5: Зміна висоти - Підйом і керівництво
- Page ID
- 28640

Глава 5. Зміна висоти: Підйом і керівництво
Вступ
За допомогою основних кривих показників потужності та тяги, розглянутих в останньому розділі, ми змогли дослідити прямі та рівні показники польоту літака. Тепер ми повинні додати ще один вимір до нашого дослідження продуктивності, зміни висоти. Ми знаємо, що за прямими та рівними даними ми можемо визначити теоретичну максимальну висоту або стелю для даного літака. Питання, на яке потрібно відповісти зараз, полягає в тому, як ми можемо отримати літак з однієї висоти на іншу? Це обговорення повинно включати дослідження можливих темпів підйому і спуску, відстані над землею, необхідної для підняття заданої висоти і дальності польоту літака при ковзанні. Як швидко я можу дістатися від висоти A до висоти B? Як далеко я можу ковзати після виходу з ладу двигуна? Якщо я зніму 600 футів від кінця злітно-посадкової смуги, чи можу я очистити дерева попереду?
Щоб подивитися на зміни висоти, нам потрібно думати з точки зору енергетичних змін. У підйомі ми перетворюємо кінетичну і внутрішню (моторну) енергію в збільшення потенційної енергії. Під час ковзання ми перетворюємо потенційну енергію в швидкість (кінетичну енергію), яка дасть нам необхідний підйом для польоту.
Одне з питань вище стосувалося швидкості підйому. У скелелазінні літак збільшує свою потенційну енергію. Швидкість підйому тоді передбачає зміну потенційної енергії в даний час. Двигун забезпечує необхідну енергію для підйому, а потужність двигуна за одиницю часу - потужність (робота за одиницю часу). Ми усвідомлюємо, що для прямого і рівного польоту з заданою швидкістю потрібна певна кількість потужності. Щоб піднятися на тій же швидкості, то потрібна додаткова потужність, і кількість цієї додаткової потужності визначатиме швидкість, з якою буде відбуватися підйом. Максимальна швидкість підйому при заданій швидкості буде залежати від різниці між потужністю, доступною від двигуна на цій швидкості, і потужністю, необхідною для прямого і рівного польоту. Це можна визначити з інформації про показники потужності, вивченої в останньому розділі.
Концепція додавання потужності для збільшення висоти (підйому) зазвичай не інтуїтивно зрозуміла. Більшість з нас обумовлені досвідом роботи з автомобілями, човнами та велосипедами, щоб думати про збільшення швидкості як наслідок додавання потужності. Це, звичайно, транспортні засоби, обмежені висотою дороги або водної гладі. Якщо ми думаємо про автомобіль, що їде через пагорб, однак, процес не важко зрозуміти. Якщо автомобіль їде зі швидкістю, скажімо, 55 миль/год (оскільки ніхто з нас не подумає їхати зі швидкістю понад межу!) і ми запускаємо пагорб, тримаючи прискорювач (дросель) стійкий, автомобіль буде сповільнюватися, коли піднімається на пагорб, торгуючи кінетичною енергією для потенційної енергії. Щоб підтримувати наші 55 миль/год (зберігаючи кінетичну енергію постійною), коли ми рухаємось вгору по пагорбу, ми повинні додати потужність. Те ж саме справедливо і в літаку.
Однією з найскладніших речей для льотного інструктора навчити нового пілота є те, що дросель контролює висоту, а контрольна палиця або ярмо контролює швидкість. Це, звичайно, не зовсім вірно, оскільки два елементи управління використовуються одночасно; однак, це аналогія, яка найкраще послужить пілоту у складній ситуації. Наприклад, на підході до посадки пілот намагається провести стійкий спуск у бік злітно-посадкової смуги. Якщо раптовий вниз тяга викликає втрату висоти, пілот повинен негайно вжити заходів, щоб відновити втрачену висоту або ризикувати незапланованою зустріччю з землею недалеко від злітно-посадкової смуги! Відтягування назад на управління, щоб підняти ніс літака вгору є найпоширенішою інстинктивною реакцією, оскільки літак спускається носом вниз. Це, однак, просто збільшить кут атаки і призведе до зниження швидкості, можливо, призведе до зупинки і, звичайно, призведе до подальшої втрати підйому і висоти. Правильна реакція, додаючи потужність, призведе до підйому, щоб відновитися після втрати висоти. Остаточний контроль літака в такій обставині зажадає скоординованого використання обох елементів управління для регулювання як швидкості, так і висоти під час цієї найскладнішої фази польоту.
Пілот у вищезгаданій ситуації не збирається переставати думати про її або його літака потужності наявної або потужності, необхідної кривих продуктивності. Це робота інженера, який проектує літак, щоб мати можливість задовольнити потреби пілота в такій ситуації. Це наша робота в наступних розділах. У цьому дослідженні ми повинні додати кут до нашої попередньої ілюстрації балансу сил на літаку. Це буде кут підйому, θ, який буде вважатися позитивним при підйомі і негативним при ковзанні або спуску.
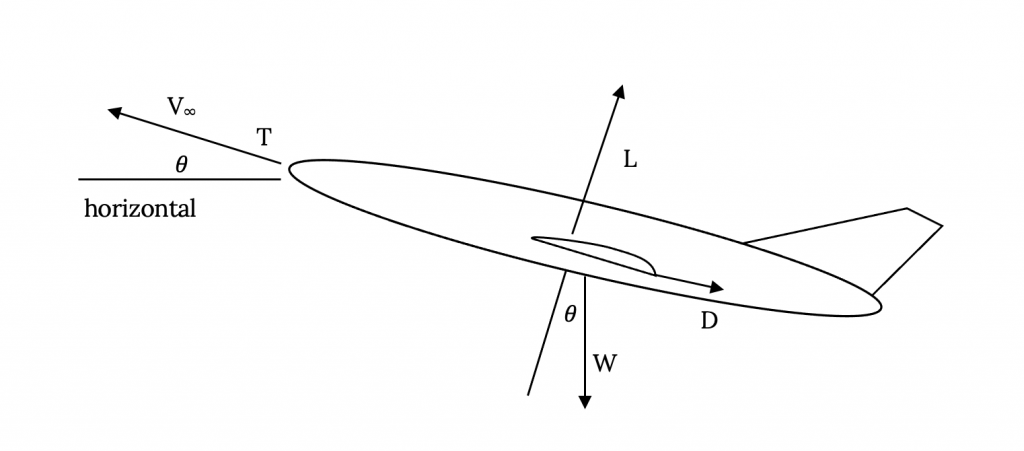
Підсумовуючи зусилля на наведеному вище малюнку по осі тяги знаходимо:

