15.3: Підготовка
- Page ID
- 75938

Співвідношення швидкості тіла (або\( \nu\) частки, або системи відліку) часто задається символом\( \beta\):
\[ \beta=\frac{\nu}{c}. \label{15.3.1} \]
З причин, які стануть очевидними (сподіваюся!) пізніше діапазон зазвичай обмежується між 0 і 1.\( \beta\) У нашому дослідженні спеціальної теорії відносності ми виявимо, що нам доводиться часто використовувати ряд функцій\( \beta\). Найпоширенішими з них є:
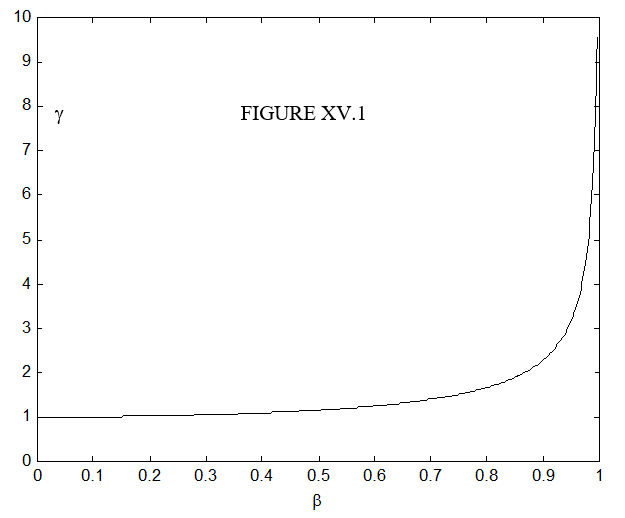
\[ \gamma=(1-\beta^{2})^{-\frac{1}{2}}, \label{15.3.2} \]
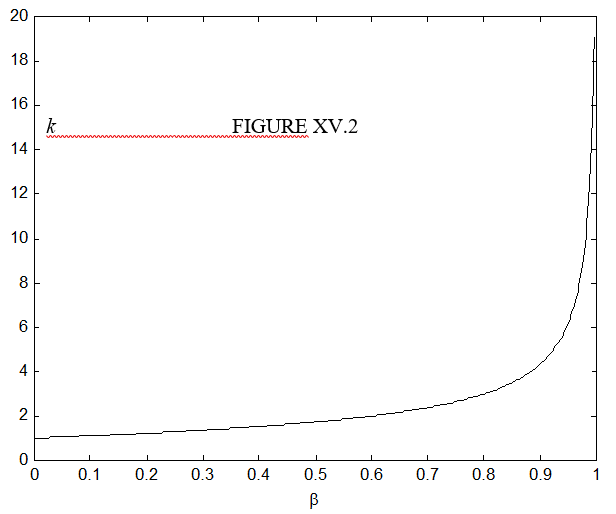
\[ k=\sqrt{\frac{(1+\beta)}{(1-\beta)}}, \label{15.3.3} \]
\[ z=k-1, \label{15.3.4} \]
\[ \theta=\cos^{-1}\gamma=\sin^{-1}(i\beta\gamma). \label{15.3.7} \]
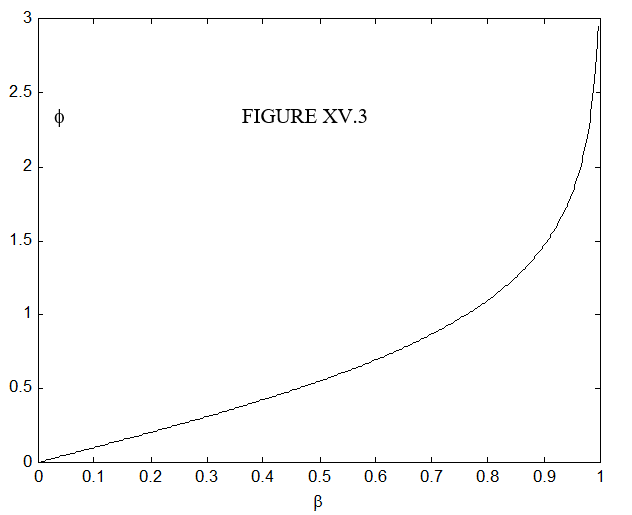
На малюнках XV.1-3 я малюю\( \gamma, k\) і\( \phi\) як функції\( \beta\). \( \gamma\)Функції\( k\) переходять від 1 до ∞, оскільки b переходить від 0 до 1;\( z,K\) і\( \phi\) переходять від 0 до ∞. \( \theta\)Функція уявна.
