5: Геодезія та GPS
- Page ID
- 36847

Геодезія та GPS
Девід ДіБіаз
5.1. Огляд
Як ви пам'ятаєте з розділу 1, географічні дані представляють просторові місця розташування та непросторові атрибути, виміряні в певний час. Ми визначили «feature» як набір позицій, що визначає місцезнаходження та ступінь сутності. Позиції, таким чином, є основним елементом географічних даних. Як і букви, що складають ці слова, позиції є будівельними блоками, з яких будуються особливості. Межа властивості, наприклад, складається з набору позицій, з'єднаних відрізками лінії.
Теоретично єдине положення - це «0-мірна» ознака: нескінченно мала точка, з якої утворюються 1-мірні, 2-вимірні і 3-вимірні ознаки (лінії, площі, обсяги). На практиці позиції займають 2- або 3-вимірні площі в результаті обмеженого дозволу вимірювальних технологій і обмеженої точності координат розташування. Роздільна здатність і точність - два аспекти якості даних. У цій главі досліджуються технології та процедури, що використовуються для отримання позиційних даних, а також фактори, що визначають їх якість.
Цілі
Студенти, які успішно завершили главу 5, повинні мати можливість:
- Визначити та визначити ключові аспекти якості даних, включаючи роздільну здатність, точність та точність;
- Перелічити та пояснити процедури, які землевпорядники використовують для отримання позиційних даних, включаючи обхід, тріангуляцію та трилатерацію;
- Обчислити координати площини по відкритій траверсі;
- Розрахувати висотні відмітки шляхом вирівнювання;
- Пояснити, як радіосигнали, що транслюються супутниками Global Positioning System, використовуються для розрахунку позицій на поверхні Землі;
- Вкажіть види та величину помилок, пов'язаних з невиправленим позиціонуванням GPS; і
- Визначте та поясніть методи, що використовуються для підвищення точності позиціонування GPS.
Коментарі та запитання
Зареєстровані студенти можуть залишати коментарі, запитання та відповіді на запитання щодо тексту. Особливо вітаються анекдоти, які пов'язують текст глави з вашим особистим або професійним досвідом. Крім того, в системі управління курсами ANGEL доступні дискусійні форуми для коментарів і питань на теми, якими ви, можливо, не захочете ділитися з усім світом.
Щоб залишити коментар, прокрутіть вниз до текстового поля під «Опублікувати новий коментар» і почніть вводити текст у текстовому полі, або ви можете відповісти на існуючу гілку. Коли ви закінчите вводити текст, натисніть кнопку «Попередній перегляд» або «Зберегти» (Зберегти фактично надішле ваш коментар). Після того, як ваш коментар буде опублікований, ви зможете редагувати або видаляти його за потребою. Крім того, ви зможете відповісти на інші публікації в будь-який час.
Примітка: перші кілька слів кожного коментаря стають його «заголовком» у гілці.
5.2. Контрольний список
Наступний контрольний список призначений для студентів штату Пенн, які зареєстровані для класів, в яких цей текст, і пов'язані вікторини та проекти в системі управління курсами ANGEL були призначені. Можливо, вам буде корисно спочатку роздрукувати цю сторінку, щоб ви могли слідувати інструкціям.
| Крок | Діяльність | Доступ/Напрямки |
|---|---|---|
| 1 | Читати главу 5 | Це друга сторінка глави. Натисніть на посилання внизу сторінки, щоб продовжити або повернутися до попередньої сторінки, або перейти до верхньої частини глави. Ви також можете переміщатися по тексту за посиланнями в меню GEOG 482 зліва. |
| 2 | Надішліть п'ять практичних вікторин, включаючи:
Практичні вікторини не оцінюються і можуть бути подані більше одного разу. | Перейдіть до ANGEL> [розділ курсу] > вкладка Уроки > Розділ 5 папка > [вікторина] |
| 3 | Виконайте дії «Спробуйте це», включаючи:
Діяльність «Спробуйте це» не оцінюється. | Інструкції надаються для кожного виду діяльності. |
| 4 | Надішліть главу 5 градуйовану вікторину | ANGEL > [розділ вашого курсу] > вкладка Уроки > Розділ 5 папка > Розділ 5 градуйована вікторина. Див. вкладку Календар в ANGEL дати. |
| 5 | Читайте коментарі та запитання, розміщені однокурсниками. Додавайте свої коментарі та питання, якщо такі є. | Коментарі та питання можуть бути розміщені на будь-якій сторінці тексту або на дискусійному форумі, присвяченому главі в ANGEL. |
5.3. Якість геопросторових даних
Якість - характеристика порівнянних речей, яка дозволяє вирішити, що одне краще іншого. У контексті географічних даних кінцевим стандартом якості є ступінь, в якій набір даних придатний для використання в конкретному додатку. Цей стандарт називається дійсністю. Стандарт варіюється від однієї програми до іншої. Загалом, однак, ключовими критеріями є те, скільки помилок присутній у наборі даних, і скільки помилок є прийнятним.
Певна ступінь похибки завжди присутня у всіх трьох компонентах географічних даних: особливості, атрибути та час. Ідеальні дані повністю описують місце розташування, ступінь та характеристики явищ саме так, як вони відбуваються в кожен момент. Як і горезвісна карта масштабу 1:1, ідеальні дані були б занадто великими та занадто детальними, щоб бути корисними для будь-якої практичної користі. Не кажучи вже про неможливості дорого створювати в першу чергу!
5.4. Помилка і невизначеність
Позиції - це вироби вимірювань. Всі вимірювання містять деяку ступінь похибки. Помилки вносяться в початковий акт вимірювання місць розташування на поверхні Землі. Помилки також вводяться, коли дані другого і третього поколінь виробляються, скажімо, шляхом сканування або оцифровки паперової карти.
Загалом, існує три джерела помилок у вимірюванні: люди, середовище, в якому вони працюють, та вимірювальні прилади, які вони використовують.
Людські помилки включають помилки, такі як неправильне читання інструменту та судження. Судження стає фактором, коли явище, яке вимірюється, безпосередньо не спостерігається (як водоносний шар) або має неоднозначні межі (як ґрунтова одиниця).
Екологічні характеристики, такі як коливання температури, сили тяжіння та магнітне схилення, також призводять до помилок вимірювань.
Помилки приладу випливають з того, що простір безперервне. Немає обмежень на те, наскільки точно може бути вказана позиція. Вимірювання, однак, можуть бути тільки настільки точними. Незалежно від того, який інструмент, завжди є межа того, наскільки невелика різниця виявляється. Ця межа називається роздільною здатністю.
На діаграмі нижче показано однакове положення (точка в центрі яблучка), виміряне двома приладами. Два шаблони сітки представляють найменші об'єкти, які можуть бути виявлені інструментами. Візерунок ліворуч представляє інструмент з вищою роздільною здатністю.
Дозвіл.
Дозвіл приладу впливає на точність вимірювань, зроблених з його допомогою. На ілюстрації нижче вимірювання зліва, яке було зроблено за допомогою приладу з вищою роздільною здатністю, є більш точним, ніж вимірювання праворуч. У цифровому вигляді більш точне вимірювання буде представлено додатковими знаками після коми. Наприклад, положення, зазначене з координатами UTM 500,000. метрів на схід і 5 000 000. метрів на північ насправді є площею 1 метр квадратний. Більш точною специфікацією буде 500 000.001 метрів на схід і 5,000,000.001 метрів на північ, що визначає положення в межах площі 1 міліметр квадратний. Ви можете думати про область як зону невизначеності, в межах якої десь існує теоретично нескінченно мале місце розташування точки. Невизначеність притаманна геопросторовим даними.
Точність одного вимірювання.
Точність набуває дещо іншого значення, коли вона використовується для позначення ряду повторних вимірювань. На ілюстрації нижче існує менша дисперсія серед дев'яти вимірювань ліворуч, ніж серед дев'яти вимірювань праворуч. Набір вимірювань зліва, як кажуть, є більш точним.
Точність багаторазових вимірювань.
Сподіваємось, ви помітили, що роздільна здатність та точність не залежать від точності. Як показано нижче, точність просто означає, наскільки точно вимірювання відповідає фактичному значенню.
Точність.
Я згадав Національний стандарт точності карт геологічної служби США в розділі 2. Що стосується топографічних карт, Стандарт гарантує, що 90 відсотків чітко визначених точок, що перевіряються, будуть знаходитися в межах певного допуску до їх фактичного положення. Іншим способом задати точність всієї просторової бази даних є обчислення середньої різниці між багатьма виміряними позиціями і фактичними позиціями. Статистику називають середньокореневою квадратичною помилкою (RMSE) набору даних.
5.5. Систематичні проти випадкових помилок
Діаграма нижче ілюструє різницю між систематичними та випадковими помилками. Систематичні помилки, як правило, узгоджуються за величиною та/або напрямком. Якщо величина і напрямок похибки відомі, точність може бути поліпшена за допомогою адитивних або пропорційних поправок. Аддитивна корекція передбачає додавання або віднімання постійного коефіцієнта коригування до кожного вимірювання; пропорційна корекція передбачає множення вимірювання (ів) на константу.
На відміну від систематичних помилок, випадкові похибки різняться за величиною і напрямком. Однак можна обчислити середнє значення набору вимірюваних позицій, і це середнє, ймовірно, буде більш точним, ніж більшість вимірювань.
Систематичні та випадкові помилки.
У наступних розділах ми порівняємо точність та джерела помилок двох важливих технологій позиціонування: геодезії та Глобальної системи позиціонування.
5.6. Контроль обстеження
Географічні положення вказуються відносно фіксованого посилання. Позиції на земній кулі, наприклад, можуть бути визначені через кути відносно центру Землі, екватора та простого меридіана. Позиції в плоских координатних сітках задаються як відстані від початку координатної системи. Висоти виражаються у вигляді відстаней вище або нижче вертикальної бази, таких як середній рівень моря, або еліпсоїд, такий як GRS 80 або WGS 84, або геоїд.