Але це рівняння є статичним співвідношенням, яке не допускає прискорення; тобто не допускає зміни кінетичної енергії. Щоб розглянути всі сили, які можуть бути задіяні в підйомі, ми також повинні розглянути прискорення, тому вищевказане рівняння стає:
")
Якщо переставити це рівняння і розділити на вагу (мг), то отримаємо:
 /Вт = sinθ + (1/г) (дВ/дт)")
Потім, помноживши на швидкість, ми маємо:
 /Ш = Vsinθ + (В/г) (дВ/дТ)")
або
 /W = Vsinθ + (В/г) (дВ/дТ)")
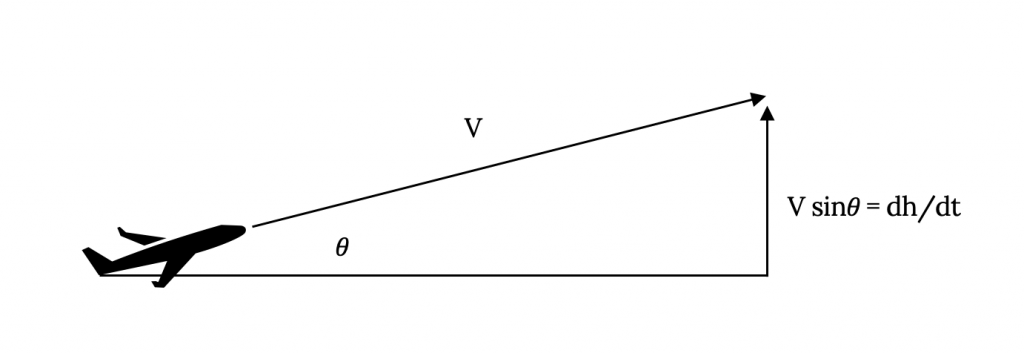
Тепер V sin θ виявляється вертикальною швидкістю або швидкістю підйому, як показано на малюнку 5.2.
Таким чином, ми маємо (P av — P req) /W = dh/dt + (В/г) (дВ/дт).
І, ми можемо змінити це, щоб дати
дх/дт = (Р ав — Р реак) /Вт — (В/г) (дВ/дТ).
Загальноприйнято називати перший член в дужках праворуч у цьому рівнянні як надлишкову потужність. Коли надлишкова потужність ділиться на вагу, як у вищевказаному рівнянні, вона стає питомою надлишковою потужністю, P s.
Р с = (Р ав — Р реак) /Ш.
Тепер, повертаючись до більш ранньої форми рівняння, ми можемо написати
Р с = дх/дт+ (В/г) (дВ/дТ)
Це дуже важливий зв'язок, який говорить нам, що ми можемо використовувати нашу надлишкову силу (владу над і вище, необхідну для прямого і рівного польоту), щоб або піднятися (dh/dt) або змінити нашу швидкість (прискорити або уповільнити) або зробити обидва одночасно. Ми також можемо перетворити швидкість на висоту або висоту у швидкість.
У реальних ситуаціях пілот ініціює підйом як збільшенням дросельної заслінки (додавання потужності двигуна), так і уповільненням, а це означає, що як потужність двигуна, так і кінетична енергія перетворюються на швидкість підйому. При спуску пілот часто зменшить установку потужності літака (дросель), так що не всі зниження потенційної енергії йде на збільшення швидкості, але деякі йдуть в енергію, необхідну для підтримки підйому польоту.
Насправді, скільки посилення можна реалізувати шляхом перетворення кінетичної енергії в потенційну енергію без зміни налаштування потужності двигуна? Ми можемо знайти це досить легко, якщо подивимося безпосередньо на такий обмін.

або
подача
 /2г")
Використовуючи це, ми можемо виявити, що для літака, що летить 200 миль/год і сповільнюючись до 160 миль/год під час початкового підйому, приріст висоти від заміни кінетичної енергії на потенційну енергію доходить до 483 футів. Це досить мало, якщо хтось думає зробити підйом на 5000 футів, але це може бути корисно з точки зору маневрів уникнення надзвичайних ситуацій. З іншого боку, те ж рівняння покаже, що літак, що летить 500 миль/год, може отримати більше 5000 футів на висоті, сповільнюючи до 300 миль/год, і якщо хтось дивиться на надзвуковий швидкісний літак, цей кінетичний для потенційної енергетичної своп стає дуже значним у обліку можливостей підйому та спуску. Зверніть увагу, що маса літака відсутня в рівнянні вище.
У наступному розділі ми повернемося до понять конкретної надлишкової енергії та швидкості торгівлі на висоту або навпаки. Поки що ми розглянемо більш простий випадок неприскореного польоту і припустимо, що всі підйоми і спуски здійснюються з постійною швидкістю і що швидкість зміни висоти є лише функцією використання надлишкової потужності. Це, по суті, припускає, що висота, яку потрібно отримати або втратити, змінивши нашу швидкість польоту, незначна.
Ми почнемо наш «статичний» погляд на зміну висоти, дивлячись на ковзаючий політ з нульовою потужністю.
5.1 Ковзання польоту
Перший випадок, який ми розглянемо, буде простим випадком безсилового спуску, або ковзання. Це дуже важлива ситуація продуктивності для літака, оскільки всі літаки сприйнятливі до виходу з ладу двигуна. Одне з перших речей, яких навчають робити студент-пілот, - це правильно обробляти «двигун з» у своєму літаку; як налаштувати найкращу швидкість, щоб оптимізувати швидкість спуску, щоб дозволити максимальний час, щоб викликати допомогу, перезапустити двигун, підготуватися до аварійної посадки тощо Для деяких літаків звичайно , непотужне ковзання є нормальним. Вітрильники і дельтапланери приходять на думку відразу, але слід також враховувати, що Space Shuttle - це не що інше, як літак з «двигуном» при спуску з орбіти на посадку!
У непотужному ковзанні є тільки три сили, що діють на літак, підйом, перетягування і вага. Ці сили повинні досягти рівноважного стану при ковзанні. Пілот повинен переконатися, що досягнута рівновага є оптимальною для виживання, і в більшості літаків авіаконструктор повинен зробити літак так, щоб він шукав розумне положення рівноваги самостійно. Літак, який затихає і йде в обертання при втраті двигуна не буде дуже популярний серед більшості пілотів! Тепер ми повинні визначити, які ці оптимальні умови.
Використовуючи рисунок 5.1 та використовуючи тягу нуля, ми можемо записати наступні два простих співвідношення балансу сили в напрямках підйому та перетягування:

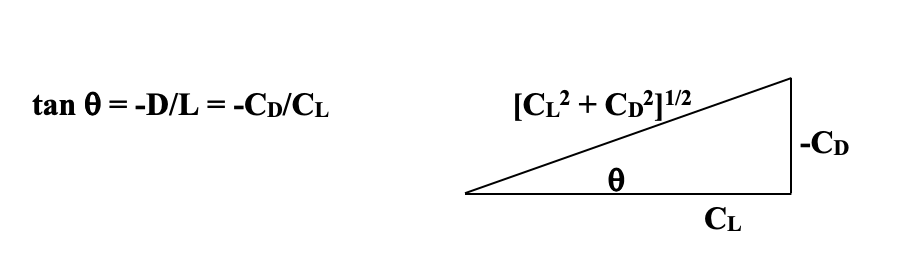
Ділення другого рівняння на перше дає
")
Там цей термін знову, L/D!
Це говорить нам про дуже простий і дуже важливий факт: кут ковзання залежить тільки від співвідношення підйому-перетягування.
Кут ковзання дорівнює:

