3.3.1: Приклади
- Page ID
- 61754

Приклад 3.3.1.1: Рівняння Белтрамі
\ begin {екнаррей}
\ мітка {belt1}\ тег {3.3.1.1}
WU_X-BV_X-CV_Y&=&0\
\ мітка {belt2}\ тег {3.3.1.2}
WU_Y+AV_X+BV_Y&=&0,
\ end {eqnarray}
де\(W,\ a,\ b,\ c\) задані функції в залежності від\((x,y)\),\(W\not=0\) і матриця
$
\ ліворуч (\ begin {масив} {cc}
a&b\
b&c
\ end {масив}\ праворуч)
\]
є позитивним певним.
Система Бельтрамі є узагальненням рівнянь Коші-Рімана. Функція\(f(z)=u(x,y)+iv(x,y)\), де\(z=x+iy\), називається квазівідповідним відображенням, див. Наприклад [9], Глава 12, для застосування до рівнянь з частинними похідними.
Набір
$
A^1=\ лівий (\ begin {масив} {cc}
W&-b\\
0&a
\ end {масив}\ праворуч),\\
A^2=\ left (\ begin {масив} {cc}
0&-c\\
w&b
\ end {масив}\ праворуч).
\]
Тоді систему (\ ref {belt1}), (\ ref {belt2}) можна записати як
$
A^1\ left (\ begin {масив} {c}
u_x\ v_x
\ кінець {масив}\ праворуч) +
A^2\ ліворуч (\ begin {масив} {c}
u_y
\ end {масив}\ право) =\ left (\ begin {масив} {c} 0\ end {масив}\ праворуч).
\]
Таким чином,
\ begin {екнаррай*}
C (x, y,\ зета) =\ ліворуч |\ почати {масив} {cc}
W\ zeta_1&-b\ zeta_1-c\ zeta_2\\
W\ zeta_2&a\ zeta_1+b\ zeta_2
\ кінець {масив}\ право|
= W (a\ zeta_1^2+2b zeta_1\ zeta_2+c\ zeta_2^2),
\ end {екнаррай*}
який відрізняється від нуля, якщо\(\zeta\not=0\) за вищевказаними припущеннями. Таким чином, система Бельтрамі є еліптичною.
Приклад 3.3.1.2: Рівняння Максвелла
Рівняння Максвелла в ізотропному випадку
\ begin {eqnarray}
\ мітка {max1}\ тег {3.3.1.3}
c\\ текст {rot} _x\ H &=&\ лямбда E+\ epsilon e_t\
\ мітка {max2}\ тег {3.3.1.4}
c\ text {rot} _x\ E&=&-\ mu H_t,
\ end {eqnarray}
де
- \(E=(e_1,e_2,e_3)^T\)напруженість електричного поля\(e_i=e_i(x,t)\),\(x=(x_1,x_2,x_3)\),
- \(H=(h_1,h_2,h_3)^T\)напруженість магнітного поля\(h_i=h_i(x,t)\),
- \(c\)швидкість світла,
- \(\lambda\)питома провідність,
- \(\epsilon\)постійна діелектричність,
- \(\mu\)магнітна проникність.
Ось\(c,\ \lambda,\ \epsilon\) і\(\mu\) позитивні константи.
Набір\(p_0=\chi_t,\ p_i=\chi_{x_i}\)\(i=1,\ldots 3\), то характерне диференціальне рівняння
$
\ ліворуч |\ почати {масив} {cccccc}
\ епсилон p_0/c&0&0&0&p_3&-p_2\\
0&\ епсилон
p_0/c&0&-p_3&0&0&0&0&0&епсилон p_0/c&-2&-p_1&0\\
0&0&0 p_3&p_2&\ му р_0/с&0&0\\
p_3&0&-p_1&0&\ му p_0/c&0\\
-p_2&p_1&0&0&\ му p_0/c
\ кінець {масив}\ право|= 0.
\]
Наступні маніпуляції спрощують це рівняння:
- Перші три стовпці множимо на\(\mu p_0/c\),
- помножте 5-й стовпець з\(-p_3\) і 6-й стовпець з\(p_2\) і додайте суму до 1-го стовпця,
- помножте 4-й стовпець з\(p_3\) і 6-й стовпець з\(-p_1\) і додайте суму до 2-го стовпця,
- помножте 4-й стовпець з\(-p_2\) і 5-й стовпець з\(p_1\) і додайте суму до 3-го стовпця,
- розгорніть отриманий визначник щодо елементів 6-го, 5-го і 4-го ряду.
Отримуємо
$
\ ліворуч |\ почати {масив} {ccc}
q+p_1^2&p_1p_2&p_1p_3\\
p_1p_2&q+p_2^2&p_2p_3\\ p_1p_3&q+p_3^2
\ кінець {масив}\ право|=0,
\]
де
$
q: =\ frac {\ епсилон\ му} {c^2} p_0^2-g^2
\]
с\(g^2:=p_1^2+p_2^2+p_3^2\). Оцінка вищевказаного рівняння призводить до\(q^2(q+g^2)=0\), тобто,
$
\ chi_t^2\ ліворуч (\ frac {\ epsilon\ mu} {c^2}\ chi_t^2-|\ nabla_x\ chi|^2\ праворуч) =0.