Геодезисти вимірюють горизонтальні положення в географічних або плоских системах координат щодо раніше обстежених позицій, званих контрольними точками. У США Національна геодезична зйомка (NGS) підтримує Національну систему просторової прив'язки (NSRS), яка складається з приблизно 300 000 горизонтальних та 600 000 вертикальних станцій управління (Doyle, 1994). Координати, пов'язані з горизонтальними контрольними точками, посилаються на NAD 83; відмітки - відносно NAVD 88. У розділі 2 діяльності ви, можливо, отримали один з таблиць даних, які NGS підтримує для кожної контрольної точки NSRS, поряд з більш ніж мільйоном інших точок, представлених професійними геодезистами.
Бенчмарк використовується для позначення вертикальної контрольної точки. (Томпсон, 1988).
У 1988 році НГС встановила чотири порядки точності контрольних точок, які викладені в таблиці нижче. Мінімальна точність для кожного порядку виражається по відношенню до горизонтальної відстані, що розділяє дві контрольні точки одного порядку. Наприклад, якщо ви починаєте з контрольної точки порядку АА і вимірюєте відстань 500 км, довжина лінії повинна бути точною з точністю до 3 мм базової похибки, плюс або мінус 5 мм довжина лінії похибки (500 000 000 мм × 0,01 частин на мільйон).
| Замовити | Опитувальна діяльність | Максимальна базова помилка (95% обмеження довіри) | Максимальна довжина лінії залежна помилка (95% обмеження довіри) |
|---|---|---|---|
| АА | Глобально-регіональна динаміка; деформаційні вимірювання | 3 мм | 1:100 000 000 (0,01 проміле) |
| A | Первинні мережі NSRS | 5 мм | 1:10 000 000 (0,1 проміле) |
| Б | Вторинні мережі РСЗС; високоточні інженерні вишукування | 8 мм | 1:1 000 000 (1 проміле) |
| C | NSRS наземні; залежні контрольні вишукування для картографування, земельної інформації, власності та інженерних вимог | 1-й: 1,0 см 2-я: 2,0 см 2-ий: 3,0 см 3-й: 5,0 см | 1-й: 1:100 ,000 2-й: 1:50 000 2-й: 1:20 ,000 3-й: 1:10 000 |
Стандарти точності контрольної мережі, що використовуються для Національної системи просторової прив'язки США (Федеральний комітет з геодезичного контролю, 1988).
Дойл (1994) зазначає, що горизонтальні та вертикальні системи відліку збігаються менш ніж на десять відсотків. Це тому, що
... горизонтальні станції часто розташовувалися на високих горах або вершині пагорбів, щоб зменшити потребу в будівництві оглядових веж, як правило, необхідних для забезпечення прямої видимості для вимірювань тріангуляції, траверси та трилатерації. Вертикальні контрольні точки, однак, були встановлені технікою вирівнювання спирту, яка більше підходить для проведення вздовж поступових схилів, таких як дороги та залізниці, які рідко масштабують вершини гір. (Дойл, 2002, стор. 1)
Ви можете задатися питанням, як запускається керуюча мережа. Якщо позиції вимірюються відносно інших позицій, що таке перше положення вимірюється відносно? Відповідь: зірки. До того, як надійні годинники були доступні, астрономи змогли визначити довготу лише шляхом ретельного спостереження за повторюваними небесними подіями, такими як затемнення супутників Юпітера. Сьогодні геодезисти отримують надзвичайно точні позиційні дані, аналізуючи радіохвилі, випромінювані далекими зірками. Однак після створення контрольної мережі геодезисти виробляють позиції за допомогою приладів, які вимірюють кути та відстані між місцями на поверхні Землі.
6.7. Вимірювання кутів
Кути можна виміряти магнітним компасом, звичайно. На жаль, магнітне поле Землі не дає найнадійніших вимірювань. Магнітні полюси не узгоджені з віссю обертання планети (ефект, який називається магнітним схиленням), і вони, як правило, змінюють місце розташування з часом. Місцеві магнітні аномалії, викликані намагніченими породами в земній корі та іншими геомагнітними полями, погіршують ситуацію.
З цих причин землевпорядники покладаються на транзити (або їх більш сучасні еквіваленти, звані теодолітами) для вимірювання кутів. Транзит складається з телескопа для розміщення віддалених цільових об'єктів, двох вимірювальних коліс, які працюють як транспортири для зчитування горизонтальних та вертикальних кутів, та рівнів бульбашок, щоб забезпечити правдивість кутів. Теодоліт - це по суті той же інструмент, за винятком того, що деякі механічні деталі замінюються електронікою.
Транзит. (Раїс, 1948). Використовується за дозволом.
Геодезисти виражають кути декількома способами. При вказівці напрямків, як це робиться при складанні обстеження нерухомості, кути можуть бути вказані як підшипники або азимути. Підшипник - це кут менше 90° в межах квадранта, визначеного кардинальними напрямками. Азимут - це кут від 0° до 360°, виміряний за годинниковою стрілкою від півночі. «Південь 45° Схід» і «135°» - це той самий напрямок, виражений як підшипник і як азимут. Внутрішній кут, навпаки, - це кут, виміряний між двома лініями зору або між двома ніжками траверси (описаний далі в цьому розділі).
Азимути і підшипники.
У США професійні організації, такі як Американський конгрес з геодезії та картографування, Американська асоціація земельних титулів, Національне товариство професійних геодезистів та інші, рекомендують мінімальні стандарти точності для вимірювання кута та відстані. Наприклад, як зазначає Стів Хендерсон (особисте спілкування, осінь 2000 року, оновлено липень 2010), Алабамське товариство професійних геодезистів рекомендує, щоб помилки в вимірюваннях кута в «комерційні/високий ризик» обстежень не перевищували 15 секунд квадратного кореня кількості виміряних кутів.
Щоб досягти такого рівня точності, геодезисти повинні подолати помилки, спричинені несправним калібруванням приладу; вітром, температурою та м'яким грунтом; і людські помилки, включаючи неправильне розміщення приладу та неправильне зчитування вимірювальних коліс. На практиці геодезисти виробляють точні дані шляхом проведення повторних вимірювань і усереднення результатів.
8. Вимірювання відстані
Для вимірювання відстаней землевпорядники колись використовували металеві стрічки довжиною 100 футів, які градуйовані в сотих частках фута. (Це методика, яку я вивчив, будучи студентом на заняттях з геодезії в Університеті Вісконсіна на початку 1980-х років. Малюнок, показаний нижче, трохи раніше.) Відстані по схилах вимірюються короткими горизонтальними відрізками. Кваліфіковані геодезисти можуть досягти точності до однієї частини в 10 000 (похибка 1 сантиметр на кожні 100 метрів відстані). Джерела помилок включають недоліки самої стрічки, такі як перегини; зміни довжини стрічки через екстремальні температури; і людські помилки, такі як непослідовне витягування, що дозволяє стрічці відхилятися від горизонтальної площини, і неправильні показання.

Геодезична група вимірювання базової відстані металевою (Invar) стрічкою. (Ходжсон, 1916).
З 1980-х років електронні прилади вимірювання відстані (EDM) дозволили геодезистам вимірювати відстані більш точно та ефективніше, ніж вони можуть за допомогою стрічок. Для вимірювання горизонтальної відстані між двома точками один геодезист використовує інструмент EDM для зйомки енергетичної хвилі до відбивача, що утримується другим геодезистом. EDM записує минулий час між випромінюванням хвилі та її поверненням від відбивача. Потім він обчислює відстань як функцію часу, що минув. Типові EDM короткого діапазону можуть бути використані для вимірювання відстаней до 5 кілометрів з точністю до однієї частини в 20 000, що вдвічі точніше, ніж стрічка.

Загальна станція.
Прилади, звані тахеометами, поєднують в собі електронне вимірювання відстані та можливості вимірювання кута теодолітів в одній одиниці. Далі розглянемо, як ці прилади використовуються для вимірювання горизонтальних положень по відношенню до встановлених мереж управління.
5.9. Горизонтальні положення
Геодезисти розробили чіткі методи, засновані на окремих контрольних мережах, для вимірювання горизонтальних і вертикальних положень. У цьому контексті горизонтальне положення - це розташування точки відносно двох осей: екватора та простого меридіана на земній кулі, або осей x та y у плоській системі координат. Контрольні точки прив'язують системи координат до фактичних місць на землі; вони є фізичними проявами горизонтальних датумів. На наступних сторінках ми розглядаємо два методи, які геодезисти використовують для створення та розширення мереж управління (тріангуляція та трилатерація) та два інші методи, що використовуються для вимірювання положень щодо контрольних точок (відкриті та закриті траверси).
5.10. Траверс
Геодезисти зазвичай вимірюють позиції послідовно. Починаючи з контрольних точок, вони вимірюють кути та відстані до нових місць та використовують тригонометрію для обчислення позицій у плоській системі координат. Вимірювання ряду позицій таким чином відоме як «біг траверси». Траверса, яка починається і закінчується в різних місцях, називається відкритою траверсою.
Відкрита траверса. (Адаптовано з Робінсона та ін., 1995)
Наприклад, скажімо, координати UTM точки А на ілюстрації вище становлять 500 000,00 E і 5 000 000,00 N. Відстань між точками A і P, виміряна сталевою стрічкою або EDM, становить 2828,40 метрів. Азимут лінії АП, виміряної транзитом або теодолітом, дорівнює 45º. Використовуючи ці два вимірювання, координати UTM точки P можна обчислити наступним чином:
XP = 500,000,00 + (2828,40 × гріх 45) = 501 999,98
РР = 5000,000,00 + (2 828.40 × кос 45°) = 5 001 999,98
Траверса, яка починається і закінчується в одній точці, або в двох різних, але відомих точках, називається замкнутою траверсою. Похибки вимірювання в замкнутій траверсі можна кількісно оцінити шляхом підсумовування внутрішніх кутів багатокутника, утвореного траверсою. Точність вимірювання одного кута не може бути відома, але оскільки сума внутрішніх кутів багатокутника завжди (n-2) × 180, можна оцінити хід в цілому і розподілити накопичені похибки між усіма внутрішніми кутами.