і
")
Тут щось здається неправильним. Чи означає це, що кут ковзання не має нічого спільного з вагою літака? Це, звичайно, здається, що важкий літак не ковзає, як легкий. Чи буде Boeing 747 ковзати так само, як Cessna 152? А як щодо космічного човника?
Так, рівняння не містить ваги літака, хоча це було в початкових рівняннях балансу сили. Кут ковзання залежить лише від коефіцієнта підйому до перетягування, і це співвідношення залежить від таких параметрів, як C D0, K та e, як обговорювалося в останньому розділі.
Але хіба не той факт, що має бути достатній підйом для підтримки ваги (або принаймні більшої його частини) означає, що вага дійсно є фактором? Не зовсім, оскільки перетягування також розглядається як функція ваги, а у співвідношенні підйому-перетягування вага «ділиться» з відносин. Боїнг 747 дійсно може ковзати, а також Cessna 152.
Отже, які наші турботи при ковзанні? По суті, ми хочемо знати, як далеко може ковзати літак (дальність) і скільки часу знадобиться, щоб досягти землі (витривалість).
5.1.1 Дальність при ковзанні
Ми розглянемо діапазон, припускаючи відсутність будь-якого природного вітру. Це, звичайно, рідко буває в реальному житті, але це найпростіший випадок для нас, щоб розглянути. Ми також припустимо стійке ковзання, що означає, що пілот встановив (або обрізав) літак таким чином, що він буде утримувати обрану вказану швидкість повітря і кут ковзання протягом усього спуску. Геометрія ситуації досить проста, як показано нижче.
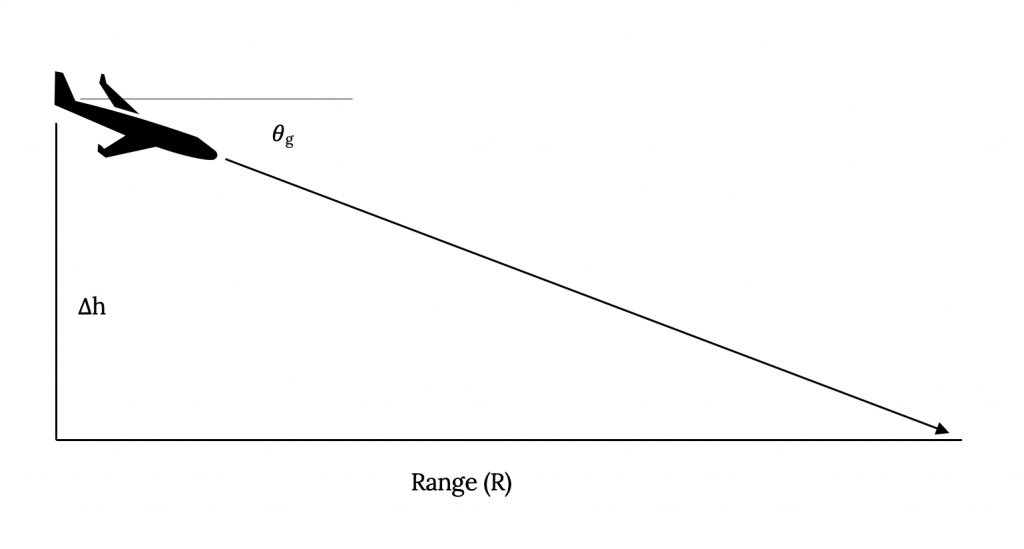
З малюнка видно, що кут ковзання - це дуготангенс зміни висоти, поділеної на діапазон.

Це дає діапазон:
і оскільки тангенс кута ковзання - це просто відношення ліфта до перетягування, яке ми маємо
")
Максимальний діапазон ковзання відбувається при максимальному співвідношенні — до перетягування; тобто при мінімальних умовах перетягування! Ми вже знаємо, як знайти все, що ми можемо захотіти знати про мінімальні умови перетягування, тому ми знаємо, як визначити умови для максимального діапазону в неактивному ковзанні.
Для пілота це означає, що він або вона повинні, при втраті потужності двигуна, обрізати літак, щоб ковзати на вказаній (еквівалент рівня моря) повітряної швидкості для мінімального опору, швидкості, яку інженер вказав у довіднику власника повітряного судна, якщо бажана максимальна дальність. Потім пілот буде літати літаком, щоб утримувати бажану швидкість в ковзанні.
Зазвичай максимальна дальність не є найбажанішою метою в ситуації «двигун-аут». Найкраще рішення, як правило, оптимізувати час до «наземної зустрічі» (сподіваюся, посадка!). Це означає, що йде на мінімальну швидкість спуску, а не максимальну дальність. Це, знову ж таки, одна з тих речей, які не можуть бути інтуїтивно зрозумілими для більшості людей, навіть для пілотів, і є багато випадків, коли літаки розбилися, як пілоти безуспішно намагалися розтягнути свій діапазон після того, як двигун виходить з ладу. Вітер, який не був включений у вищевказані розрахунки, може скоротити діапазон до нуля або може посилити його. Відстані важко судити з повітря. Студентські пілоти навчаються, що в ситуації «двигун з» настав час, який повинен бути оптимізований, а не діапазон. Пілот повинен знати швидкість польоту для мінімальної швидкості спуску, а не для максимальної дальності, щоб обрізати літак для спуску, що дозволить максимально час спробувати перезапустити двигун, підготуватися до аварійної посадки, радіо за допомогою тощо Це означає, що нас цікавить швидкість спуск.
Дивлячись на швидкість спуску трохи складніше, ніж дивитися на дальність. Ми розглянемо два випадки, випадок малого кута ковзання, де ми можемо зробити деякі спрощуючі припущення та загальний або великий кут. Дивлячись на випадок малого кута, ми будемо використовувати звичайне математичне припущення, що косинус кута досить близький до одиниці, що ми можемо наблизити його як один. Звичайна межа цього припущення становить близько 5 градусів, оскільки перевірка на нашому калькуляторі покаже, що cos 5º = 0.99619. Однак наш цікавий кут - це кут ковзання, який, як ми вже знаємо, дорівнює дуговому тангенсу D/L. Ми також хотіли б припустити, що синус цього кута приблизно дорівнює його тангенсу. Через це ми розтягнемо застосовність раціоналізації малого кута, щоб включити кути ковзання приблизно до 15 градусів.
(При п'ятнадцяти градусах косинус 0.9659, тому ми все ще знаходимося в межах 5% до нашої мети косинуса = 1.0. Зазвичай це досить добре в реальному світі. Також тангенс п'ятнадцяти градусів становить 0.2679, тоді як синус 0.2588, що робить наше синус = дотичне припущення хорошим з помилкою менше 4%.)
Корисним результатом припущення малого кута є те, що він дозволить нам далі припустити, що підйом приблизно дорівнює вазі. Так як у нас

і якщо

потім

Це може називатися «квазі-рівневим» польотом. Основна перевага цього припущення полягає в тому, що воно дозволяє нам продовжувати співвідносити швидкість з вагою через
")
хоча політ насправді не прямий і рівний.
Тепер ми хочемо почати дивитися на швидкість зміни висоти, dh/dt або h. це швидкість підйому, коли визначена з точки зору позитивної зміни висоти, як показано на малюнку 5.2.
З малюнка 5.2 бачимо, що швидкість підйому дорівнює швидкості польоту літака, помноженої на синус кута підйому. Звертаючись до наших попередніх рівнянь балансу сили для випадку ковзання (без тяги), ми можемо написати

