5: Поведінка поблизу Equilbria - лінеаризація
- Page ID
- 61135

Зараз ми розглянемо кілька прикладів для вирішення, і розуміння природи рішень,
\[\dot{x} = Ax, x \in \mathbb{R}^2. \label{5.1}\]
Для всіх прикладів метод вирішення системи однаковий.
Кроки для вирішення
- Крок 1. Обчислити власні значення\(A\).
- Крок 2. Обчислити власні вектори\(A\).
- Крок 3. Використовуйте власні вектори\(A\) для формування матриці перетворення\(T\).
- Крок 4. Обчислити\(\Lambda = T^{-1}AT\).
- Крок 5. Обчислити\(e^{At} = Te^{\lambda t}T^{-1}\).
Після того, як ми обчислили,\(e^{At}\) ми маємо рішення Equation\ ref {5.1} через будь-яку початкову умову\(y(t)\)\(y(0) = y_{0}\),\(y_{0}\) оскільки,, задається\(y(t) = e^{At}y_{0}\).
Приклад\(\PageIndex{10}\)
Розглянемо наступні лінійні, автономні ОДУ:
\[\begin{pmatrix} {\dot{x_{1}}}\\ {\dot{x_{2}}} \end{pmatrix} = \begin{pmatrix} {2}&{1}\\ {1}&{2} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} \label{5.2}\]
де
\[A = \begin{pmatrix} {2}&{1}\\ {1}&{2} \end{pmatrix}, \label{5.3}\]
Крок 1. Обчислити власні значення A.
Власні значення А, що позначаються\(\lambda\), задаються розв'язками характеристичного многочлена:
\(det \begin{pmatrix} {2-\lambda}&{1}\\ {1}&{2-\lambda} \end{pmatrix} = (2-\lambda)^2-1 = 0\)
\[= \lambda^{2}-4\lambda+3 = 0, \label{5.4}\]
або
\(\lambda_{1,2} = 2 \pm \frac{1}{2}\sqrt{16-12} = 3, 1\)
Крок 2. Обчислити власні вектори A.
Для кожного власне значення обчислюємо відповідний власнийвектор. Свій вектор, відповідний власному значенню 3, знаходить шляхом розв'язання:
\[\begin{pmatrix} {2}&{1}\\ {1}&{2} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} = 3\begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.5}\]
або
\[2x_{1}+x_{2} = 3x_{1}, \label{5.6}\]
\[x_{1}+2x_{2} = 3x_{2}. \label{5.7}\]
Обидва ці рівняння дають одне і те ж рівняння, оскільки два рівняння залежні:
\[x_{2} = x_{1} \label{5.8}\].
Тому приймаємо як власний вектор, відповідний власному значенню 3:
\[\begin{pmatrix} {1}\\ {1} \end{pmatrix} \label{5.9}\]
Далі обчислюємо власне вектор, відповідний власному значенню 1. Це дається розв'язком наступних рівнянь:
\[\begin{pmatrix} {2}&{1}\\ {1}&{2} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} = \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.10}\]
або
\[2x_{1}+x_{2} = x_{1}, \label{5.11}\]
\[x_{1}+2x_{2} = x_{2}. \label{5.12}\]
Обидва ці рівняння дають одне і те ж рівняння:
\[x_{2} = -x_{1}. \label{5.13}\]
Тому візьмемо за свій вектор, відповідний власному значенню:
\[\begin{pmatrix} {1}\\ {-1} \end{pmatrix} \label{5.14}\]
Крок 3. Використовуйте власні вектори A для формування матриці перетворення T.
Для стовпців\(T\) візьмемо власні вектори, відповідні власним значенням 1 і 3:
\[T = \begin{pmatrix} {1}&{1}\\ {-1}&{1} \end{pmatrix} \label{5.15}\]
з оберненою заданою:
\[T^{-1} = \frac{1}{2}\begin{pmatrix} {1}&{-1}\\ {1}&{1} \end{pmatrix} \label{5.16}\]
Крок 4. Обчислити\(\Lambda = T^{-1}AT\).