Помилки, що виникають у відкритій траверсі, яка не закінчується там, де вона почалася, не можуть бути оцінені або виправлені. Єдиний спосіб оцінити точність відкритої траверси - виміряти відстані і кути багаторазово, вперед і назад, і усереднити результати розрахунків. Оскільки повторні вимірювання є дорогими, інші методи геодезії, які дозволяють геодезистам розраховувати та враховувати похибку вимірювання, є кращими перед відкритими траверсами для більшості застосувань.
5.11. Тріангуляція
Закриті траверси дають адекватну точність для обстежень кордонів майна за умови, що встановлена контрольна точка знаходиться поблизу. Геодезисти проводять контрольні обстеження для розширення та ущільнення горизонтальних контрольних мереж. До того, як було доступно супутникове позиціонування топографічного рівня, найпоширенішою методикою проведення контрольних зйомок була тріангуляція.
Метою контрольної зйомки є встановлення нових горизонтальних контрольних точок (B, C та D) на основі існуючої контрольної точки (А).
Використовуючи тахеометр, оснащений електронним приладом вимірювання відстані, контрольна група обстеження починає з вимірювання азимуту альфа та базової відстані AB. Ці два вимірювання дозволяють дослідницькій групі обчислити позицію B, як у відкритій траверсі. До того, як геодезичний GPS став доступний, точність розрахункового положення B, можливо, оцінювалася астрономічним спостереженням.
Встановлення другої контрольної точки (B) в тріангуляційній мережі.
Наступні геодезисти вимірюють внутрішні кути CAB, ABC та BCA в точці A, B та C. Знаючи внутрішні кути та довжину базової лінії, тригонометричний «закон синусів» потім може бути використаний для обчислення довжин будь-якої іншої сторони. Знаючи ці розміри, геодезисти можуть зафіксувати положення точки С.
Встановлення положення точки С шляхом тріангуляції.
Вимірявши три внутрішні кути і довжину однієї сторони трикутника ABC, контрольна група обстеження може обчислити довжину сторони BC. Потім ця розрахункова довжина служить базовою лінією для трикутника BDC. Таким чином, тріангуляція використовується для розширення мереж управління, точка за точкою і трикутник за трикутником.
Розширення мережі тріангуляції.
5.12. Трилатерація
Трилатерація є альтернативою тріангуляції, яка спирається лише на вимірювання відстані. Електронні технології вимірювання відстані роблять трилатерацію економічно вигідною технікою позиціонування для контрольних обстежень. Мало того, що він використовується геодезистами, трилатерація також використовується для визначення координат розташування за допомогою супутників та приймачів Глобальної системи позиціонування.
Трилатерація використовується для розширення мереж управління шляхом встановлення нових контрольних точок (B, C і D) на основі існуючих контрольних точок (A).
Трилатераційні мережі починаються так само, як і тріангуляційні мережі. Якщо доступна лише одна існуюча контрольна точка, друга точка (В) встановлюється відкритою траверсою. Використовуючи тахеометр, оснащений електронним приладом вимірювання відстані, група обстеження вимірює азимут α та базову відстань AB. Оператор тахеометра може встановити свій інструмент над точкою А, тоді як її помічник тримає відбивач, встановлений на високому полюсі плеча так само стійко, як він може над точкою B. Залежно від вимог контрольного обстеження, точність розрахункового положення B може бути підтверджена астрономічним спостереженням.
Встановлення другої контрольної точки (B) в трилатераційної мережі.
Далі група обстеження використовує функцію електронного вимірювання відстані загальної станції для вимірювання відстаней змінного струму та БК. Проводяться виміри як вперед, так і назад. Після того, як вимірювання зменшуються від відстаней нахилу до горизонтальних відстаней, закон косинусів може бути використаний для обчислення внутрішніх кутів, а координати положення C можуть бути зафіксовані. Точність виправлення потім перевіряється шляхом побудови трикутника ABC і оцінки похибки закриття.
Вимірювання відстаней змінного струму і БК.
Далі трилатераційна мережа розширюється шляхом вимірювання відстаней CD і BD і фіксації точки D в площинній системі координат.
Фіксація контрольної точки D шляхом трилатерації.
СПРОБУЙ ЦЕ!
ВИКОРИСТОВУВАТИ ТРИЛАТЕРАЦІЮ ДЛЯ ВИЗНАЧЕННЯ МІСЦЯ РОЗТАШУВАННЯ КОНТРОЛЬНОЇ ТОЧКИ
Трилатерація - це методика землеустрою, яку використовують для обчислення невизначеного положення в площинній системі координат шляхом вимірювання відстаней від двох відомих положень. Як ви побачите пізніше в цьому розділі, трилатерація - це також техніка, яку GPS-приймачі використовують для обчислення своїх положень на поверхні Землі відносно положень трьох або більше супутникових передавачів. Мета цієї вправи - переконатися, що ви розумієте, як працює трилатерація. (Орієнтовний час виконання: 5 хвилин.)
Примітка. Щоб виконати цю вправу, вам потрібно буде встановити програвач Adobe Flash. Якщо у вас ще немає Flash player, ви можете завантажити його безкоштовно з Adobe.
- Відображення сітки системи координат: У цій вправі ви будете взаємодіяти з сіткою системи координат. Спочатку відобразіть сітку системи координат в окремому вікні, щоб ви могли взаємодіяти з нею під час читання цих інструкцій. Впорядкуйте вікно сітки системи координат і це вікно так, щоб ви могли легко переглядати обидва. Можливо, вам доведеться зробити це вікно більш вузьким. Дві контрольні точки, A і B, нанесені на сітку системи координат. Оглядовий екіпаж виміряв відстані від контрольних точок до іншої точки, точки С, координати якої невідомі. Ваше завдання - зафіксувати положення точки С. Ви знайдете точку С на перетині двох кіл, зосереджених на контрольних точках A і B, де радіуси двох кіл дорівнюють виміряним відстаням від контрольних точок до точки С.
- Покладіть відстань від контрольної точки А до точки С: На сітці системи координат натисніть на контрольну точку А, щоб відобразити форму введення даних. (Вам потрібно буде натиснути на фактичну точку, а не на «А».) Форма складається з текстового поля, в якому ви можете вводити на відстані, і кнопки, яка відображає коло по центру точки А. Радіус кола буде вказаною вами відстані. Згідно з вимірами геодезистів, відстань між контрольною точкою А і точкою С становить 9400 футів. Введіть цю відстань зараз і натисніть кнопку «Графік», щоб побудувати коло. [Переглянути результат кроку 2]
- Покладіть відстань від контрольної точки B до точки C: Виміряна відстань від точки B до точки C становить 7000 футів. Клацніть на точку B (на фактичній точці, а не на «B»), введіть цю відстань і побудуйте коло. [Переглянути результат кроку 3]
- Графік точки C: Тепер клацніть всередині координатної сітки, щоб виявити положення точки С. Можливо, вам доведеться полювати на неї, але ви повинні знати, де шукати, виходячи з перетину кіл. [Переглянути результат кроку 4]
- Розширте мережу управління далі: Тепер продовжуйте розширювати мережу управління, побудувавши четверту точку, точку D, у сітці системи координат. Спочатку побудуйте нові кола в точках А і С. Виміряна відстань від точки А до точки D становить 9600 футів. Виміряна відстань від точки С до точки D становить 8000 футів. (Можливо, ви захочете встановити радіус кола з центром у точці B до 0.) Нарешті, натисніть на сітці системи координат, щоб побудувати точку D. [Переглянути результат кроку 5]
Після того, як ви закінчите перегляд сітки, закрийте спливаюче вікно.
ПРАКТИКА ВІКТОРИНИ
Зареєстровані студенти штату Пенн повинні повернутися зараз до папки Chapter 5 в ANGEL (через меню Ресурси ліворуч), щоб пройти самооцінку вікторини про горизонтальні позиції. Ви можете приймати практичні вікторини стільки разів, скільки хочете. Вони не забиваються і ніяк не впливають на вашу оцінку.
5.13. Вертикальні позиції
Вертикальне положення - це висота точки відносно якоїсь опорної поверхні, наприклад середнього рівня моря, геоїда або еліпсоїда. Приблизно 600 000 вертикальних контрольних точок у Національній системі просторової прив'язки США (NSRS) посилаються на північноамериканську вертикальну базу 1988 року (NAVD 88). Геодезисти створили Національну геодезичну вертикальну дату 1929 року (НГВД 29, попередник НАВД 88), розрахувавши середню висоту моря на всіх етапах припливу на 26 приливних станціях протягом 19 років. Потім вони розширили мережу управління вглиб країни, використовуючи геодезичну техніку, яка називається нівелюванням. Вирівнювання все ще є економічно ефективним способом отримання даних про висоту з точністю до метра.

Нівелювальна бригада на роботі в 1916 році. (Ходжсон, 1916).
На ілюстрації вище показаний нівелюючий екіпаж на роботі. Побратим під парасолькою вдивляється через телескоп вирівнюючого інструменту. Перш ніж проводити будь-які вимірювання, геодезист переконався, що телескоп розташований посередині між відомою точкою висоти та цільовою точкою. Після того, як інструмент був належним чином вирівняний, він сфокусував перехрестя телескопа на розмітці висоти на стрижні, що утримується товаришем з правого боку зображення. Хлопчик вниз на одне коліно відзначає в польовій книзі вимірювання висоти, викликане оператором телескопа.

Рівень, який використовується для визначення висот.
Вирівнювання все ще є економічно ефективним способом отримання даних про висоту з точністю до метра. Сучасний нівелюючий прилад показаний на фотографії вище. Діаграма нижче ілюструє техніку під назвою диференціальне вирівнювання.