або

і за допомогою малого кута припущення, що вага приблизно дорівнює підйому, дає

Перехід на форму, яка використовує коефіцієнти сили
")
Тепер використовуйте інше припущення малого кута для швидкості.
] 1/2")
у нас є
] 1/2 [КД/КЛ]")
або нарешті
] 1/2 [CD/CL3/2]")
Зверніть увагу, що це негативна швидкість підйому, оскільки ми дивимося на випадок ковзання або спуску (ми не припускали тяги).
З вищесказаного очевидно, що для мінімальної швидкості спуску для даного літака і висота буде відбуватися, коли C D/C L 3/2 знаходиться на мінімумі. Озираючись назад на наше дослідження потужності в попередньому розділі, ми виявляємо, що це та сама умова, знайдена для мінімальної необхідної потужності.
У огляді ми знайшли умови, необхідні для польоту на непотужному ковзані для двох оптимальних випадків, мінімальної швидкості спуску та максимальної дальності без вітру. Вони виявляються, що відбуваються, коли спадний літак обрізається, щоб утримувати вказану швидкість повітря для мінімальної потужності необхідних умов і для мінімального опору відповідно. Ми знаємо все про обидві ці умови з обговорення попередньої глави.
Ми виявили, що для будь-якого ковзання діапазон без вітру дорівнює
 Δh = (CL/CD) Δh")
а для кутів ковзання п'ятнадцять градусів і менше швидкість спуску дорівнює
Вони можуть бути використані для пошуку дальності та швидкості спуску для будь-якого стану ковзання, де ми знаємо відповідні коефіцієнти підйому та опору (кут атаки) і не обмежуються оптимальними випадками. Крім того, ми знаємо, що для оптимізації дальності нам потрібно літати при мінімальних умовах опору, тоді як для мінімальної швидкості спуску нам потрібно літати в умовах мінімальної необхідної потужності.
Більшість літаків в ковзанні задовольнить п'ятнадцять градусів малого кута припущення, що використовується в вище. Деякі, такі як космічний човник, не будуть. Тому варто зробити резервну копію і коротко розглянути випадок крутих кутів ковзання. Це, звичайно, загальний випадок без припущення малого кута. Ми повинні використовувати рівняння силового балансу, розроблені без наближень. Ці стають

і

Рівняння швидкості не може припускати прямий і рівний політ, і перше з двох вищезазначених рівнянь повинно бути використано для вставки ваги літака в співвідношення.
або

Визначення кута ковзання не змінюється
і ми можемо використовувати це відношення з деякою простою тригонометрії, щоб знайти зв'язок між косинусом ковзання або кута підйому та коефіцієнтами підйому та перетягування.

Рівняння швидкості підйому (швидкості спуску) тепер стає
або
] 1/2 {СД/ [CL2+CD2] 3/4}")
Це відношення, яке визначатиме швидкість спуску для будь-якого кута ковзання. Зазначено, що це рівняння насправді не є більш складним математично, ніж те, що знайдено за допомогою наближення малого кута ковзання. Різниця полягає в тому, що тепер немає кореляції між мінімальною швидкістю спуску і умовою мінімальної необхідної потужності.
5.2 Час спускатися
Використання швидкості спуску і зміни висоти
можна визначити час, необхідний для цього спуску.
дт = дх/(дх/дт)
Якщо швидкість спуску постійна, це може стати.
")
Насправді ми вже показали, що як для загальних, так і для малих кутових випадків швидкість спуску не є постійною, а залежить від висоти, оскільки це функція щільності. Таким чином, повне рівняння буде
 3/4]")
і за допомогою рівнянь для зміни густини в стандартній атмосфері можна вставити щільність як функцію h, щоб отримати загальне рівняння часу спуску. Однак, щоб отримати більш просту картину часу, щоб спуститися завдання, ми будемо вважати, що інкрементний підхід може бути використаний там, де щільність, і, отже, швидкість спуску, можна вважати постійною над досить малими кроками висоти під час спуску. Наприклад, на приріст висоти 1000 футів ми можемо базувати наші розрахунки на щільності (швидкості спуску) на півдорозі між верхньою та нижньою висотою, не вносячи великої помилки. Це можна повторювати поступово, щоб знайти час спуску над більшими змінами висоти. Кілька простих прикладів можуть допомогти проілюструвати цей процес.
ПРИКЛАД 5.1
Вітрильник важить одну тисячу фунтів і має навантаження на крило (W/S) 12,5 фунтів на квадратний фут з опору полярним заданим

Знайдіть час ковзання від 1000 футів до рівня моря при мінімальній швидкості спуску (мінімальна швидкість занурення).
Рішення: Мінімальна швидкість раковини відбувається в умовах мінімальної необхідної потужності

Ми можемо перевірити результуюче відношення підйому-перетягування, щоб визначити, чи дійсні наближення малих кутів
Таким чином, ми можемо знайти швидкість з рівняння «квазірівневого»

і використовуючи щільність для висоти 500 футів, ми маємо

і швидкість спуску стає
даючи час, щоб спуститися 1000 футів

ПРИКЛАД 5.2
Розглянемо спуск одного і того ж вітрильника з набагато більшої висоти. Ми можемо використовувати спуск від 20 000 футів, щоб дослідити неточності використання поступового підходу до проблеми часу спуску. Припустимо, що для того, щоб отримати перше припущення на час, щоб спуститися, ми припустили один приріст, використовуючи щільність на 10000 футів. Спочатку знайдемо швидкість польоту

то швидкість спуску
даючи час для спуску

Ми повинні очікувати підвищення точності, якщо ми використовуємо чотири кроки 5000 футів кожен, обчислюючи швидкості і швидкості спуску на 17 500; 12500; 7500; і 2500 футів висоти, як показано в наступній таблиці.
Таблиця 5.1: Приклад 2
| ч (фути) | h (середнє) (фут) | σ | V (кадрів в секунду) | ДХ/ДТ = VSINθ (кадрів в секунду) |
|---|---|---|---|---|
| 20 000-15 000 | 17 500 | 0.5793 | 124.49 | 4.258 |
| 15 000-10 000 | 12 500 | 0.6820 | 114.74 | 3.924 |
| 10 000-5,000 | 7 500 | 0.7982 | 106.05 | 33.627 |
| РІВЕНЬ 5,000-МОРЯ | 2,500 | 0,9288 | 98.32 | 3.363 |
В сЛ = 94,752 ф |
||||
Загальний час спуску знаходять шляхом підсумовування додаткових разів від кожного з 5000 футових спусків.
 20−15+ (Δhh) 15−10+ (Δhh) 10−5+ (Δhh) 5−0")
даючи т = 5313,8 сек = 88,6 хв
Це дає час, щоб спуститися з 20,000 футів 88.6 хвилин, різниця тільки 0.2 хвилин або 10.8 секунд від брутто, одного приросту рішення.
Чи показує вище, що є мало сенсу розбивати ковзання на кроки, щоб знайти час спуску, або просто що вибрані прирости були занадто великими, щоб зробити велику різницю? Розв'язок «точного» інтегрального рівняння для спуску на 20 000 футів призведе до часу спуску 5426.5 секунди або 90,4 хвилини. Існує лише двохвилинна різниця між «точним» рішенням та найгіршим можливим наближенням; помилка 2%!
5.3 Скелелазіння польоту
Як обговорювалося раніше, додавання потужності вище необхідної для прямого і рівного польоту на заданій швидкості зробить можливим або збільшення висоти, або зміна швидкості або і те, і інше. Якщо швидкість тримається постійною, а потужність (або тяга) додається, результатом буде підйом. Оскільки підйом найкраще розглядати як збільшення потенційної енергії, ми можемо найкраще проаналізувати його на основі використання енергії, що відображається в потужності або додаванні енергії за одиницю часу. Щоб почати наш погляд на сходження, ми можемо повернутися до використовуваної раніше фігури і знову написати рівняння балансу сили в напрямках підйому і перетягування, на цей раз додаючи вектор тяги.