У нас є:
\(T^{-1}AT = \dfrac{1}{2}\begin{pmatrix} {1}&{-1}\\ {1}&{1} \end{pmatrix} \begin{pmatrix} {2}&{1}\\ {1}&{2} \end{pmatrix} \begin{pmatrix} {1}&{1}\\ {-1}&{1} \end{pmatrix}\)
\( = \frac{1}{2}\begin{pmatrix} {1}&{-1}\\ {1}&{1} \end{pmatrix} \begin{pmatrix} {1}&{3}\\ {-1}&{3} \end{pmatrix}\)
\[= \begin{pmatrix} {1}&{0}\\ {0}&{3} \end{pmatrix} \equiv \Lambda \label{5.17}\]
Тому в\(u_{1}-u_{2}\) координатах (5.2) стає:
\[\begin{pmatrix} {\dot{u_{1}}}\\ {\dot{u_{2}}} \end{pmatrix} = \begin{pmatrix} {1}&{0}\\ {0}&{3} \end{pmatrix} \begin{pmatrix} {u_{1}}\\ {u_{2}} \end{pmatrix} \label{5.18}\]
У\(u_{1}-u_{2}\) координатах легко помітити, що початок є нестійкою точкою рівноваги.
Крок 5. Обчислити\(e^{At} = Te^{\lambda t}T^{-1}\).
У нас є:
\(e^{AT} = \frac{1}{2}\begin{pmatrix} {1}&{1}\\ {-1}&{1} \end{pmatrix} \begin{pmatrix} {e^{t}}&{0}\\ {0}&{e^{3t}} \end{pmatrix} \begin{pmatrix} {1}&{-1}\\ {1}&{1} \end{pmatrix}\)
\(= \frac{1}{2}\begin{pmatrix} {1}&{1}\\ {-1}&{1} \end{pmatrix} \begin{pmatrix} {e^{t}}&{-e^{t}}\\ {e^{3t}}&{e^{3t}} \end{pmatrix}\)
\[= \begin{pmatrix} \frac{1}{2}{e^{t}+e^{3t}}&{-e^{t}+e^{3t}}\\ {-e^{t}+e^{3t}}&{e^{t}+e^{3t}} \end{pmatrix} \label{5.19}\]
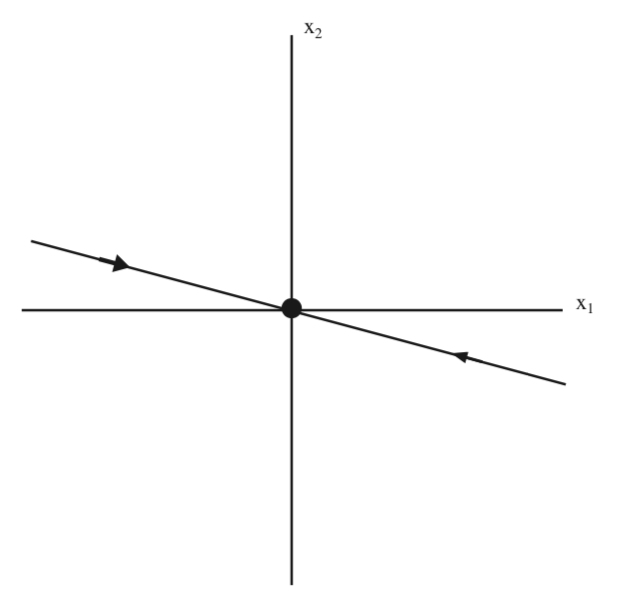
Ми бачимо, що походження також нестабільне в вихідних\(x_{1}-x_{2}\) координатах. Його відносять до джерела, і це характеризується тим, що всі власні значення А мають позитивну дійсну частину. Фазовий портрет проілюстрований на рис.5.1.
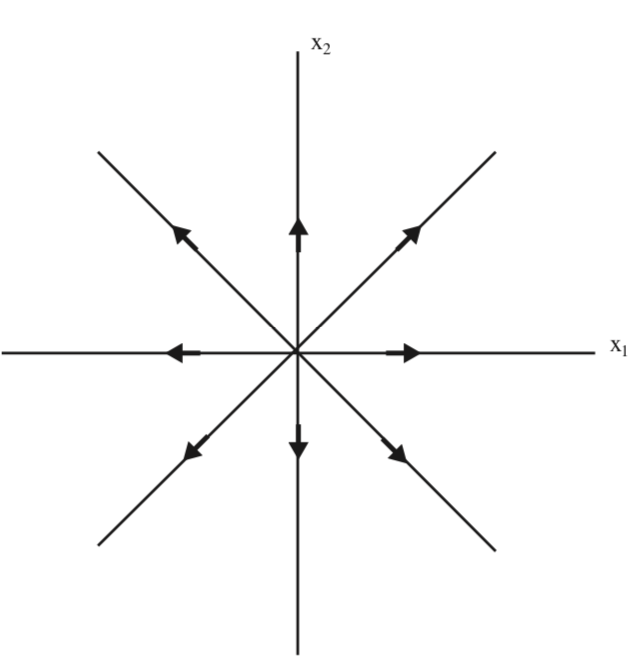
Зауважимо це можна зробити висновок про поведінку\(e^{At}\) як\(t \rightarrow \infty\) з поведінки,\(e^{\Lambda t}\)\(t \rightarrow \infty\) оскільки Т не залежить від t.