Диференціальне нівелювання. (Адаптовано з Вольф і Брінкер, 1994)
Діаграма вище ілюструє диференціальне вирівнювання. Прилад вирівнювання розташовується посередині між точкою, в якій відома висота землі (точка А), і точкою, висота якої повинна бути виміряна (B). Висота приладу над базовою висотою дорівнює HI. Геодезист спочатку зчитує вимірювання задньої видимості (BS) з вирівнюючого стрижня, що утримується його надійним помічником над еталоном на А. Висота приладу може бути розрахована як сума відомої висоти на еталоні (ZA) та висота заднього огляду (BS). Потім помічник переміщує стрижень до точки B. Геодезист обертає телескоп на 180°, потім зчитує передбачення (FS) зі стрижня в B. Висота в B (ZB) потім може бути розрахована як різниця між висотою приладу (HI) та висотою передбачення (FS).
Колишній студент Генрі Уітбек (особисте спілкування, осінь 2000) вказує, що геодезисти також використовують тахеометри для вимірювання вертикальних кутів і відстаней між фіксованими точками (призми, встановлені на штативах на фіксованих висотах), а потім обчислюють висоти за допомогою тригонометричного вирівнювання.
ВИСОТИ
Геодезисти використовують термін висота як синонім висоти. Існує кілька різних способів вимірювання висоти. Правильно орієнтований рівень визначає лінію, паралельну поверхні геоїду в цій точці (Van Sickle, 2001). Висота над геоїдом називається ортометричної висотою. Однак GPS-приймачі не можуть безпосередньо виробляти ортометричні висоти. Натомість GPS створює висоти щодо еліпсоїда WGS 84. Тому висоти, вироблені за допомогою GPS, називаються еліпсоїдальними (або геодезичними) висотами.
ПРАКТИКА ВІКТОРИНИ
Зареєстровані студенти штату Пенн повинні повернутися зараз до папки Chapter 5 в ANGEL (через меню Ресурси ліворуч), щоб пройти самооцінку вікторини про вертикальні позиції. Ви можете приймати практичні вікторини стільки разів, скільки хочете. Вони не забиваються і ніяк не впливають на вашу оцінку.
5.14. Глобальна система позиціонування
Сигнали позиціонування, що транслюються з трьох супутників Глобальної системи позиціонування, приймаються в місці на Землі. (Федеральне управління авіації США, 2007b)
Глобальна система позиціонування (GPS) використовує трилатерацію для обчислення координат позицій на поверхні Землі або поблизу неї. Трилатерація відноситься до тригонометричного закону, за яким внутрішні кути трикутника можуть бути визначені, якщо відомі довжини всіх трьох сторін трикутника. GPS розширює цей принцип на три виміри.
GPS-приймач може зафіксувати свою широту і довготу, обчислюючи його відстань від трьох або більше супутників, що обертаються Землею, положення яких в просторі і часі відомі. Якщо чотири або більше супутників знаходяться в межах «горизонту» приймача, приймач також може обчислити його висоту і навіть швидкість. Міністерство оборони США створило Глобальну систему позиціонування як допоміжний засіб для навігації. Оскільки він був оголошений повністю працездатним у 1994 році, GPS-позиціонування було використано для всього, починаючи від відстеження транспортних засобів доставки, до відстеження хвилинних рухів тектонічних плит, що складають земну кору, до відстеження рухів людей. Окрім так званого користувацького сегмента, що складається з GPS-приймачів та людей, які використовують їх для вимірювання позицій, система складається з двох інших компонентів: космічного сегмента та сегмента управління. На будівництво пішло близько 10 мільярдів доларів за 16 років.
Росія підтримує аналогічну супутникову систему позиціонування під назвою ГЛОНАСС. Країни-члени Європейського Союзу знаходяться в процесі розгортання порівнянної власної системи, яка називається Галілео. Перший експериментальний супутник GIOVE-A почав передавати сигнали Galileo в січні 2006 року. Метою проекту «Галілео» є сузір'я з 30 навігаційних супутників до 2020 року. Якщо інженерам та політикам вдасться зробити Galileo, GLONASS та глобальну систему позиціонування США сумісними, як зараз здається ймовірним, результатом буде Глобальна навігаційна супутникова система (GNSS), яка забезпечує більш ніж удвічі більше сигналу в космосі ресурс, доступний за допомогою GPS поодинці. Китайці почали роботу над власною системою під назвою Бейду в 2000 році. Наприкінці 2011 року вони мали десять супутників на орбіті, обслуговуючи саме Китай, метою якої є глобальна система з 35 супутників до 2020 року.
У цьому розділі ви навчитеся:
- Поясніть, як радіосигнали, що транслюються супутниками Глобальної системи позиціонування, використовуються для обчислення позицій на поверхні Землі; і
- Опишіть функції простору, управління та користувальницьких сегментів Глобальної системи позиціонування.
5.15. Космічний сегмент
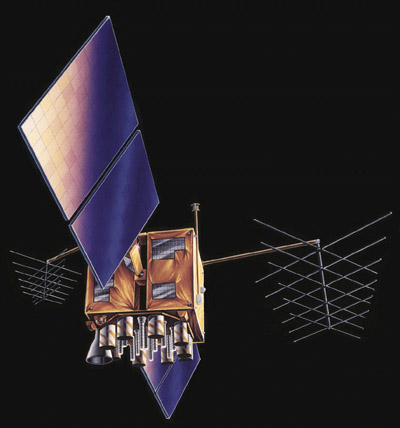
Космічний сегмент Глобальної системи позиціонування в даний час складається приблизно з 30 активних і запасних супутників NAVSTAR (періодично запускаються нові супутники, а старі виводяться з експлуатації). «NAVSTAR» розшифровується як «Навігаційна система з синхронізацією та діапазоном». Кожен супутник об'їжджає Землю кожні 12 годин в сидеричному часі уздовж одного з шести орбітальних «літаків» на висоті 20 200 км (близько 12 500 миль). Супутники транслюють сигнали, що використовуються приймачами GPS на землі для вимірювання позицій. Супутники розташовані таким чином, що принаймні чотири «на виду» всюди на поверхні Землі або поблизу поверхні Землі в будь-який час, як правило, до восьми і потенційно 12 «на увазі» в будь-який момент часу.

Сузір'я GPS супутників. Ілюстрація © Смітсонівський інститут, 1988. Використовується дозволом.
СПРОБУЙ ЦЕ!
Навігаційний центр берегової охорони США публікує звіти про стан супутникового сузір'я GPS. Наприклад, у його доповіді від 17 серпня 2010 року було перераховано 31 супутник, п'ять-шість на кожному з шести орбіт літаків (A-F), і один запланований вихід з ладу, 19 серпня 2010 року. Ви можете переглянути поточний стан сузір'я тут.
Виконавча передача супутника NAVSTAR (Офіс спільної програми NAVSTAR GPS, н.д.).
СПРОБУЙ ЦЕ!
Наукові програмісти Національного управління з аеронавтики та космонавтики США (NASA) створили інтерактивну тривимірну модель Землі та орбіт понад 500 техногенних супутників, які її оточують. Модель являє собою аплет Java під назвою J-Track 3D супутникове відстеження. Для перегляду аплету у вашому браузері повинна бути включена Java. Інструкції на сайті описують, як можна збільшувати і зменшувати масштаб, а також перетягувати для повороту моделі. Щоб переглянути орбіти окремих супутників, виберіть Вибрати в меню Супутник. Серії Block IIA і R є найбільш актуальним поколінням супутників NAVSTAR.
5.16. Керуючий сегмент
Керуючий сегмент Глобальної системи позиціонування - це мережа наземних станцій, яка контролює форму і швидкість орбіт супутників. Точність даних GPS залежить від того, щоб знати положення супутників у будь-який час. Орбіти супутників іноді порушуються взаємодією гравітаційних сил Землі і Місяця.
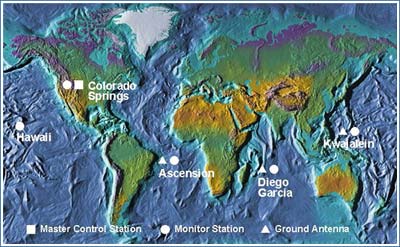
Сегмент управління Глобальної системи позиціонування (Федеральне управління авіації США, 2007b).
Станції монітора - це дуже точні приймачі GPS, встановлені в відомих місцях. Вони фіксують розбіжності між відомими та розрахованими позиціями, спричинені невеликими коливаннями орбіт супутника. Дані, що описують орбіти, виробляються на головній контрольній станції в Колорадо-Спрінгс, завантажуються на супутники і, нарешті, транслюються як частина сигналу позиціонування GPS. GPS-приймачі використовують ці дані супутникового навігаційного повідомлення для коригування позицій, які вони вимірюють.
При необхідності головний центр управління може змінювати орбіти супутника командами, що передаються через наземні антени керуючого сегмента.
5.17. Сегмент користувача
Федеральне управління авіації США (FAA) підрахувало в 2006 році, що близько 500 000 GPS-приймачів використовуються для багатьох застосувань, включаючи геодезію, транспорт, точне землеробство, геофізику та відпочинок, не кажучи вже про військову навігацію. Це було до того, як в автомобілі GPS навігаційні гаджети з'явилися як один з найпопулярніших споживчих електронних подарунків під час сезону відпусток 2007 в Північній Америці.
Основні GPS-приймачі споживчого класу, як і досить старомодний, показаний нижче, складаються з радіоприймача та внутрішньої антени, цифрового годинника, якогось графічного та кнопкового інтерфейсу користувача, комп'ютерного чіпа для виконання розрахунків, пам'яті для зберігання шляхових точок, гнізд для підключення зовнішньої антени або завантажити дані на комп'ютер, а ліхтарик батарейок для живлення. Радіоприймач в блоці, показаному нижче, включає 12 каналів для прийому сигналу від декількох супутників одночасно.

Рекреаційний GPS-приймач, близько 1998 року.