Слід підкреслити, що ми припускаємо, що підйом відбувається з постійною швидкістю. Це означає фізично, що підйом - це прямий обмін енергією від двигуна для посилення потенційної енергії. Це також означає, що наші рівняння балансу сили дорівнюють нулю; тобто є статичними рівняннями без прискорення. Однак ми не будемо занадто обмежувати себе. Як і кожен хороший інженер, ми трохи вигадаємо, сказавши, що ми літаємо в «квазістійких: умовах і терпимо дуже малі прискорення, які неминучі в реальному польоті.
Швидкість підняття співвідношення все ще
З балансу сили тяги/перетягування вище ми можемо записати кут підйому
 /Вт")
Швидкість підйому тоді
 V = PAV−попередній")
Відзначимо з вищесказаного, що кут підйому залежить від величини надлишкової тяги, тоді як швидкість підйому залежить від величини надлишкової потужності. Не дивно, що це той самий вид залежності ми знайшли в ковзанні випадку, крім там ми говорили про перетягнути замість тяги.
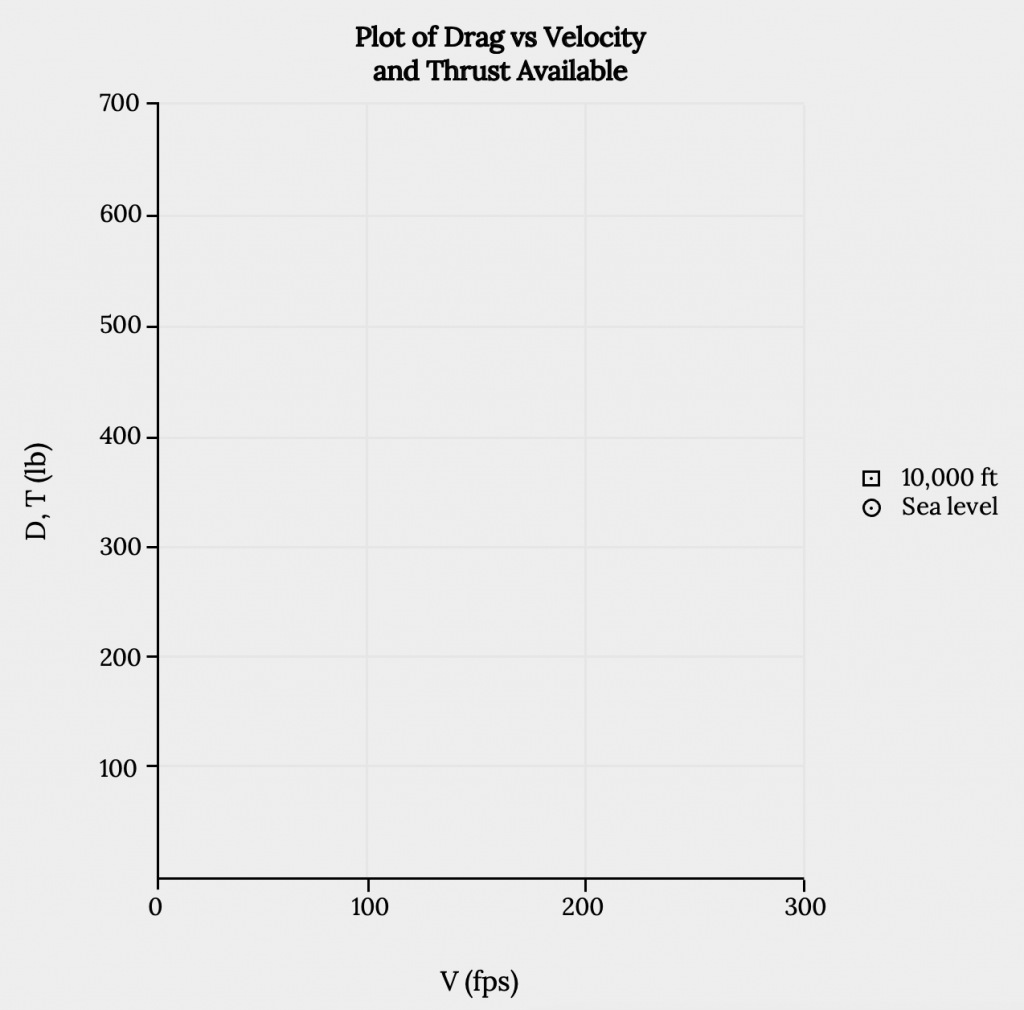
Оскільки кут підйому та швидкість підйому можуть бути безпосередньо пов'язані з раніше обговорюваними кривими продуктивності літака, ми можемо поглянути на ці параметри, оскільки вони стосуються цих графіків. Типовий сюжет тяги і опору (тяга обов'язкова) показаний нижче. При будь-якій заданій швидкості різниця між кривими тяги та опору може бути розділена на вагу літака, щоб визначити максимально можливий кут підйому при цій швидкості, використовуючи співвідношення, визначене раніше. Звичайно, при будь-якій заданій швидкості не всю надлишкову наявну тягу потрібно використовувати для підйому, якщо бажаний менший кут підйому. Коли криві тяги та перетягування рухаються разом вліво і вправо, можливий кут підйому звужується до нуля при швидкостях, де тяга дорівнює опору.
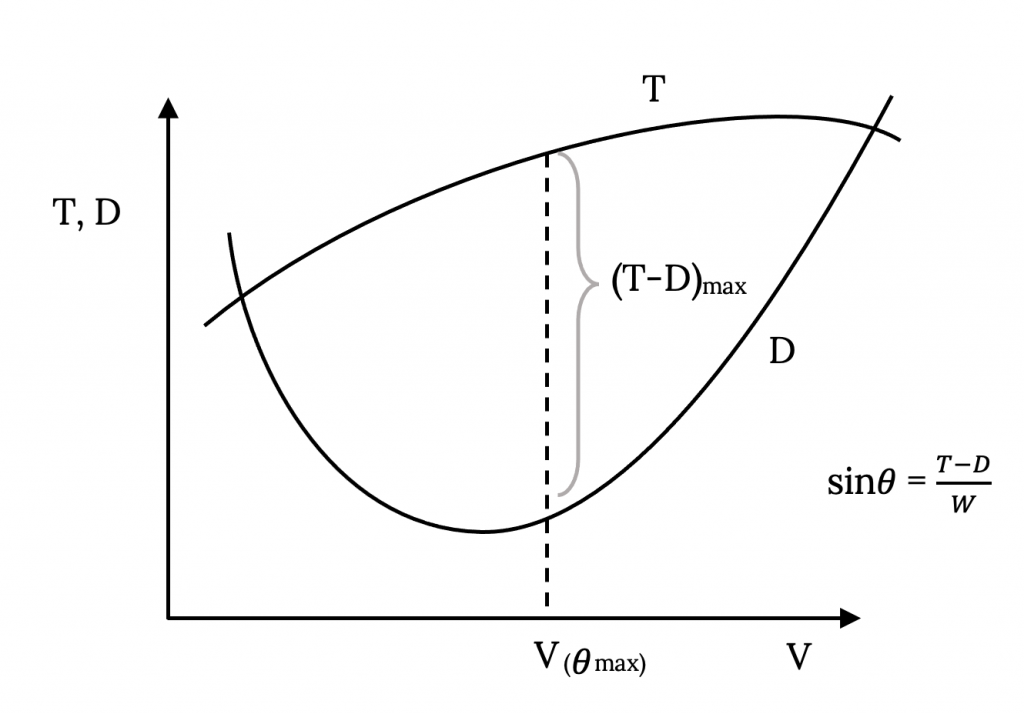
Швидкість, де відбувається максимально можливий кут підйому, - це та, для якої вертикальна відстань між кривими тяги і опору максимальне. Це можна знайти з фактичного графіка даних, просто використовуючи лінійку або пару дільників, щоб знайти цей максимум. Це також можна знайти аналітично, якщо функціональні зв'язки відомі для кривих тяги та перетягування, взявши похідну різниці в тязі та опорі щодо швидкості та встановивши рівну нулю для визначення максимуму.
5.3.1 Випадок, коли тяга постійна
Простий випадок виникає, коли можна припустити, що тяга, наявна від двигуна, є постійною, припущення часто робиться для реактивних двигунів. Якщо тяга постійна, то максимальна різниця між тягою і тягою і, отже, максимальним кутом підйому, повинна відбуватися при мінімальному опорі. Знову мінімальні умови опору стають оптимальними для параметра продуктивності. Також повинно бути очевидним, що коли тяга не є постійною, мінімальний опір, ймовірно, не є умовою, необхідною для максимального кута підйому.