Приклад\(\PageIndex{11}\)
Розглянемо наступні лінійні, автономні ОДУ:
\[\begin{pmatrix} {\dot{x_{1}}}\\ {\dot{x_{2}}} \end{pmatrix} = \begin{pmatrix} {-1}&{-1}\\ {9}&{-1} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} \label{5.20}\]
де
\[A = \begin{pmatrix} {-1}&{-1}\\ {9}&{-1} \end{pmatrix}, \label{5.21}\]
Крок 1. Обчислити власні значення A.
Власні значення А, що позначаються\(\lambda\), задаються розв'язками характеристичного многочлена:
\(det \begin{pmatrix} {-1-\lambda}&{-1}\\ {9}&{-1-\lambda} \end{pmatrix} = (-1-\lambda)^2+9 = 0\),
\[= \lambda^{2}+2\lambda+10 = 0, \label{5.22}\]
або
\(\lambda_{1,2} = -1 \pm \frac{1}{2}\sqrt{4-40} = -1 \pm 3i\)
Власні вектори є складними, тому ми знаємо, що він не діагональний над дійсними числами. Це означає, що ми не можемо знайти реальні власні вектори, щоб він міг бути перетворений у форму, де є дійсні числа на діагоналі та нулі у записах поза діагоналлю. Найкраще, що ми можемо зробити, це перетворити його у форму, де реальні частини власне значення знаходяться на діагоналі, а уявні частини знаходяться на вимкненому діагональному розташуванні, але вимкнені діагональні елементи відрізняються знаком мінус.
Крок 2. Обчислити власні вектори A.
Власний вектор A, відповідний власному вектору,\(-1-3i\) є розв'язком наступних рівнянь:
\[\begin{pmatrix} {-1}&{-1}\\ {9}&{-1} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} = (-1-3i) \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.23}\]
або
\[-x_{1}-x_{2} = -x_{1}-3ix_{2}, \label{5.24}\]
\[9x_{1}-x_{2} = -x_{2}-3ix_{2}. \label{5.25}\]
Розв'язок цих рівнянь дається:
\(\begin{pmatrix} {1}\\ {3i} \end{pmatrix} = \begin{pmatrix} {1}\\ {0} \end{pmatrix}+i \begin{pmatrix} {0}\\ {3} \end{pmatrix}\)
Крок 3. Використовуйте власні вектори A для формування матриці перетворення T.
Для першого стовпця T візьмемо дійсну частину свого вектора, відповідну власному значенню\(-1-3i\), а для другого - комплексну частину свого вектора:
\[T = \begin{pmatrix} {1}&{0}\\ {0}&{3} \end{pmatrix} \label{5.26}\]
з оберненою заданою:
\[T^{-1} = \begin{pmatrix} {1}&{0}\\ {0}&{\frac{1}{3}} \end{pmatrix} \label{5.27}\]
Крок 4. Обчислити\(\Lambda = T^{-1}AT\).
\(T^{-1}AT = \frac{1}{2}\begin{pmatrix} {1}&{0}\\ {0}&{\frac{1}{3}} \end{pmatrix} \begin{pmatrix} {-1}&{-1}\\ {9}&{-1} \end{pmatrix} \begin{pmatrix} {1}&{0}\\ {0}&{3} \end{pmatrix}\)
\(= \begin{pmatrix} {1}&{0}\\ {0}&{\frac{1}{3}} \end{pmatrix} \begin{pmatrix} {-1}&{-3}\\ {9}&{-3} \end{pmatrix}\)
\[= \begin{pmatrix} {-1}&{-3}\\ {3}&{-1} \end{pmatrix} \equiv \Lambda \label{5.28}\]
\(\Lambda\)У цій формі ми знаємо з попереднього розділу, що:
\[e^{\Lambda t} = e^{-t}\begin{pmatrix} {cos3t}&{-sin3t}\\ {sin3t}&{cos3t} \end{pmatrix} \label{5.29}\]
Тоді у нас є:
\(e^{At} = Te^{\Lambda t}T^{-1}\).