Супутники NAVSTAR Block II транслюються на двох частотах, 1575.42 МГц (L1) і 1227,6 МГц (L2). (Для порівняння, FM-радіостанції транслюються в діапазоні від 88 до 108 МГц.) Тільки L1 призначався для цивільного використання. Одночастотні приймачі виробляють горизонтальні координати з точністю близько трьох-семи метрів (або приблизно від 10 до 20 футів) вартістю близько 100 доларів. Деякі одиниці дозволяють користувачам підвищити точність шляхом фільтрації помилок, виявлених сусідніми стаціонарними приймачами, пост-процес називається «диференціальна корекція». $300-500 одночастотні одиниці, які також можуть отримувати виправлені сигнали L1 від системи збільшення широкої площі Федеральної авіаційної адміністрації США ( WAAS) мережа наземних станцій і супутників може виконувати диференціальну корекцію в режимі «реального часу». Диференціально виправлені координати, отримані одночастотними приймачами, можуть бути настільки ж точними, як від одного до трьох метрів (приблизно від 3 до 10 футів).
Сигнал, що транслюється на частоті L2, зашифрований лише для військового використання. Розумні виробники GPS-приймачів незабаром з'ясували, однак, як зробити двочастотні моделі, які можуть вимірювати невеликі відмінності у часі прибуття двох сигналів (вони називаються приймачами «диференціальних фаз несучої фази»). Такі відмінності можуть бути використані для використання частоти L2 для підвищення точності без декодування зашифрованого військового сигналу. Оглядові приймачі несучої фази, здатні виконувати в режимі реального часу кінематичну (RTK) диференціальну корекцію, можуть виробляти горизонтальні координати з точністю до субметра вартістю від 1000 до 2000 доларів. Не дарма GPS замінив електрооптичні прилади для багатьох геодезичних завдань.
Тим часом нове покоління супутників NAVSTAR (серія Block IIR-M) додасть цивільний сигнал на частоті L2, що дозволить істотно покращити позиціонування GPS.
5.18. Супутниковий діапазон
GPS-приймачі розраховують відстані до супутників залежно від кількості часу, необхідного для того, щоб сигнали супутників досягли землі. Щоб зробити такий розрахунок, приймач повинен вміти точно сказати, коли був переданий сигнал, і коли він був отриманий. Супутники оснащені надзвичайно точними атомними годинами, тому терміни передач завжди відомі. Приймачі містять дешевші годинники, які, як правило, є джерелами похибки вимірювань. Сигнали, що транслюються супутниками, звані «псевдовипадковими кодами», супроводжуються даними трансляції ефемерид, які описують форми супутникових орбіт.
GPS-приймачі розраховують відстань як функцію різниці в часі трансляції і прийому сигналу GPS. (Адаптовано з Гурна, 1989).
Сузір'я GPS налаштовано так, що мінімум чотири супутники завжди «на виду» всюди на Землі. Якби приймач був доступний лише один супутниковий сигнал, набір можливих позицій включав би всю сферу дальності, що оточує супутник.
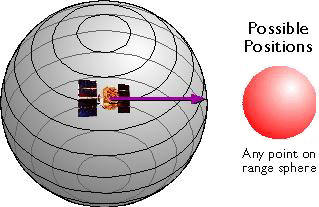
Набір можливих положень GPS приймача щодо одного супутника GPS. (Адаптовано з Гурна, 1993).
Якщо два супутники доступні, приймач може сказати, що його положення знаходиться десь по колу, утвореному перетином двох сферичних діапазонів.
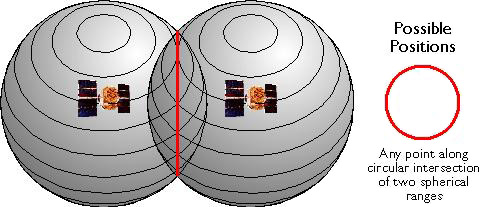
Набір можливих положень GPS приймача щодо двох супутників GPS. (Адаптовано з Гурна, 1993).
Якщо відомі відстані від трьох супутників, положення приймача повинно бути однією з двох точок на перетині трьох сферичних діапазонів. GPS-приймачі, як правило, досить розумні, щоб вибрати місце, найближче до поверхні Землі. Як мінімум, для двомірної (горизонтальної) фіксації потрібно три сателіта. Для тривимірної фіксації потрібні чотири діапазони (горизонтальний і вертикальний).
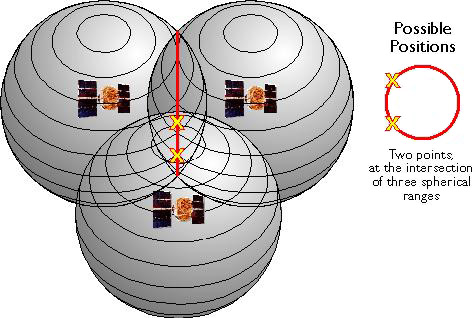
Набір можливих положень GPS приймача щодо трьох супутників GPS. (Адаптовано з Гурна, 1993).
Ранжування супутників схоже за концепцією з плоскою зйомкою методом трилатерації, за допомогою якого горизонтальні положення розраховуються як функція відстаней від відомих локацій. Супутникове сузір'я GPS фактично є орбітальною мережею управління.
СПРОБУЙ ЦЕ!
Trimble має підручник «розроблений, щоб дати вам гарне базове розуміння принципів GPS, не завантажуючи вас із занадто великою кількістю технічних деталей». Перевірте це за адресою http://www.trimble.com/gps_tutorial/. Натисніть «Чому GPS?» щоб розпочати роботу.
ПРАКТИКА ВІКТОРИНИ
Зареєстровані студенти штату Пенн повинні повернутися зараз до папки Chapter 5 в ANGEL (через меню Ресурси ліворуч), щоб пройти тест самооцінки про компоненти GPS. Ви можете приймати практичні вікторини стільки разів, скільки хочете. Вони не забиваються і ніяк не впливають на вашу оцінку.
5.19. Джерела помилок GPS
Думовий експеримент (Wormley, 2004): Прикріпіть GPS-приймач до штатива. Увімкніть його і записуйте його положення кожні десять хвилин протягом 24 годин. Наступного дня побудуйте 144 координати, розраховані вашим приймачем. Як ви вважаєте, як би виглядав сюжет?
Ви уявляєте хмару точок, розкиданих навколо фактичного місця розташування? Це розумне очікування. Тепер уявіть собі, намалюйте коло або еліпс, який охоплює близько 95 відсотків точок. Яким буде радіус цього кола або еліпса? (Іншими словами, яка помилка позиціонування вашого приймача?)
Відповідь частково залежить від вашого приймача. Якщо ви використовували стодоларовий приймач, радіус кола, який ви намалювали, може становити цілих десять метрів, щоб захопити 95 відсотків точок. Якщо ви використовували одночастотний приймач з підтримкою WAAS, який коштував кілька сотень доларів, ваш еліпс помилки може зменшитися до одного-трьох метрів або близько того. Але якщо ви витратили кілька тисяч доларів на подвійний частотний приймач опитування, радіус кола помилок може бути таким же малим, як сантиметр або менше. Загалом, користувачі GPS отримують те, за що платять.
У міру зростання ринку GPS-позиціонування приймачі стають дешевшими. Тим не менш, існує безліч картографічних додатків, для яких непрактично використовувати блок обстеження класу. Наприклад, якщо ваше завдання полягало в GPS 1,000 люків для вашого муніципалітету, ви, ймовірно, не хотіли б налаштувати та калібрувати приймач опитування класу 1000 разів. Як же тоді ви можете мінімізувати помилки, пов'язані з приймачами класу відображення? Розумне початок - зрозуміти джерела помилки GPS.
У цьому розділі ви навчитеся:
- Вкажіть види та величину помилок та невизначеності, пов'язаних із невиправленим GPS-позиціонуванням; і
- Використовуйте діаграму PDOP, щоб визначити оптимальний час для позиціонування GPS у певному місці та даті.
Примітка: Моїм основним джерелом матеріалу в цьому розділі є текст Яна Ван Серпа GPS для геодезистів, 2-е видання. Якщо ви хочете читабельну і набагато більш детальну обробку цього матеріалу, рекомендую книгу Яна. Дивіться бібліографію в кінці цього розділу для отримання додаткової інформації про цей та інші ресурси.
5.20. Еквівалентні користувачеві помилки діапазону
«UERE» - це парасольковий термін для всіх наведених нижче джерел помилок, які представлені у порядку зменшення їх внесків до загального бюджету помилок.
- Супутниковий годинник: GPS-приймачі обчислюють свої відстані від супутників як функція різниці в часі між тим, коли сигнал передається супутником, і коли він приймається на землю. Атомні годинники на борту супутників NAVSTAR надзвичайно точні. Вони, як правило, відхиляються до однієї мілісекунди стандартного часу GPS (який відкалібрований до, але не ідентичний, Координований універсальний час). Станції моніторингу, що входять до складу GPS «Сегмент управління», розраховують кількість дрейфу годин, пов'язаного з кожним супутником. GPS-приймачі, які можуть використовувати дані корекції годин, які супроводжують сигнали GPS, можуть значно зменшити помилку годинника.
- Верхня атмосфера (іоносфера): Космос майже вакуум, але атмосфера не. сигнали GPS затримуються і відхиляються, коли вони проходять через іоносферу, зовнішні шари атмосфери, які простягаються приблизно від 50 до 1000 км над поверхнею Землі. Сигнали, що передаються супутниками близько до горизонту, проходять довший маршрут через іоносферу, ніж сигнали від супутників над головою, і, таким чином, піддаються більшим перешкодам. Щільність іоносфери змінюється залежно від широти, сезону та часу доби, у відповідь на ультрафіолетове випромінювання Сонця, сонячні бурі та максимуми, а також розшарування самої іоносфери. Однак сегмент управління GPS здатний моделювати іоносферні упередження. Станції моніторингу передають поправки на супутники NAVSTAR, які потім транслюють поправки разом із сигналом GPS. Такі виправлення усувають лише близько трьох чвертей ухилу, однак залишаючи іоносферу другим за величиною внеском бюджету помилок GPS.
