5.7: Термінологія
- Page ID
- 32072

Настав час ввести більш точне визначення таких термінів, як «швидкість» і «дозвіл», а також додаткову таксономію, яка використовується в роботизованому контексті.
Роботологи розрізняють активні і пасивні датчики. Активні датчики випромінюють якусь енергію і вимірюють реакцію навколишнього середовища. Пасивні датчики замість цього вимірюють енергію з навколишнього середовища. Наприклад, більшість датчиків відстані є активними датчиками (оскільки вони відчувають відображення сигналу, який вони випромінюють), тоді як акселерометр, компас або кнопка є пасивними датчиками.
Різниця між верхньою та нижньою межею кількості, яку датчик може вимірювати, відомий як його діапазон. Це не слід плутати з динамічним діапазоном, який є співвідношенням між найвищим та найнижчим значенням, яке може виміряти датчик. Зазвичай він виражається за логарифмічною шкалою (до основи 10), також відомої як «децибел». Мінімальна відстань між двома значеннями, які може виміряти датчик, відома як його роздільна здатність. Роздільна здатність датчика задається фізикою пристрою (наприклад, детектор світла може рахувати лише кратні кванту), але зазвичай обмежується процесом аналого-цифрового перетворення. Роздільну здатність датчика не слід плутати з його точністю або точністю (які є двома різними поняттями). Наприклад, тоді як інфрачервоний датчик відстані може давати 4096 різних значень для кодування відстаней від 0 до 10 см, що передбачає роздільну здатність близько 24 мікрометрів, його точність набагато вище (порядку міліметрів) через шум у процесі придбання.
Технічно точність сенсорів задається різницею між (середнім) виходом датчика m та істинним значенням v:
\[accuracy=1-\frac{\left | m-v \right |}{v}\]
Цей захід надає вам величину, яка наближається до одиниці для дуже точних значень і нуля, якщо група вимірювань далеко від фактичного середнього. На практиці, однак, цей захід використовується лише рідко, і точність забезпечується абсолютними значеннями або відсотками, при яких значення може перевищувати справжнє вимірювання.
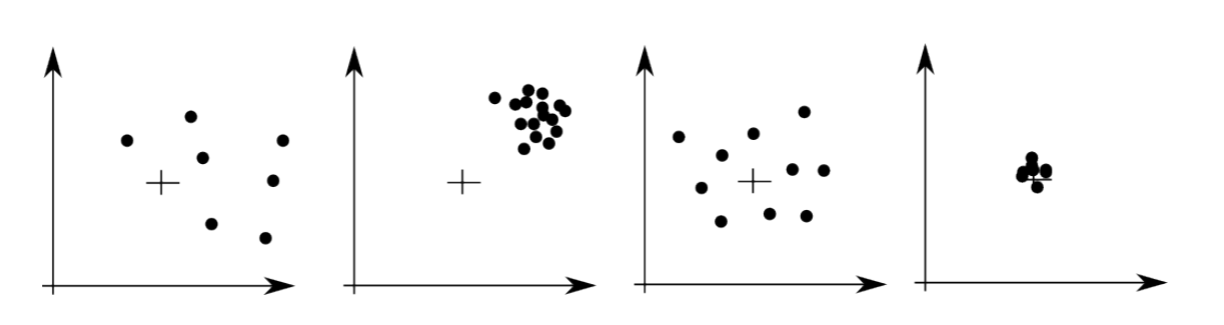
Точність датчика замість цього задається співвідношенням діапазону та статистичної дисперсії сигналу. Тому точність є мірою повторюваності сигналу, тоді як точність описує систематичну помилку, яка вводиться фізикою датчика. Це проілюстровано на малюнку 5.7.1.
Датчик GPS зазвичай точний в межах декількох метрів, але точним лише до десятків метрів. Це стає найбільш очевидним, коли конфігурації супутника змінюються, в результаті чого точний регіон стрибає на пару метрів. На практиці цього можна уникнути, об'єднавши ці дані з іншими датчиками, наприклад, з IMU.
Швидкість, з якою датчик може забезпечувати вимірювання, відома як його пропускна здатність. Наприклад, якщо датчик має пропускну здатність 10 Гц, він буде подавати сигнал десять разів на секунду. Це важливо знати, оскільки частіше запитувати датчик є марною тратою обчислювального часу і потенційно вводить в оману.