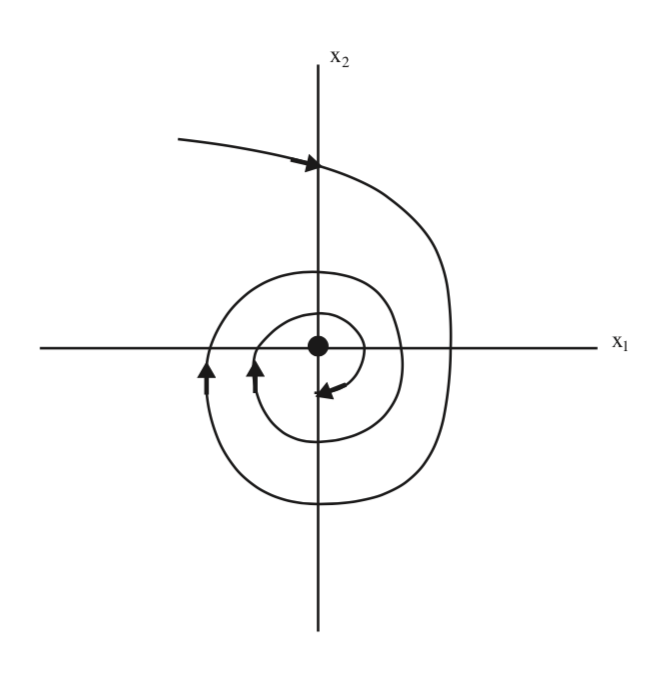
З цього виразу можна зробити висновок, що\(e^{At} \rightarrow 0\) як\(t \rightarrow \infty\). Звідси походження асимптотично стабільне. Його називають раковиною, і вона характеризується реальними частинами власних значень А, що є негативними. Фазова площина начерчена на рис.5.2.
Приклад\(\PageIndex{12}\)
Розглянемо наступні лінійні, автономні ОДУ:
\[\begin{pmatrix} {\dot{x_{1}}}\\ {\dot{x_{2}}} \end{pmatrix} = \begin{pmatrix} {-1}&{1}\\ {1}&{1} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} \label{5.30}\]
де
\[A = \begin{pmatrix} {-1}&{1}\\ {1}&{1} \end{pmatrix}, \label{5.31}\]
Крок 1. Обчислити власні значення A.
Власні значення А, що позначаються\(\lambda\), задаються розв'язками характеристичного многочлена:
\(det \begin{pmatrix} {-1-\lambda}&{1}\\ {1}&{1-\lambda} \end{pmatrix} = (-1-\lambda)(1-\lambda)-1 = 0\)
\[= \lambda^{2}-2 = 0, \label{5.32}\]
які є
\(\lambda_{1,2} = \pm\sqrt{2}\)
Крок 2. Обчислити власні вектори A.
Власний вектор, відповідний власному значенню,\(\sqrt{2}\) задається розв'язком наступних рівнянь:
\[\begin{pmatrix} {-1}&{1}\\ {1}&{1} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} = \sqrt{2}\begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.33}\]
або
\[-x_{1}+x_{2} = \sqrt{2}x_{1}, \label{5.34}\]
\[x_{1}+x_{2} = \sqrt{2}x_{2}. \label{5.35}\]
Рішення дається:
\(x_{2} = (1+\sqrt{2})x_{1}\).
що відповідає власному вектору
\(\begin{pmatrix} {1}\\ {1+\sqrt{2}} \end{pmatrix}\)
Власний вектор, відповідний власному значенню,\(-\sqrt{2}\) задається розв'язком наступних рівнянь:
\[\begin{pmatrix} {-1}&{1}\\ {1}&{1} \end{pmatrix} \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix} = -\sqrt{2}\begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.36}\]
або
\[-x_{1}+x_{2} = -\sqrt{2}x_{1}, \label{5.37}\]
\[x_{1}+x_{2} = -\sqrt{2}x_{2}. \label{5.38}\]
Рішення дається:
\(x_{2} = (1-\sqrt{2})x_{1}\).
що відповідає власному вектору:
\(\begin{pmatrix} {1}\\ {1-\sqrt{2}} \end{pmatrix}\)
Крок 3. Використовуйте власні вектори A для формування матриці перетворення T.