- Годинник приймача: GPS-приймачі оснащені кварцовими кришталевими годинниками, які менш стабільні, ніж атомні годинники, що використовуються в супутниках NAVSTAR. Помилка годинника приймача може бути усунена, однак, порівнявши час надходження сигналів від двох супутників (час передачі яких точно відомий).
- Супутникова орбіта: GPS-приймачі обчислюють координати щодо відомих місць розташування супутників у космосі. Знання того, де знаходяться супутники в будь-який момент, передбачає знання форм їх орбіт, а також їх швидкостей. Гравітаційні пам'ятки Землі, Сонця та Місяця ускладнюють форми орбіт супутника. Сегмент GPS Control відстежує розташування супутників у будь-який час, обчислює ексцентриситети орбіти та компілює ці відхилення в документах, які називаються ефемеридами. Ефемерида складається для кожного супутника і транслюється за допомогою супутникового сигналу. GPS-приймачі, які здатні обробляти ефемериди, можуть компенсувати деякі орбітальні помилки.
- Нижня атмосфера: (тропосфера, тропосфера та стратосфера) Три нижні шари атмосфери інкапсулюють Землю від поверхні до висоти близько 50 км. Нижня атмосфера затримує сигнали GPS, трохи додаючи до розрахункових відстаней між супутниками і приймачами. Сигнали від супутників, близьких до горизонту, затримуються найбільше, оскільки вони проходять через більше атмосфери, ніж сигнали від супутників над головою.
- Багатопроменевий: В ідеалі GPS-сигнали подорожують від супутників через атмосферу безпосередньо до GPS-приймачів. Насправді GPS-приймачі повинні розрізняти сигнали, отримані безпосередньо від супутників, та інші сигнали, які були відображені від навколишніх об'єктів, таких як будівлі, дерева і навіть земля. Деякі, але не всі, відбиті сигнали ідентифікуються автоматично і відхиляються. Антени призначені для мінімізації перешкод від сигналів, що відбиваються знизу, але сигнали, відбиті зверху, важче усунути. Одним з методів мінімізації багатопроменевих помилок є відстеження лише тих супутників, які знаходяться принаймні на 15° над горизонтом, поріг називається «кутом маски».
Дуглас Уелш (особисте спілкування, зима 2001), керівник інспектора нафти і газу Департаменту охорони навколишнього середовища Пенсільванії, писав про проблеми, пов'язані з позиціонуванням GPS в нашій шиї лісу: «... у багатьох районах Пенсільванії горизонт є обмежуючим фактором. У місті з високими будівлями і глибокими долинами деяких частин Пенсільванії важко знайти час доби, коли сузір'я матиме чотири супутники на будь-який проміжок часу. У лісах з високими листяними породами багатопроменевий настільки поширений, що я сумнівався б у точності будь-якого місця, якщо читання не було зроблено кілька разів». Van Sickle (2005) зазначає, однак, що зусилля з модернізації GPS та GNSS цілком можуть покращити такі прогалини.
Чи мали ви подібний досвід роботи з GPS? Якщо так, будь ласка, залиште коментар до цієї сторінки.
5.21. Розведення точності
Розташування супутників в небі також впливає на точність GPS-позиціонування. Ідеальним розташуванням (з мінімальних чотирьох супутників) є один супутник безпосередньо над головою, три інших однаково розташовані біля горизонту (над кутом маски). Уявіть собі велику парасольку, яка охоплює більшу частину неба, де супутники утворюють кінчик і кінці колючок парасольки.
GPS-координати, розраховані, коли супутники згруповані близько один до одного в небі, страждають від розбавлення точності (DOP), коефіцієнт, який примножує невизначеність, пов'язану з Equivalent Range Errors (UERE) - помилки, пов'язані з годинником супутника та приймача, атмосферою , орбіти супутника та умови навколишнього середовища, які призводять до багатопроменевих помилок). DOP, пов'язаний з ідеальним розташуванням сузір'я супутника, дорівнює приблизно 1, що не збільшує UERE. За даними Van Sickle (2001), найнижчий DOP, що зустрічається на практиці, становить близько 2, що подвоює невизначеність, пов'язану з UERE.
GPS-приймачі повідомляють про декілька компонентів DOP, включаючи горизонтальне розведення точності (HDOP) та вертикальне розведення точності (VDOP). Поєднання цих двох складових тривимірного положення називається PDOP — точність розведення позиції. Ключовим елементом планування місій GPS є визначення часу доби, коли PDOP зведено до мінімуму. Оскільки супутникові орбіти відомі, PDOP можна прогнозувати на певний час і місце розташування. Різні програмні продукти дозволяють визначити, коли умови найкращі для роботи GPS.
Студент MGIS Джейсон Сетцер (зима 2006) пропонує наступний наочний анекдот:
Я мав можливість використовувати технологію GPS-обстеження для збору даних наземного контролю в моєму регіоні, і найбільшою проблемою часто є проблема PDOP (точність розведення позиції). Проблема в моїй гірській місцевості полягає в тому, як місцевість дійсно закриває приймач від доступу до достатньої кількості супутникових сигналів.
Під час одного опитування в Колорадо-Спрінгс я зіткнувся з досить екстремальним прикладом цього. Географічно Колорадо-Спрінгс розташований прямо проти фронтових хребтів Скелястих гір, з піком 14,000 футів Пайка на захід від міста. Мій пристрій GPS легко міг «побачити» п'ять, шість або навіть сім супутників, поки я був на східній половині міста. Однак далі захід я подорожував, я почав бачити поступово менше сузір'я, до того моменту, коли мій приймач зміг знайти лише один або два супутники. Якщо огляд неба на 180 градусів від горизонту до горизонту є ідеальним, то в певних місцях я міг бачити, можливо, 110 градусів.
Не було справжньої роботи навколо, крім терпіння. Я зміг відрегулювати свої точки огляду достатньо, щоб максимізувати мій погляд на небо. Звідти це був лише питання часу... Кожна пташка GPS має час орбіти близько дванадцяти годин, тому в декількох випадках мені довелося чекати до двох годин у певному місці, щоб достатня кількість їх стала видимою. Мій GPS пристрій автоматично обчислює PDOP і відображає кількість доступних супутників. Таким чином, значення PDOP ніколи не було настільки низьким, як я хотів би, але він впав достатньо, щоб нарешті бути в допустимих межах. Наступного разу я можу відправити постачальника для такого проекту!
СПРОБУЙ ЦЕ!
Trimble, провідний виробник GPS-приймачів, пропонує програмне забезпечення для планування місій GPS для безкоштовного завантаження. Ця діяльність познайомить вас з можливостями програмного забезпечення та підготує вас відповісти на питання про планування місій GPS пізніше.
(Програмне забезпечення для планування місій - це програма Windows (.exe). Користувачі Mac, а також користувачі Windows див. під нумерованими кроками.)
- Відвідайте веб-сайт Trimble
- Завантажте програмне забезпечення для планування Trimble, встановіть його на свій комп'ютер (зверніть увагу, де він встановлює загальні файли) та запустіть програму.
- Встановити альманах: У меню Альманаху наведіть курсор на Імпорт і в підменю виберіть Альманах | перейдіть до папки, де були встановлені Загальні файли | виберіть almanac.alm і натисніть кнопку Відкрити | натисніть кнопку OK.
(Якщо ваша операційна система Windows встановлена на вашому C-диску, то ім'я шляху до файлу almanac.alm ймовірно виглядає так, з або без «(x86)»:
C: Program Files (x86) Загальні FileStrimblePlanning) - Виберіть пункт Файл | Станція... Виберіть місце, в якому ви можете планувати місію GPS.
- Виберіть Супутник | Інформація для вивчення характеристик активних супутників GPS, ГЛОНАСС та WAAS.
- Виберіть Graphs | DOP | DOP - позицію, щоб побачити, як комбіновані HDOP та VDOP змінюються протягом вибраного 24-годинного періоду у вибраному вами місці. Чи можете ви визначити найкращий і найгірший час доби для роботи GPS?
Хоча Trimble все ще надає безкоштовно програмне забезпечення для планування, яке ви використовували вище, вони не включають доступ до сучасного альманаху (інформація про наявні в даний час супутники). Можливо, ви помітили, що альманах, який ви завантажили, був з 2010 року.
Однак, якщо ви перейдете сюди, ви знайдете інтерактивний інтерфейс, який надає вам доступ до більш поточної версії тієї ж функціональності, що і додаток для планування, який використовується вище.
ПРАКТИКА ВІКТОРИНИ
Зареєстровані студенти штату Пенн повинні повернутися зараз до папки Chapter 5 в ANGEL (через меню Ресурси ліворуч), щоб пройти тест самооцінки про джерела помилок GPS. Ви можете приймати практичні вікторини стільки разів, скільки хочете. Вони не забиваються і ніяк не впливають на вашу оцінку.
5.22. Виправлення помилок GPS
Різноманітні фактори, включаючи годинник у супутниках та приймачах, атмосферу, орбіти супутника та відбивні поверхні біля приймача, погіршують якість координат GPS. Розташування супутників на небі може погіршити ситуацію (умова називається розрідженням точності). Для фільтрації помилок позиціонування були розроблені різноманітні методи. Випадкові помилки можна частково подолати, просто усереднивши повторні виправлення в тому ж місці, хоча це часто не дуже ефективне рішення. Систематичні похибки можна компенсувати моделюванням явища, що викликає помилку, і прогнозуванням величини зсуву. Деякі помилки, такі як багатопроменеві помилки, спричинені, коли сигнали GPS відбиваються від доріг, будівель та дерев, змінюються за величиною та напрямком від місця до місця. Інші фактори, включаючи годинник, атмосферу та ексцентриситети орбіти, як правило, створюють подібні помилки на великих ділянках поверхні Землі одночасно. Помилки такого роду можна виправити за допомогою сукупності методик, званих диференціальною корекцією.