\]
Відразу випливає, що рівняння Максвелла - це гіперболічна система, див. Вправу.
Існує два розв'язки цього характеристичного рівняння. Перші - це характерні поверхні\(\mathcal{S}(t)\), визначені тим\(\chi(x,t)=0\), які задовольняють\(\chi_t=0\). Ці поверхні називаються стаціонарними хвилями. Другий тип характерних поверхонь визначається розчинами
$
\ frac {\ епсилон\ му} {c^2}\ chi_t^2=|\ nabla_x\ chi|^2.
\]
Функції,\(\chi=f(n\cdot x-Vt)\) визначені, є розв'язками цього рівняння.
Ось\(f(s)\) довільна функція з\(f'(s)\not=0\),\(n\) є одиничним вектором і\(V=c/\sqrt{\epsilon\mu}\).
Пов'язані\(\mathcal{S}(t)\) характерні поверхні визначаються
$
\ чі (х, т)\ екв f (n\ cdot Х-ВТ) =0,
\]
Тут ми припускаємо, що\(0\) знаходиться в діапазоні\(f:\ \mathbb{R}^1\mapsto\mathbb{R}^1\). Таким чином,\(\mathcal{S}(t)\) визначається тим\(n\cdot x-Vt=c\), де\(c\) знаходиться фіксована константа. Звідси випливає, що площини\(\mathcal{S}(t)\) з нормальною швидкістю\(n\) рухаються\(V\) у напрямку\(n\), див. Малюнок 3.3.1.1.

Малюнок 3.3.1.1:\(d'(t)\) це швидкість плоских хвиль
\(V\)називається швидкістю плоскої хвилі\(\mathcal{S}(t)\).
Зауваження. Згідно з попередніми обговореннями, особливості розв'язку рівнянь Максвелла розташовані максимум на характерних поверхнях.
Окремим випадком рівнянь Максвелла є телеграфні рівняння, які випливають з рівнянь Максвелла if\(\text{\div}\ E=0\) і\(\text{div}\ H=0$\) i. e.,\(E\) і\(H\) є полями, вільними від джерел. Насправді, достатньо припустити, що це припущення задовольняється\(t_0\) лише у встановлений час, див. Вправу.
Так як
$
\ текст {rot} _x\\ текст {rot} _x\ A=\ mbox {град} _x\\ текст {div} _x\ A-\ трикутник_ха
\]
для кожного\(C^2\) -векторного поля\(A\) з рівнянь Максвелла випливає незв'язана система
\ begin {екнаррай*}\ трикутник_xe&= &\ frac {\ epsilon\ му} {c^2} E_ {tt} +\ frac {\ лямбда\ му} {c^2} E_t\
\ трикутник_xh&=&\ frac {\ epsilon\ mu} {c^2} H_ {tt} +\ frac {\ лямбда\ му} {c^2} h_t.
\ end {еканаррай*}
Приклад 3.3.1.3: Рівняння газодинаміки
Розглянемо наступні квазілінійні рівняння першого порядку.
$$
v_t+ (v\ cdot\ nabla_x)\ v+\ frac {1} {\ rho}\ nabla_x p =f\\\ mbox {(рівняння Ейлера)}.
\]
Ось
- \(v=(v_1,v_2,v_3)\)вектор швидкості\(v_i=v_i(x,t)\),\(x=(x_1,x_2,x_3)\),
- \(p\)тиск\(p=(x,t)\),
- \(\rho\)щільність\(\rho=\rho(x,t)\),
- \(f=(f_1,f_2,f_3)\)щільність зовнішньої сили\(f_i=f_i(x,t)\),
\((v\cdot\nabla_x)v\equiv (v\cdot\nabla_x v_1,v\cdot\nabla_x v_2,v\cdot\nabla_x v_3))^T\).
Друге рівняння
$
\ rho_t+v\ cdot\ nabla_x\ rho+\ rho\\ text {div} _x\ v=0\\\ mbox {(збереження маси)}.
\]
Припустимо, що газ стисливий і що існує функція (рівняння стану)
$
р=р (\ рхо),
\]
де\(p'(\rho)>0\) якщо\(\rho>0\). Тоді вищевказана система з чотирьох рівнянь
\ begin {eqnarray}
\ мітка {лінійка}\ тег {3.3.1.5}
v_t+ (v\ cdot\ nabla) v+\ frac {1} {\ rho} p' (\ rho)\ nabla\ rho&=&f\\
\ етикетка {cont}\ тег {3.3.1.6}
\ rho_t+\ rho\ text {div}\ v+v\ dot\ nabla\ rho&=&0,
\ end {екнаррей}
де\(\nabla\equiv\nabla_x\) і\(\text{div}\equiv\text{div}_x\), тобто, ці оператори застосовуються лише до просторових змінних.