Для стовпців T візьмемо власні вектори, відповідні власним значенням\(\sqrt{2}\) і\(-\sqrt{2}\):
\[T = \begin{pmatrix} {1}&{1}\\ {1+\sqrt{2}}&{1-\sqrt{2}} \end{pmatrix} \label{5.39}\]
з оберненою заданою:
\[T^{-1} = -\frac{1}{2\sqrt{2}}\begin{pmatrix} {1-\sqrt{2}}&{-1}\\ {-1-\sqrt{2}}&{1} \end{pmatrix} \label{5.40}\]
Крок 4. Обчислити\(\Lambda = T^{-1}AT\). У нас є:
\(T^{-1}AT = -\frac{1}{2\sqrt{2}}\begin{pmatrix} {1-\sqrt{2}}&{-1}\\ {-1-\sqrt{2}}&{1} \end{pmatrix} \begin{pmatrix} {-1}&{1}\\ {1}&{1} \end{pmatrix} \begin{pmatrix} {1}&{1}\\ {1+\sqrt{2}}&{1-\sqrt{2}} \end{pmatrix}\)
\(= -\frac{1}{2\sqrt{2}}\begin{pmatrix} {1-\sqrt{2}}&{-1}\\ {-1-\sqrt{2}}&{1} \end{pmatrix} \begin{pmatrix} {\sqrt{2}}&{-\sqrt{2}}\\ {2+\sqrt{2}}&{2-\sqrt{2}} \end{pmatrix}\)
\[= \begin{pmatrix} {\sqrt{2}}&{0}\\ {0}&{-\sqrt{2}} \end{pmatrix} \equiv \Lambda \label{5.41}\]
Тому в\(u_{1}-u_{2}\) координатах (5.30) стає:
\[\begin{pmatrix} {\dot{u_{1}}}\\ {\dot{u_{2}}} \end{pmatrix} = \begin{pmatrix} {\sqrt{2}}&{0}\\ {0}&{-\sqrt{2}} \end{pmatrix} \begin{pmatrix} {u_{1}}\\ {u_{2}} \end{pmatrix} \label{5.42}\]
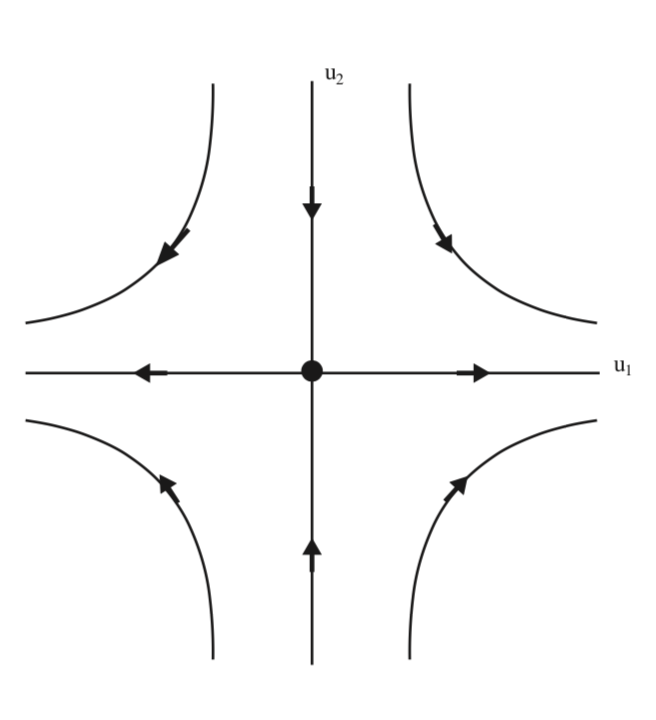
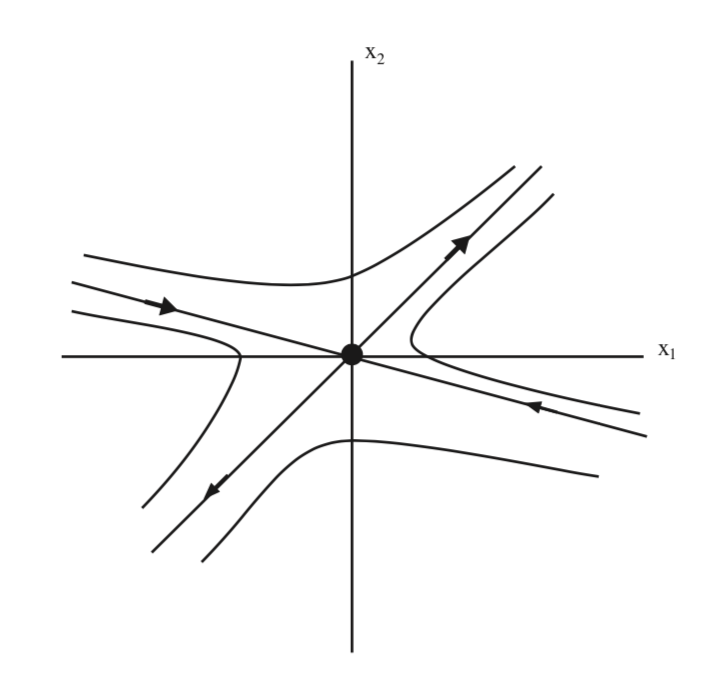
Фазовий портрет (5.42) показаний в 5.3.