У цьому розділі ви навчитеся:
- Пояснити концепцію диференціальної корекції та інші методи, що використовуються для підвищення точності позиціонування GPS; і
- Виконувати диференціальну корекцію, використовуючи дані та послуги Національної геодезичної служби США.
5.23. Диференціальна корекція
Диференціальна корекція - це клас методик підвищення точності GPS-позиціонування шляхом порівняння вимірювань, зроблених двома і більше приймачами. Ось як це працює:
Розташування двох приймачів GPS - одного стаціонарного, одного мобільного - показано нижче. Стаціонарний приймач (або «базова станція») безперервно фіксує своє фіксоване положення над контрольною точкою. Різниця між фактичним розташуванням базової станції та її розрахунковим розташуванням є мірою помилки позиціонування, що впливає на приймач у цьому місці в кожному конкретному моменті. В даному прикладі базова станція розташована приблизно в 25 кілометрах від мобільного приймача (або «ровера»). Оператор мобільного приймача переміщається з місця на місце. Оператор може записувати адреси для бази даних E-911, або дерева, пошкоджені зараженням циганською моллю, або вуличні ліхтарі, що підтримуються відділом громадських робіт
Базова станція GPS закріплена над контрольною точкою, тоді як приблизно за 25 км мобільний GPS-приймач використовується для вимірювання ряду позицій.
На ілюстрації нижче показані позиції, розраховані в ту саму мить (3:01 вечора) базовою станцією (ліворуч) та мобільним приймачем (праворуч).
Фактичні та розрахункові положення базової станції та мобільного приймача.
Базова станція розраховує корекцію, необхідну для усунення помилки в положенні, розрахованому на цей момент, за сигналами GPS. Пізніше корекція застосовується до положення, розрахованого мобільним приймачем в ту ж мить. Виправлене положення не є абсолютно точним, оскільки види та величини помилок, що впливають на два приймачі, не однакові, і через низьку частоту коду синхронізації GPS.
Виправлення помилок, розрахованих на базовій станції, застосовується до положення, розрахованого мобільним приймачем.

Базова станція GPS використовується для диференціальної корекції. Зверніть увагу, що антена розташована безпосередньо над пам'ятником контрольного пункту.
5.24. Диференціальна корекція реального часу
Щоб диференціальна корекція працювала, фікси, записані мобільним приймачем, повинні бути синхронізовані з фіксами, записаними базовою станцією (або станціями). Ви можете надати власну базову станцію або використовувати сигнали корекції, отримані від опорних станцій, що підтримуються Федеральним управлінням авіації США, Береговою охороною США або іншими державними установами або приватними службами підписки. З огляду на необхідне обладнання і наявні сигнали, синхронізація може відбуватися відразу («в режимі реального часу») або після факту («пост-обробка»). Спочатку розглянемо диференціал в реальному часі.
Приймачі з підтримкою WAAS є недорогим прикладом диференціальної корекції в реальному часі. «WAAS» розшифровується як система збільшення широкої площі, колекція з близько 25 базових станцій, створених для поліпшення позиціонування GPS на злітно-посадкових смугах аеропорту США до того, що GPS може бути використаний для допомоги наземних літаків (Федеральне управління авіації США, 2007c). Базові станції WAAS передають свої вимірювання на головну станцію, де розраховуються поправки, а потім підключаються до двох геосинхронних супутників (планується 19). Потім супутник WAAS транслює диференціально скориговані сигнали на тій же частоті, що і сигнали GPS. Сигнали WAAS компенсують похибки позиціонування, виміряні на базових станціях WAAS, а також виправлення помилок годинника та регіональні оцінки помилок верхньої атмосфери (Yeazel, 2003). Приймачі з підтримкою WAAS виділяють один або два канали для сигналів WAAS і здатні обробляти виправлення WAAS. Мережа WAAS була розроблена таким чином, щоб забезпечити приблизно 7-метрову точність рівномірно по всій території обслуговування США.
DGPS: Берегова охорона США розробила подібну систему, яка називається Диференціальна служба глобального позиціонування. Мережа DGPS включає близько 80 мовних сайтів, кожен з яких включає базову станцію опитування та передавач «радіомаячок», який транслює сигнали корекції на частоті 285-325 кГц (трохи нижче радіодіапазону AM). GPS-приймачі з підтримкою DGPS включають підключення до радіоприймача, який може налаштовуватися на один або кілька вибраних «маяків». Призначений для навігації в морі біля узбережжя США, DGPS забезпечує точність не гірше 10 метрів. Стефані Браун (особисте спілкування, осінь 2003) повідомила, що там, де вона працює в Грузії, «з хорошим сузір'ям супутників над головою, [точність DGPS] зазвичай становить 4,5 до 8 футів».
Диференціальна корекція в режимі реального часу в режимі реального часу може бути досягнута за допомогою методу, званого кінематичним (RTK) GPS в реальному часі. За словами геодезиста Лаверна Хенлі (особисте спілкування, осінь 2000), «кінематика в реальному часі вимагає радіочастотного зв'язку між базовою станцією та ровером. Таким чином я досяг кращої, ніж сантиметрова точність, хоча прилад є образливим і вимагає великої майстерності з боку оператора. Кілька разів я виявив, що у мене є чудова геометрія GPS, але втратив посилання на базову станцію. Трапилося і навпаки, коли я хотів записати позиції і мав радіозв'язок назад до базової станції, але геометрія GPS була поганою».
5.25. Пост-оброблені диференціальні виправлення
Кінематичне позиціонування може забезпечити точність 1 частини в 100,000 до 1 частини в 750 000 з відносно короткими спостереженнями лише одну-дві хвилини кожен. Для застосувань, які вимагають точності 1 частини в 1000000 або вище, включаючи контрольні дослідження та вимірювання рухів тектонічних плит Землі, потрібне статичне позиціонування (Van Sickle, 2001). При статичному GPS-позиціонуванні два або більше приймачів вимірюють свої позиції з фіксованих місць протягом періодів від 30 хвилин до двох годин. Приймачі можуть розташовуватися на відстані до 300 км один від одного. Для такого високоточного статичного позиціонування підходять лише двочастотні диференціальні приймачі фази несучої фази, здатні вимірювати різницю у часі прибуття цивільного сигналу GPS (L1) та зашифрованого військового сигналу (L2).
CORS і OPUS: Національна геодезична зйомка США (NGS) підтримує послугу користувача онлайн-позиціонування (OPUS), яка дозволяє геодезистам диференціально коректувати статичні вимірювання GPS, отримані за допомогою одного двочастотного диференціального приймача фази несучої після повернення з поля. Користувачі завантажують вимірювання в стандартному форматі Receiver Independent Exchange (RINEX) на комп'ютери NGS, які виконують диференціальні поправки, посилаючись на три обрані базові станції, вибрані з мережі безперервно діючих опорних станцій. NGS контролює дві мережі CORS; одна складається з 600 власних базових станцій, інша - кооператив державних та приватних агентств, які погоджуються ділитися своїми даними базових станцій та підтримувати базові станції відповідно до специфікацій NGS.
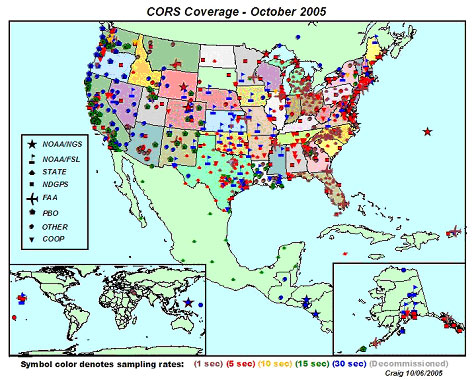
Мережа безперервно діючих опорних станцій (CORS) (Snay, 2005)
На карті вище показано розподіл об'єднаних національних та кооперативних мереж CORS. Зверніть увагу, що символи станції пофарбовані для позначення частоти дискретизації, з якою зберігаються дані базової станції. Через 30 днів всі станції повинні зберігати дані базової станції лише з кроком 30 секунд. Ця політика обмежує коригування OPUS статичним позиціонуванням (хоча точність довших кінематичних спостережень також може бути покращена). Пам'ятаючи про те, що попит на статичний GPS неухильно знижується, майбутні плани NGS включають потокове передавання даних базових станцій CORS для використання в режимі реального часу в кінематичному позиціонуванні.
СПРОБУЙ ЦЕ!
Ця необов'язкова діяльність (внесена Крісом Піберном з CompassData Inc.) проведе вас через процес диференціально коригуючих статичних вимірювань GPS за допомогою служби онлайн-позиціонування NGS (OPUS), яка відноситься до мережі безперервно працюючих еталонних станцій (CORS).
Контекст - це проект CompassData, який передбачав диференціальне GPS-обстеження несучої фази у віддаленому дослідницькому районі на Алясці. Мета полягала в тому, щоб оглянути набір з дев'яти наземних контрольних точок (GCP), які згодом будуть використані для ортокорекції супутникових знімків клієнта. Настільки віддалена ця область, що на момент виконання проекту не було доступне жодного контрольного пункту NGS. Альтернативою було створення базової станції для проекту та фіксації її положення саме з посиланням на станції CORS, що експлуатуються в інших місцях Аляски.