Читач повинен зауважити, що у вищесказаному не було зроблено посилання на параболічний опір полярний, і висновки, зроблені не обмежуються таким випадком. У випадку параболічного опору полярного ми знаємо, як визначити коефіцієнти підйому та опору та швидкість мінімального опору з нашого попереднього дослідження.
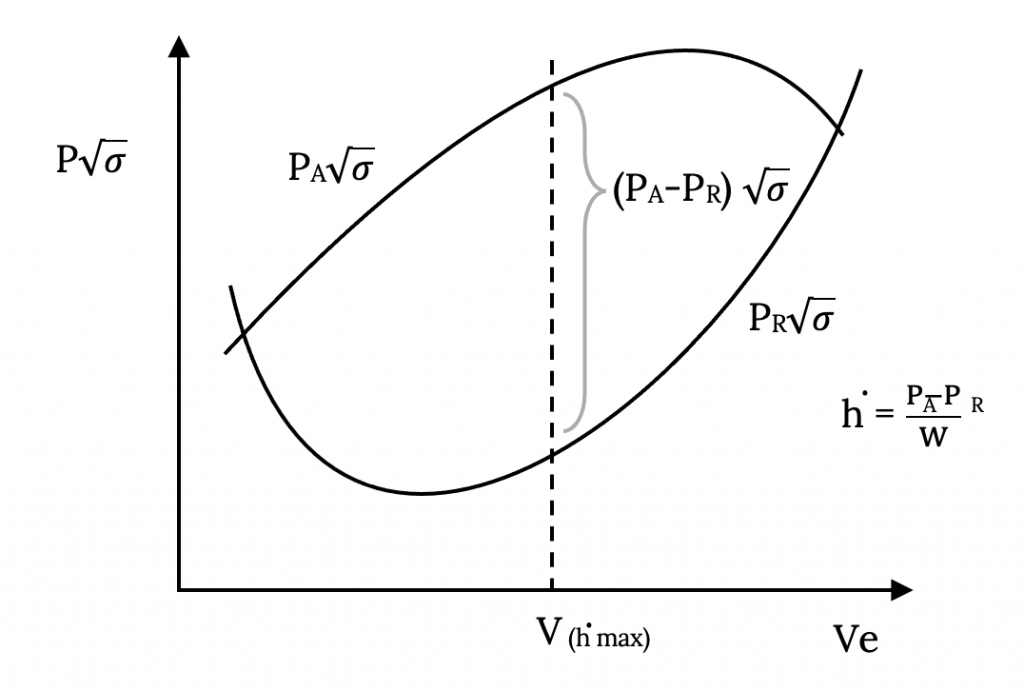
Типовий графік потужності проти швидкості показаний нижче. Зверху ми знаємо, що швидкість підйому дорівнює різниці в доступній потужності і необхідної, при заданій швидкості, розділеної на вагу літака. Таким чином, наявна потужність/потужність необхідної графіка може бути використана для графічного визначення швидкості підйому на будь-якій швидкості таким же чином, як криві тяги були використані вище. У випадках, коли наявна потужність вважається постійною, як це часто буває в простому поданні повітряного судна, що працює на гвинті, максимальна швидкість підйому буде відбуватися зі швидкістю, де необхідна потужність є мінімальною. Ми знаємо з попереднього розділу, як визначити умови мінімальної необхідної потужності. Якщо доступна потужність не є постійною, максимальна швидкість підйому не обов'язково відбуватиметься на швидкості для мінімальної необхідної потужності.
Зверніть увагу, що графік, показаний нижче, відображає P√σ проти Ve, оскільки це дозволяє потужності необхідних даних на всіх висотах згорнути до однієї кривої, як це виведено в главі 4.
Також слід зазначити, що максимальна швидкість підйому і максимальний кут підйому не відбуваються при однаковій швидкості.
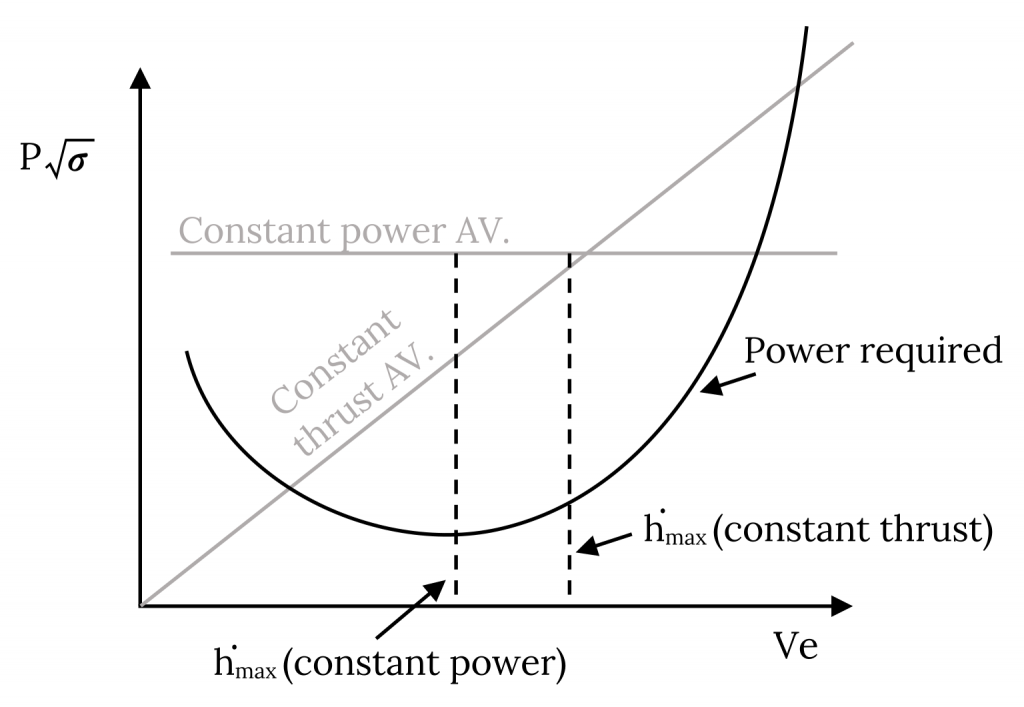
Цікаво порівняти криві продуктивності потужності, а отже, і швидкість підйому, для двох простих моделей, які ми вибрали для реактивних та опорних літаків. У сюжеті, який випливає, опорний літак передбачається мати постійну потужність, а струмінь мати постійну тягу. Оскільки доступна потужність дорівнює тязі, помноженій на швидкість, наявні дані про потужність струменя лежать в діагональній лінії, починаючи від початку. Необхідна крива потужності передбачає загальний літальний апарат. Іншими словами, це порівняння одного і того ж літака з двома різними типами двигунів. Очевидно, що на більш низьких швидкостях швидкість підйому для опори перевищує ту, що для струменя, тоді як на більш високих швидкостях струмінь може обходити опору. Це порівняння, хоча і вигадане, характерно для відмінностей між подібними реактивними і опорними літаками. Це показує одну причину, чому не можна було б розробити струменевий пилосос, оскільки такий літак потребує високої швидкості підйому на дуже низьких швидкостях.
5.3.1.1 Особливий випадок: Постійна тяга
У випадку, згаданому вище як проста модель для реактивного літака, знайти максимальний кут підйому легко, оскільки він повинен відбуватися зі швидкістю для мінімального опору або максимального відношення підйому-перетягування. Умови для максимальної швидкості підйому не такі прості. Дивлячись на швидкість підйому знову згадуємо