Легко помітити, що походження нестабільне для (5.42). На рис. 5.3 ми бачимо, що походження має структуру сідлової точки, і ми хочемо вивчити цю ідею далі.
У\(u_{1}-u_{2}\) координатах проліт власноговектора, відповідного власному значенню,\(\sqrt{2}\) задається\(u_{2} = 0\), тобто\(u_{1}\) віссю. Проліт власного вектора, відповідного власному значенню,\(-\sqrt{2}\) задається\(u_{1} = 0\), тобто\(u_{2}\) віссю. Більш того, ми бачимо з форми (5.42), що ці координатні осі є інваріантними. \(u_{1}\)Віссю називають нестабільним підпростором, позначається\(E^{u}\), а\(u_{2}\) вісь іменується як стійкий підпростір, позначається\(E^{s}\). Іншими словами, нестабільний підпростір - це проміжок свого вектора, відповідного власному значенню з додатною дійсною частиною, а стабільний підпростір - проліт свого вектора, відповідного власному значенню, що має від'ємну дійсну частину. Стабільні та нестабільні підпростори є інваріантними підпросторами щодо потоку, породженого (5.42).
Стабільні та нестабільні підпростори відповідають осям координат у системі координат, заданих власними векторами. Далі ми хочемо зрозуміти, як вони будуть відображатися в вихідних\(x_{1}-x_{2}\) координатах. Це досягається шляхом перетворення їх у вихідні координати за допомогою матриці перетворення (Equation\ ref {5.39}).
Спочатку ми трансформуємо нестабільний підпростір від\(u_{1}-u_{2}\) координат до\(x_{1}-x_{2}\) координат. У\(u_{1}-u_{2}\) координатах точки на нестабільному підпросторі мають координати\((u_{1}, 0)\). Діючи на ці точки з Т дає:
\[T\begin{pmatrix} {u_{1}}\\ {0} \end{pmatrix} = \begin{pmatrix} {1}&{1}\\ {1+\sqrt{2}}&{1-\sqrt{2}} \end{pmatrix} \begin{pmatrix} {u_{1}}\\ {0} \end{pmatrix} = \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.43}\]
що дає наступне відношення між точками на нестабільному підпросторі в\(u_{1}-u_{2}\) координатах до точок\(x_{1}-x_{2}\) координат:
\[u_{1} = x_{1}, \label{5.44}\]
\[(1+\sqrt{2})u_{1} = x_{2}, \label{5.45}\]
або
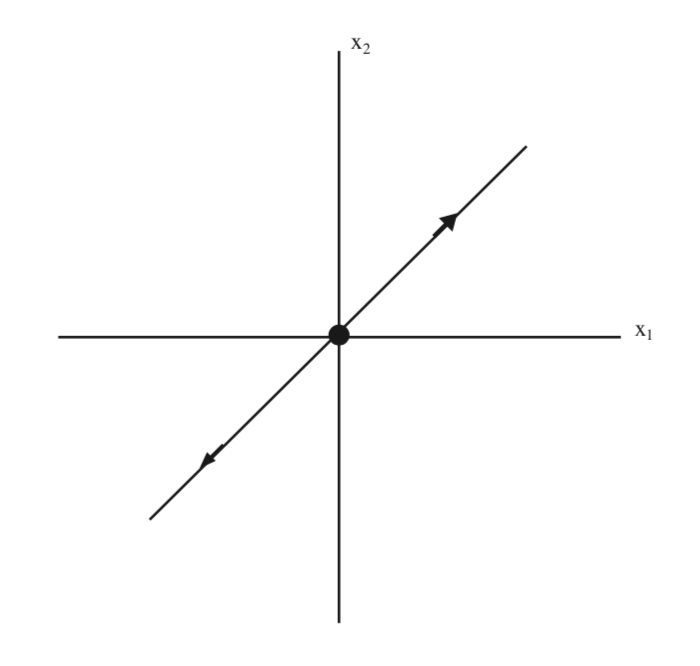
\[(1 + \sqrt{2})x_{1} = x_{2}. \label{5.46}\]
Це рівняння для нестабільного підпростору в\(x_{1}-x_{2}\) координатах, яке ми проілюструємо на рис.5.4.