Характерне диференціальне рівняння тут
$$
\ left|\ begin {масив} {cccc}
\ frac {d\ chi} {dt} &0&\ frac {1} {\ rho} p'\ chi_ {x_1}\\
0&\ frac {d\ chi} {dt} &0&\ frac {1} {\ rho} p'\ chi_ {xi_ {xi_ {xi_ {x_ _2}\\
0&0&\ розриву {d\ chi} {dt} &\ розриву {1} {\ rho} p '\ chi_ {x_3}\\ rho
\ chi_ {x_1} &\ rho\ chi_ {x_2} &\ rho\ chi_ {x_3} &\ frac {d\ chi} {dt}
\ кінець {масив}\ right|= 0,
\]
де
$\ dfrac {д\ чі} {dt} :=\ chi_t+ (\ nabla_x\ chi)\ cdot v.\]
Оцінюючи детермінанту, отримаємо характеристичне диференціальне рівняння
\ begin {рівняння}
\ мітка {chargas}\ тег {3.3.1.7}
\ лівий (\ frac {d\ chi} {dt}\ праворуч) ^2\ ліворуч (\ frac {d\ chi} {dt}\ праворуч) ^2-p '(\ rho) |\ nabla_x\ chi|^2\ праворуч) =0.
\ end {рівняння}
Це рівняння має на увазі наслідки для швидкості характерних поверхонь, як показує наступний розгляд.
Розглянемо\(\mathcal{S}(t)\) сімейство поверхонь в\(\mathbb{R}^3\) визначається\(\chi(x,t)=c\), де
\(x\in\mathbb{R}^3 \) і\(c\) є фіксованою константою. Як зазвичай, ми припускаємо, що\(\nabla_x\chi\not=0\).
Одна з двох нормалей на\(\mathcal{S}(t)\) точці поверхні\(\mathcal{S}(t)\) задається, див. вправу,
\ begin {рівняння}
\ label {surfnormal}\ tag {3.3.1.8}
{\ bf n} =\ frac {\ nabla_x\ chi} {|\ nabla_x\ chi|}.
\ end {рівняння}
Нехай\(Q_0\in\mathcal{S}(t_0)\) і нехай\(Q_1\in\mathcal{S}(t_1)\) буде точкою на лінії\(Q_0+s{\bf n}\), визначеної, де\({\bf n}\) нормаль (\ ref {surfnormal}) на\(\mathcal{S}(t_0)\) at\(Q_0\) і\(t_0<t_1\),\(t_1-t_0\) мала, див. Рис. 3.3.1.2.
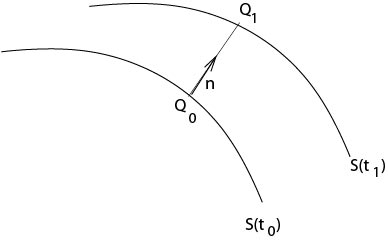
3.3.1.2: Визначення швидкості поверхні
Визначення. Обмеження
$$
P=\ lim_ {t_1\ to t_0}\ frac {|Q_1-Q_0|} {t_1-t_0}
$$
називається швидкістю поверхні\(\mathcal{S}(t)\).
Пропозиція 3.2. Швидкість поверхні\(\mathcal{S}(t)\) дорівнює
\ begin {рівняння}
\ label {speedsurf}
P=-\ frac {\ chi_t} {|\ nabla_x\ chi|}.
\ end {рівняння}
Доказ. Доказ випливає з\(\chi(Q_0,t_0)=0\) і\(\chi(Q_0+d{\bf n},t_0+\triangle t)=0\), де\(d=|Q_1-Q_0|\) і\(\triangle t=t_1-t_0\).
\(\Box\)
Встановити\(v_n:=v\cdot{\bf n}\), який є складовою вектора швидкості в напрямку\({\bf n}\).
З ({\ ref {surfnormal}) отримуємо
$
v_n=\ frac {1} {|\ nabla_x\ chi|} v\ cdot\ nabla_x\ chi.
\]
Визначення. \(V:=P-v_n\), Різниця швидкості поверхні і швидкості рідких частинок, називається відносною швидкістю.
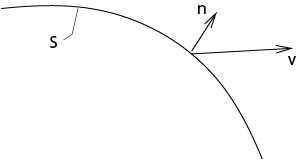
Малюнок 3.3.1.3: Визначення відносної швидкості
Використовуючи\(P\) наведені вище формули для і\(v_n\) слід
$
v=p-v_n=-\ frac {\ chi_t} {|\ nabla_x\ chi|} -\ frac {v\ cdot\ nabla_x\ chi} {|\ nabla_x\ chi|} дт}.
$$
Тоді з характеристичного рівняння (\ ref {chargas}), що
$$
V^2|\ nabla_x\ chi|^2\ left (V^2|\ nabla_x\ chi|^2-p '(\ rho) |\ nabla_x\ chi|^2\ праворуч) =0.
$$
Цікавим висновком є те, що існує дві відносні швидкості:\(V=0\) або\(V^2=p'(\rho)\).
Визначення. \(\sqrt{p'(\rho)}\)називається швидкістю звуку.