і припускаючи квазірівневий політ, ми можемо написати

Таким чином, у нас є зв'язок, який має коефіцієнт підйому як змінну.
Знову піднімається припущення квазі-рівня, яке передбачає, що підйом по суті дорівнює вазі

Тепер у нас є відношення, яке включає в себе як коефіцієнти підйому, так і перетягування як змінні.
Однак ми знаємо, що коефіцієнт опору залежить від коефіцієнта підйому в полярному опорі.
Це дає
 1/2 ТКЛ −1/2/В−КД/CL3/2")
або
 1/2 {(ТКЛ−1/2/Вт) − (CD0+ККЛ2) /CL3/2}")
Вищевказане рівняння призначене для випадку постійної тяги і показує швидкість підйому як функцію лише однієї змінної, коефіцієнта підйому. Для визначення оптимальної швидкості підйому тоді необхідно взяти похідну цього рівняння щодо коефіцієнта підйому. У похідну потрібно включати тільки терміни в дужках, оскільки вона буде встановлена рівною нулю.
Це дає

який можна вирішити за допомогою квадратного рівняння, щоб знайти значення коефіцієнта підйому, який дасть найвищу швидкість підйому для цього особливого випадку постійної тяги.
 2+12СД0К2К, Т = КОНСТ")
ПРИКЛАД 5.3
Даний літак має C D0 = 0,013, K = 0,157, W = 35000 фунтів, S = 530 квадратних футів, T/W = 0,429 і тяга постійна зі швидкістю. Знайдіть найкращу швидкість підйому і пов'язаний з ним кут підйому.
Перш ніж розпочати наше рішення, ми повинні переконатися, що ми розуміємо, про що запитують. Відзначимо, що кращого кута підйому не було запропоновано. Кут підйому шукав був те, що для найкращої швидкості підйому випадку. Студенти іноді припускають, що відповідь шукається завжди для якогось оптимального випадку.
Щоб знайти максимальну швидкість підйому, ми використовуємо співвідношення, знайдене вище, для вирішення коефіцієнта підйому.
 2+12 (0,013) (0,157) 2 (0,151) = 0,088")
Потім це може бути використано для пошуку пов'язаної швидкості польоту для максимальної швидкості підйому.

Кут підйому для максимальної швидкості підйому (не максимальний кут підйому) можна знайти наступним чином:

Нарешті, вони використовуються разом, щоб знайти швидкість підйому.
 = 212,4 кадрів в секунду = 12,743 футів/хв")
Примітка: одиниці футів в хвилину є традиційними.
Тепер давайте подивимося на інший оптимальний, що максимальний кут підйому для цього ж літака. Максимальний кут підйому відбувається за умов мінімального опору або максимального L/D.
Потім ми можемо знайти коефіцієнт підйому, пов'язаний з максимальним кутом підйому та швидкістю повітря, при якій це відбувається.

Нарешті, швидкість підйому для максимального кута підйому

Давайте подивимося на відповіді вище і переконаємося, що вони логічні.
- Максимальна швидкість підйому повинна бути вище, ніж швидкість підйому для максимального кута підйому. Це правда?
- Кут підйому для випадку максимальної швидкості підйому повинен бути менше максимального кута підйому. Це правда?
- Максимальний кут підйому повинен відбуватися при меншій швидкості повітря, ніж при максимальній швидкості підйому. Це так?
У всіх випадках перераховані вище питання задовольняються. Ось деякі питання, які студент повинен задати при перегляді рішень проблеми. Часто задаючи такі питання, можна виявити помилки, які в іншому випадку можуть бути проігноровані.
Одна ситуація, в якій всіх пілотів цікавить як швидкість підйому, так і кут підйому, знаходиться на зльоті. При звичайному зльоті пілот хоче спочатку піднятися зі швидкістю, яка дасть максимальну швидкість підйому. Це дозволить літаку набрати висоту за максимально короткий час, важливу мету як запобіжний захід від двигуна або інших проблем при зльоті. Якщо двигун виходить з ладу під час зльоту, бажана максимальна висота, щоб дати час відновитися і здійснити аварійну посадку. Є, однак, деякі ситуації, в яких це в інтересах пілота, щоб відмовитися від найкращої швидкості підйому і піти на кращий кут підйому. Очевидний випадок, коли літак повинен очистити перешкоду в кінці злітно-посадкової смуги, таку як дерево або вежа. Малюнок нижче ілюструє обидва випадки.
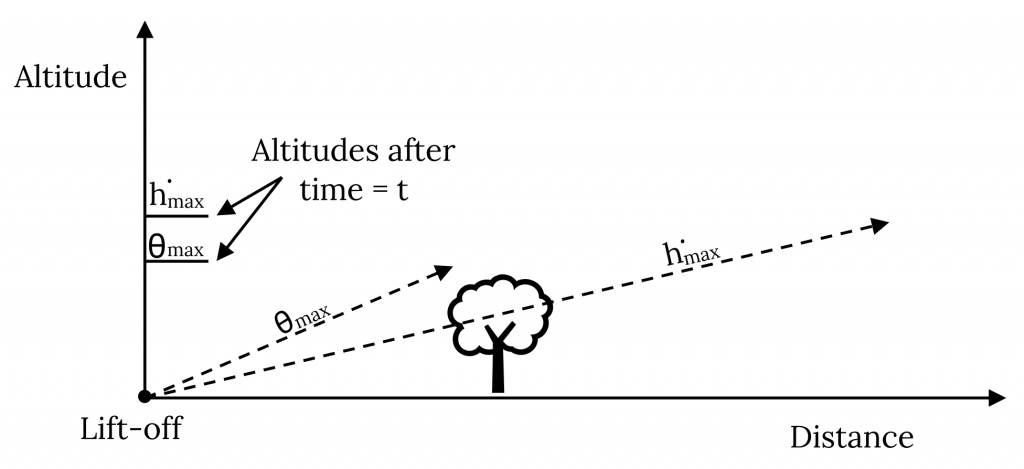
Літак, який летів з максимальною швидкістю підйому, досяг би бажаної висоти швидше, ніж літак, який летів під максимальним кутом підйому, якби це чортове дерево не було на шляху!
5.4 Час піднятися
Щоб знайти час, щоб піднятися з однієї висоти на іншу, ми повинні інтегруватися протягом диференціала часу.