Далі ми трансформуємо стабільний підпростір від\(u_{1}-u_{2}\) координат до\(x_{1}-x_{2}\) координат. У\(u_{1}-u_{2}\) координатах точки на стійкому підпросторі мають координати\((0, u_{2})\). Діючи на ці точки з Т дає:
\[T\begin{pmatrix} {0}\\ {u_{2}} \end{pmatrix} = \begin{pmatrix} {1}&{1}\\ {1+\sqrt{2}}&{1-\sqrt{2}} \end{pmatrix} \begin{pmatrix} {0}\\ {u_{2}} \end{pmatrix} = \begin{pmatrix} {x_{1}}\\ {x_{2}} \end{pmatrix}, \label{5.47}\]
що дає наступне відношення між точками на стабільному підпросторі в\(u_{1}-u_{2}\) координатах до точок\(x_{1}-x_{2}\) координат:
\[u_{2} = x_{1}, \label{5.48}\]
\[(1-\sqrt{2})u_{2} = x_{2}, \label{5.49}\]
або
\[(1-\sqrt{2})x_{1} = x_{2}. \label{5.50}\]
Це рівняння для стійкого підпростору в\(x_{1}-x_{2}\) координатах, яке ми проілюструємо на рис.5.5.
На рис. 5.6 ми проілюструємо як стабільний, так і нестабільний підпростори у вихідних координатах.
Тепер ми хочемо обговорити деякі загальні результати з цих трьох прикладів.
Для всіх трьох прикладів дійсні частини власних значень A були ненульовими, а стабільність походження визначалася знаком дійсних частин власних значень, наприклад, наприклад 10 походження було нестабільним (дійсні частини власних значень А були позитивними), наприклад 11 походження було стабільним ( дійсні частини власних значень A були від'ємними), а наприклад 12 походження було нестабільним (A мав одне додатне власне значення та одне від'ємне власне значення). Це, як правило, вірно для всіх лінійних автономних векторних полів. Ми констатуємо це більш формально.
Розглянемо лінійне, автономне векторне поле на\(\mathbb{R}^n\):
\[\dot{y} = Ay, y(0) = y_{0}, y \in \mathbb{R}^n. \label{5.51}\]
Тоді якщо А не має власних значень, що мають нульові дійсні частини, стійкість початку визначається дійсними частинами власних значень А. Якщо всі дійсні частини власних значень строго менше нуля, то походження асимптотично стійке. Якщо хоча б одне з власних значень А має дійсну частину строго більше нуля, то походження нестабільне.
Існує термін, застосований до цієї термінології, який пронизує всю теорію динамічних систем.
ВИЗНАЧЕННЯ 20: ГІПЕРБОЛІЧНА ТОЧКА РІВНОВАГИ
Походження рівняння\ ref {5.51} вважається, якщо жодна з дійсних частин власних значень A не має нульових дійсних частин.
Звідси випливає, що гіперболічні рівноваги лінійних, автономних векторних полів на\(\mathbb{R}^n\) можуть бути або потоками, або джерелами, або сідлами. Ключовим моментом є те, що власні значення A мають ненульові дійсні частини.
Якщо обмежитися двома вимірами, то можна скласти (короткий) список всіх різних канонічних форм для А. ці дані наступними шістьма\(2 \times 2\) матрицями.
Перша - діагональна матриця з дійсними, ненульовими власними значеннями\(\lambda, \mu \ne 0\), тобто початком є гіперболічна фіксована точка:
\[\begin{pmatrix} {\lambda}&{0}\\ {0}&{\mu} \end{pmatrix} \label{5.52}\]
У цьому випадку orgin може бути потоком, якщо обидва власні значення від'ємні, джерелом, якщо обидва власні значення є додатними, і сідлом, якщо власні значення мають протилежний знак.
Наступна ситуація відповідає комплексним власнимзначенням, при цьому дійсна частина\(\alpha\), і уявна частина\(\beta\), причому обидва є ненульовими. При цьому точка рівноваги гіперболічна, і\(\alpha\) потоком для\(\alpha < 0\), і джерелом для\(\alpha > 0\). Ознака\(\beta\) не впливає на стабільність:
\[\begin{pmatrix} {\alpha}&{\beta}\\ {\beta}&{-\alpha} \end{pmatrix} \label{5.53}\]
Далі ми розглянемо випадок, коли власні значення є дійсними, однаковими і ненульовими, але матриця є недіагональной, тобто два власні вектори знайти неможливо. У цьому випадку походження є гіперболічним для\(\lambda \ne 0\), і є раковиною для\(\lambda < 0\) і джерелом для\(\lambda > 0\):
\[\begin{pmatrix} {\lambda}&{1}\\ {0}&{\lambda} \end{pmatrix} \label{5.54}\]
Далі ми розглянемо деякі випадки, що відповідають походженню, що є негіперболічним, які можна було б включити в обговорення попередніх випадків, але більш повчально чітко вказати на ці випадки окремо.
