рівнянні:
\[ \frac{dx_i}{dt} =i\omega{x_i} +\alpha \sum{j\epsilon{N_i}(x^{\gamma}_{j} -x^{y}_{i})} \label{(18.18)} \]
Тут i використовується для позначення уявної одиниці, щоб уникнути плутанини з індексом вершини i. Оскільки стани складні, вам потрібно буде використовувати\(Re(·)\) по обидва боки нерівностей\ ref {(18.14)} і\ ref {(18.15)} для визначення стійкості.
Проаналізуйте синхронізуваність цієї моделі на графі Карате Клубу та отримайте умову синхронізації щодо вихідного показника\(γ\). Потім підтвердіть свій прогноз за допомогою числового моделювання.
Можливо, ви помітили, що аналіз синхронізації, розглянутий вище, дещо схожий на аналіз стійкості моделей безперервного поля, розглянутих у розділі 14. Дійсно, вони по суті є однією і тією ж аналітичною технікою (хоча ми тоді не розглядали аналіз стійкості динамічних траєкторій). Єдина відмінність полягає в тому, чи представлений простір у вигляді безперервного поля або у вигляді дискретної мережі. Для перших, дифузія
представлений лапласіанським оператором\(∇^2\), тоді як для останнього він представлений лапласієвої матрицею\(L\) (зверніть увагу ще раз, що їх ознаки протилежні історичній біді!). Мережеві моделі дозволяють вивчати більш складні, нетривіальні просторові структури, але між цими двома структурами моделювання немає принципово різних аспектів. Ось чому однаковий аналітичний підхід працює для обох.
Зауважте, що аналіз синхронізації, який ми розглянули в цьому розділі, все ще досить обмежений у своїй застосовності до більш складних динамічних мережевих моделей. Він спирається на припущення, що динамічні вузли є однорідними і що вони лінійно пов'язані, тому аналіз не може узагальнити поведінку гетерогенних динамічних мереж з нелінійними зв'язками, наприклад, модель Курамото, розглянута в розділі 16.2, в якій вузли коливаються в різні частоти і їх муфти нелінійні. Аналіз таких мереж потребуватиме більш просунутих нелінійних аналітичних прийомів, що виходить за рамки даного підручника.