Щоб інтегрувати цей вираз, ми повинні знати, як V sin θ змінюється як функція висоти. Зазвичай нас цікавить мінімальний час, щоб піднятися як обмежувальний випадок. Це буде, звичайно, відбуватися на швидкості для максимальної швидкості підйому. Ця швидкість буде функцією висоти.
Якщо ми зможемо знайти швидкість підйому на кожній висоті, ми можемо побудувати швидкість підйому проти висоти, як показано нижче. Площа під кривою між двома бажаними висотами представляє час, щоб піднятися між цими двома висотами.
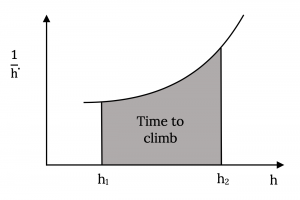
Будь-який з перерахованих вище способів може бути використаний, щоб знайти час для підйому. Насправді вони однакові. Аналітичний метод може бути не таким простим, як здається спочатку, оскільки рівняння повинні враховувати зміну швидкості та кута підйому з висотою, що вимагає включення стандартних рівнянь щільності висоти в інтеграл. Рівняння можуть бути спрощені за допомогою припущення про постійну швидкість підйому або постійний кут підйому.
5.5 Зміна потужності з висотою
Раніше ми розглядали зміну потужності, необхідної (для подолання опору) з висотою та тим, як криві, необхідні потужності, можуть бути об'єднані в одну шляхом побудови потужності, помноженої на квадратний корінь коефіцієнта щільності. Доступну потужність також потрібно помножити на квадратний корінь коефіцієнта щільності, який буде включений на тій же ділянці продуктивності. На додаток до цього ми повинні знати про те, як наявна потужність насправді змінюється залежно від висоти.
Як для реактивних двигунів (турбореактивних, вентиляторно-реактивних і турбогвинтових), так і для поршневих двигунів потужність, вироблена двигуном, падає пропорційно зменшенню щільності при збільшеній висоті.

Для поршневого двигуна з турбонаддувом турбокомпресор призначений для підтримки умов впуску на рівні моря до певної проектної висоти. Проста модель зміни потужності з висотою для турбованого двигуна матиме постійну потужність при значенні рівня моря приблизно до 20 000 футів і падіння прямо пропорційно зменшенню щільності на більшій висоті.
![PAV= [КОНСТА] SL20,000](https://eng.libretexts.org/@api/deki/files/49320/5da550111b1018f4dd7ee93046b76f8f.png "PAV= [КОНСТА] SL20,000")
 20K = P20K ρ Alt ρ20K» назва =» рН> 20К = P20K ρAlt ρ20K» клас =» математика мл математика» >
20K = P20K ρ Alt ρ20K» назва =» рН> 20К = P20K ρAlt ρ20K» клас =» математика мл математика» >
Більш складні ситуації можливі з декількома ступенями турбонаддува.
Слід пам'ятати, що при побудові даних про потужність порівняно з еквівалентною швидкістю рівня моря, ми повинні враховувати реальну зміну потужності, доступну, як тільки що обговорювалося, і помножити цей результат на квадратний корінь коефіцієнта щільності, щоб зробити криві доступної потужності сумісними. з необхідною потужністю кривих. Це не зайве. Перша зміна зроблена для обліку реальних ефектів висоти, а друга - для побудови схеми, необхідної для згортання всіх необхідних даних потужності до однієї кривої.
5.6 Висоти стель
У попередньому обговоренні ми говорили про висоту стелі як про ту, на яку підйом більше не можна було. Це буде висота, де крива доступної потужності просто торкається кривої необхідної потужності, вказуючи на те, що літак може літати прямо і рівнятися лише з однією швидкістю на цій висоті. Тут максимальна швидкість підйому дорівнює нулю. Визначаємо цю висоту як абсолютну стелю. Це визначення, однак, дещо вводить в оману.
Теоретично, виходячи з нашого попереднього дослідження, для досягнення висоти стелі знадобиться нескінченна кількість часу. Можна було б подивитися на швидкість підйому можливо для літака, який, скажімо, на 500 футів нижче його абсолютної стелі. Було б знайдено дуже низьку швидкість підйому, що призводить до дуже великої кількості часу, необхідного для підняття останніх 500 футів, щоб досягти абсолютної стелі. Через це ми визначаємо більш практичний стелю під назвою службова стеля. Визначення службового стелі грунтується на швидкості підйому; тобто, на якій висоті максимальна швидкість підйому настільки низька, щоб зробити подальший підйом недоцільним. Це відрізняється для реактивних і поршневих літаків. Для поршневого літака службова стеля - це висота, на якій швидкість підйому становить 100 футів в хвилину (або 0,5 метра в секунду). Для реактивних літаків службова стеля - це висота, на якій швидкість підйому становить 500 футів в хвилину (або 2,5 метра в секунду).
Слід зазначити, що багато винищувачів і високопродуктивні літаки можуть, в реальності, бути в змозі перевищити навіть свій абсолютний стелю завдяки використанню підходів енергоменеджменту. Літак може піднятися до своєї службової стелі, наприклад, а потім піти в занурення, нарощуючи надлишкову кінетичну енергію, а потім відновити підйом, використовуючи як надлишкову потужність, так і надлишкову кінетичну енергію, щоб піднятися на висоти вище, ніж це знайдено як «абсолютний». Також на дуже великій висоті може знадобитися включити орбітальну динаміку до розгляду можливостей підйому і стелі.
Домашнє завдання 5
1. Літак важить 3000 фунтів і має 175 футів 2 площа крила, співвідношення сторін 7, і коефіцієнт ефективності Освальда, е, 0.95. Якщо C D0 дорівнює 0,028, графік перетягування в порівнянні зі швидкістю для рівня моря і 10000 футів висоти, будуючи перетягування з інтервалом 20 кадрів в секунду. Також обчисліть значення мінімального опору і швидкості для мінімального опору на обох висотах і порівняйте їх з результатами на графіку. Використовуйте графічний папір, наданий; не будуйте графіки за допомогою комп'ютера.
2. Використовуючи значення тяги рівня моря 400 фунтів і припускаючи, що тяга постійна зі швидкістю, але змінюється залежно від щільності (висоти), обчисліть максимальну та мінімальну справжню швидкість польоту на рівні моря та на висоті 10 000 футів та підтвердіть ці відповіді графічно.
Посилання
Малюнок 5.1: Родинний сірий (2021). «Сили в підйомі». CC ПО 4.0. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.1_20210805
Малюнок 5.2: Родинний сірий (2021). «Швидкість/Швидкість кутового зв'язку підйому». CC ПО 4.0. Літак Баю Арді з проекту Іменник. Публічне надбання. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.2_20210805
Малюнок 5.3: Родинний сірий (2021). «Дальність в ковзанні». CC ПО 4.0. Літак Баю Арді з проекту Іменник. Публічне надбання. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.3_20210805
Малюнок 5.4: Джеймс Федорович Марчман (2004). «Розкладання коефіцієнтів підйому і перетягування». CC ПО 4.0.
Малюнок 5.5: Родинний сірий (2021). «Вплив тяги і перетягування на підйом». CC ПО 4.0. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.5-new
Малюнок 5.6: Родинний сірий (2021). «Можливість піднятися на графіках потужності». CC ПО 4.0. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.6-new
Малюнок 5.7: Родинний сірий (2021). «Порівняння наявних випадків постійної потужності та постійної тяги». CC ПО 4.0. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.7_20210805
Малюнок 5.8: Родинний сірий (2021). «Підніміться на Максима на зліт». CC ПО 4.0. Дерево Річарда з проекту «Іменник». Публічне надбання. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.8_20210805
Малюнок 5.9: Родинний сірий (2021). «Інтеграція, щоб отримати час, щоб піднятися». CC ПО 4.0. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/5.9_20210805
Малюнок 5.10: Родинний сірий (2021). «Сюжет перетягування проти швидкості та тяги.» CC ПО 4.0. Адаптовано з Джеймса Федоровича Марчмана (2004). CC ПО 4.0. Доступно з https://archive.org/details/hw-5_20210805
<! — pb_fixme —><! — pb_fixme —>