Спочатку розглянемо випадок, коли A є діагональним з одним ненульовим дійсним власним значенням і одним нульовим власним значенням:
\[\begin{pmatrix} {\lambda}&{0}\\ {0}&{0} \end{pmatrix} \label{5.55}\]
Розглянемо випадок, коли дві власнізначення є чисто уявними,\(\pm i\sqrt{b}\). У цьому випадку походження - ref! Помилка в якості центру.
\[\begin{pmatrix} {0}&{\beta}\\ {-\beta}&{0} \end{pmatrix} \label{5.56}\]
Для повноти розглянемо випадок, коли обидва власні значення дорівнюють нулю, а A - діагоналі.
\[\begin{pmatrix} {0}&{0}\\ {0}&{0} \end{pmatrix} \label{5.57}\]
Нарешті, ми хочемо розширити дискусію, пов'язану з геометричними аспектами Прикладу 12. Нагадаємо, що для цього прикладу проміжок власне вектора, що відповідає власному значенню з від'ємною дійсною частиною, був інваріантним підпростором, іменованим стабільним підпростором. Траєкторії з початковими умовами в стабільному підпросторі занепали до нуля з експоненціальною швидкістю як\(t \rightarrow +\infty\). Стабільний інваріантний підпростір позначали\(E^s\). Аналогічно, проліт власне вектора, що відповідає власному значенню з додатною дійсною частиною, був інваріантним підпростором, іменованим нестабільним підпростором. Траєкторії з початковими умовами в нестабільному підпросторі занепали до нуля з експоненціальною швидкістю як\(t \rightarrow -\infty\). Нестійкий інваріантний підпростір позначали\(E^{u}\).
Ми можемо легко побачити, що Equation\ ref {5.52} має таку поведінку, коли\(\lambda\) і\(\mu\) мають протилежні ознаки. Якщо\(\lambda\) і\(\mu\) обидва негативні, то проміжок власних векторів, відповідних цим двом власним значенням\(\mathbb{R}^2\), є, а весь фазовий простір є стабільним підпростором. Аналогічно, якщо\(\lambda\) і обидва\(\mu\) позитивні, то проміжок власних векторів, відповідних цим двом власним значенням\(\mathbb{R}^2\), є, а весь фазовий простір є нестабільним підпростором.
Аналогічний випадок Equation\ ref {5.53}. Для цього випадку не існує пари дійсних власних векторів, що відповідають кожному з комплексних власних значень. Вектори, що перетворюють вихідну матрицю в цю канонічну форму, називаються узагальненими власними векторами. Якщо\(\alpha < 0\) проліт узагальнених власних векторів є\(\mathbb{R}^2\), то весь фазовий простір є стійким підпростором. Аналогічно, якщо\(\alpha > 0\) проліт узагальнених власнихвекторів є\(\mathbb{R}^2\), а весь фазовий простір є нестабільним підпростором. Аналогічна ситуація і для (5.54). Для\(\lambda < 0\) всього фазового простору є стійким підпростором, для\(\lambda > 0\) всього фазового простору - нестійким підпростором.
Справа в рівнянні\ ref {5.55} відрізняється. Проліт власне вектора,\(\lambda\) що відповідає, є стабільним підпростором для\(\lambda < 0\), а нестабільний підпростір для\(\lambda > 0\) Простір власних векторів, що відповідає нульовому власному значенню, називають центральним підпростором.
Для випадку (5.56) не існує двох дійсних власних векторів, що ведуть до отриманої канонічної форми. Швидше, існує два узагальнені власні вектори, пов'язані з цією парою складних власних значень, що мають нульову дійсну частину. Проліт цих двох власних векторів є двовимірним центральним підпростором, відповідним\(\mathbb{R}^2\). Точка рівноваги з чисто уявними власнимизначеннями іменується центром.
Нарешті, випадок у Equation\ ref {5.57} включений для повноти. Це нульове векторне поле, де\(\mathbb{R}^2\) знаходиться центр підпростору.
Ми можемо охарактеризувати стабільність походження за термінами стійкого, нестабільного та центрального підпросторів. Походження асимптотично стабільне якщо\(E^u = \emptyset\) і\(E^c = \emptyset\) .Походження нестабільне, якщо\(E^u \ne \emptyset\).