Багато - можна навіть сказати більшість - проблем у спеціальній теорії відносності (включаючи екзаменаційні та домашні запитання!) сума, при позбавленні їх дієслівності, до наступного:
«З огляду на одну з величин\( \beta,\gamma,k,z,K,\phi,\theta\), обчислити одну з інших».
Таким чином, я б припустив, що, ще до того, як ви маєте уявлення про те, що ці величини означають, ви можете написати програму для вашого комп'ютера (або програмований калькулятор) таким чином, що, коли ви вводите будь-який з реальних величин, комп'ютер миттєво поверне всі шість з них. Це позбавить вас у майбутніх випадках від необхідності запам'ятовувати точні формули або турбуватися про нудну арифметику, щоб ви могли сконцентрувати свій розум на розумінні відносності.
Просто для подальшого використання, Я табулювати тут відносини між цими різними величинами. Це передбачало деяку алгебру та набір тексту; Я не думаю, що є якісь помилки, але я сподіваюся, що якийсь читач може ретельно перевірити їх і дасть мені знати (jtatum@ uvic.ca), якщо він чи вона знайде їх.
\( \beta = \sqrt{1-\frac{1}{\gamma^{2}}}=\frac{k^{2}-1}{k^{2}+1}=\frac{z(z+2)}{(z+1)^{2}+1}=\frac{\sqrt{K(K+2)}}{K+1}=\tanh\phi\)або\( \frac{e^{2\phi}-1}{e^{2\phi}+1}=-i\tan\theta\)
\( \gamma=\frac{1}{\sqrt{1-\beta^{2}}}=\frac{k^{2}+1}{2k}=\frac{(z+1)^{2}+1}{2(z+1)}=K+1=\cosh\phi\)або\( \frac{1}{2}(e^{\phi}+e^{-\phi})=\cos\theta\)
\( k=\sqrt{\frac{1+\beta}{1-\beta}}=\gamma+\sqrt{\gamma^{2}-1}=z+1=K+1+\sqrt{K(K+2)}=e^{\phi}=e^{-i\theta}\)
\( z=\sqrt{\frac{1+\beta}{1-\beta}}-1=\gamma-1+\sqrt{\gamma^{2}-1}=k-1=K+\sqrt{K(K+2)}=e^{\phi}-1=e^{-i\theta}-1\)
\( K=\frac{1}{\sqrt{1-\beta^{2}}}-1=\gamma-1=\frac{(k-1)^{2}}{2k}=\frac{z^{2}}{2(z+1)}=\frac{(e^{\phi}-1)^{2}}{2e^{\phi}}=\cos\theta-1\)
\( \phi=\tanh^{-1}\beta\)або\( \frac{1}{2}\ln\left(\frac{1+\beta}{1-\beta}\right)=\cosh^{-1}\gamma\) або\( \ln(\gamma+\sqrt{\gamma^{2}-1})=\ln k=\ln(z+1)=\ln\left(K+1+\sqrt{K(K+2)}\right)=-i\theta\)
\( \theta=\frac{i}{2}\ln\left(\frac{1+\beta}{1-\beta}\right)=i\ln(\gamma+\sqrt{\gamma^{2}-1})=i\ln k=i\ln(z+1)=i\ln\left[K+1+\sqrt{K(K+2)}\right]=i\phi\)