Команда проекту вилетіла на вертольоті на вершину пагорба, розташовану в центрі досліджуваної області. З деякими труднощами вони забили арматуру 18 дюймів #5 у кам'янистий грунт, щоб служити пам'ятником контролю. Після налаштування приймача базової станції GPS над арматурою вони полетіли, щоб почати збір даних зі своїм приймачем ровера. Завдяки сприятливій погоді Кріс та його команда зібрали дев'ять необхідних фотоідентифікованих GCP у перший день. Центрально розташована базова станція дозволила команді мінімізувати відстані між базою та ровером, що означало, що вони могли мінімізувати час, необхідний для фіксації кожного GCP. Наприкінці дня команда виробила п'ять годин даних GPS на базовій станції та дев'ять п'ятнадцятихвилинних занять на GCP
Як і слід було очікувати, необроблені дані GPS були недостатньо точними, щоб відповідати вимогам проекту. (Різні джерела випадкових та систематичних помилок, які сприяють невизначеності даних GPS, розглядаються в інших місцях цього розділу.) Зокрема, забитий у вершину пагорба пам'ятник був непридатним для використання в якості контрольного пункту, оскільки невизначеність, пов'язана з його положенням, була занадто великою. Першим кроком команди проекту у видаленні помилок позиціонування було подальша обробка даних за допомогою програмного забезпечення для обробки базових ліній, яке регулює обчислені базові відстані (між базовою станцією та дев'ятьма GCP) шляхом порівняння фази хвилі несучої GPS, коли вона прибула одночасно на обох базових станціях і марсохід. Наступним кроком було зафіксувати положення базової станції саме по відношенню до станцій CORS, що працюють в інших місцях Аляски.
Наступні кроки допоможуть вам через процес подання п'яти годин даних двочастотної базової станції до Служби онлайн-позиціонування користувачів (OPUS) Національного геодезичного обстеження США та інтерпретації результатів. (Для отримання інформації про OPUS дивіться тут)
1. Завантажте файл даних GPS. Стиснутий файл формату RINEX має розмір приблизно 6 Мб і займе близько 1 хвилини для завантаження через високошвидкісний DSL або кабель, або близько 15 хвилин через модем 56 Кбіт/с. Якщо ви не можете завантажити цей файл, зв'яжіться зі мною відразу, щоб ми могли допомогти вам вирішити проблему.
- WILD282u.zip (5.8 Мб)
GPS-приймачі виробляють дані у фірмових форматах своїх виробників. NGS вимагає, щоб дані GPS були перетворені у формат «RINEX незалежного приймача» (RINEX) для сумісності з OPUS. Більшість програмних пакетів, які постачаються разом із самими блоками GPS, мають вбудовану утиліту для перетворення даних GPS у формат RINEX. Сама NGS використовує безкоштовне програмне забезпечення для перетворення, надане некомерційним консорціумом, який фінансується урядом під назвою UNAVCO.
2. Вивчіть файл RINEX.
- Витягніть файл RINEX «Wild282U.05o» зі свого ZIP-архіву.
- Відкрийте «Wild282U.05O» за допомогою блокнота Microsoft або WordPad. (WordPad робить кращу роботу зі збереження стовпців тексту в цьому випадку. Встановіть слово wrap у значення off.) Або скористайтеся іншим текстовим редактором. (У будь-якому відкритому вікні текстового редактора у діалоговому вікні «Файл» > «Відкрити» переконайтеся, що для параметра «Файли типу:» встановлено значення «Усі файли», щоб у списку було вказано цільовий файл.)
Файл спостереження RINEX містить всю інформацію про сигнали, які приймач базової станції CompassData відстежував під час обстеження на Алясці. Пояснення всього вмісту файлу виходить далеко за рамки цієї діяльності. Наразі зверніть увагу на лінії, які розкривають тип антени, приблизне положення антени та висоту антени. Ви повідомите про ці параметри OPUS на наступному кроці.
3. Надсилання даних GPS до OPUS
- Наведіть браузер на домашню сторінку OPUS і введіть інформацію, необхідну для того, щоб «Завантажити файл даних».
- (КРОК OPUS 1) Натисніть кнопку Огляд, щоб викликати вікно завантаження файлу. Перейдіть до і завантажте файл RINEX, який ви завантажили раніше. Щоб впорядкувати ваше подання, виберіть стиснений архів «WILD282u.zip».
- (Крок OPUS 2) Виберіть тип антени. Зверніться до рядка з написом «ANT #/TYPE» у файлі RINEX, який ви відкрили в текстовому редакторі. Слід знайти антену типу «TPSHIPER_PLUS». Виберіть цей тип зі спадного списку.
- (Крок OPUS 3) Введіть висоту антени над пам'ятником. Зверніться до рядка з написом «АНТЕНА: DELTA H/E/N» у файлі RINEX, який ви відкрили в текстовому редакторі. Перше значення на цій лінії, «1.0854», є H, в метрах. (Див. веб-сайт OPUS для отримання додаткової інформації про висоту антени.)
- (Крок 4 OPUS) Введіть адресу електронної пошти, на яку ви хочете повернути ваші результати.
- (Крок 5 OPUS) Параметри. OPUS дозволяє користувачам вказувати зону системи координат площини стану, вибирати або виключати певні опорні станції CORS, запитувати стандартний або розширений вихід, а також встановити профіль користувача для використання з майбутніми завданнями. Для цієї дії ніяких змін до налаштувань за замовчуванням не потрібно.
- (Крок 6 OPUS) Натисніть кнопку «Завантажити в STATIC», щоб подати дані для диференціальної корекції стосовно трьох контрольних станцій CORS. Залежно від того, скільки запитів знаходиться в черзі NGS, результати можуть бути повернуті за лічені хвилини або години. Коли ця активність була перевірена, черга включала лише один запит (див. Вікно нижче, яке з'являється після успішного подання запитів) і результати були повернуті всього за кілька хвилин, але в минулому це зайняло до 10 хвилин.
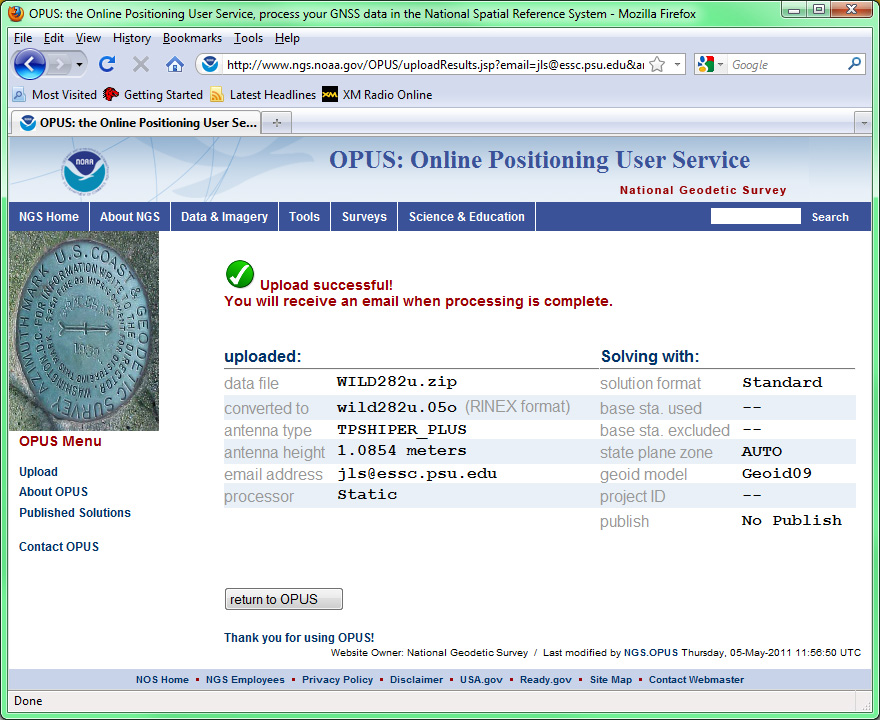
Завантажити звіт про результати, Інтернет-служба позиціонування користувачів, Національна геодезична зйомка США.
Коли ви отримаєте рішення OPUS по електронній пошті, ви захочете виявити величину диференціальної корекції, яку обчислював OPUS. Для цього вам потрібно визначити (а) невиправлену позицію, спочатку обчислену базовою станцією, (б) виправлену позицію, обчислену OPUS, і (c) відстань від позначки до позначки між початковою та виправленою позиціями. На додаток до оригінального файлу RINEX, який ви завантажили раніше, вам знадобиться рішення OPUS і дві безкоштовні програмні утиліти, що надаються NGS. Посилання на ці утиліти наведені нижче.
4. Визначте положення приймача базової станції до диференціальної корекції.
- Зверніться до файлу RINEX «Wild282U.05o», який ви відкрили у текстовому редакторі. У дев'ятому рядку файлу RINEX вказано положення приймача базової станції в координатах Earth-Fixed X, Y, Z. Це тривимірна декартова система координат, походження якої є центром мас Землі (як база NAD 83) .-2389892.2740 -1608765.8567 5672855.7386 ПРИБЛИЗНО ПОЗИЦІЯ XYZ
NGS надає утиліту перетворення для перетворення цих значень X, Y, Z на більш звичні координати широти та довготи та еліпсоїдальних висот.
- Перейдіть до перетворення XYZ в геодезичну конверсію NGS.
- Введіть координати X, Y, Z, знайдені у файлі RINEX. Ваш результат повинен бути:
- Широта = 63°13'53.74280″ Н
- Довгота = 146°03'12.12710″ Вт
- Висота = 1349.2248 м
5. Визначте виправлене положення приймача базової станції. Рішення OPUS, яке ви отримуєте електронною поштою, виправлені координати в Earth-Centered Earth-Fixed X, Y, Z, як географічні координати, а також координати UTM та State Plane. Шукайте координати широти та довготи та еліпсоїдальної висоти, які вказані відносно бази NAD 83. Вони повинні бути дуже близькі до:
- Широта = 63°13'53.73892″ Н
- Довгота = 146°03'11.98942″ Вт
- Висота = 1348.756 м
6. Обчисліть різницю між початковою та виправленою позиціями базової станції. NGS надає ще одну програмну утиліту для обчислення тривимірної відстані між двома позиціями. На відміну від попереднього XYZ в GEODETIC конвертер, однак, «invers3d.exe» - це програма, яку ви завантажуєте на свій комп'ютер.
- Завантажити «invers3d.exe»
- Двічі клацніть на назві файлу, щоб запустити програму, і виберіть параметр геодезичних координат.
- Звертаючи пильну увагу на необхідні формати, введіть невиправлені широту, довготу та еліпсоїдальні висоти, які ви обчислювали на кроці 4 вище.
- Далі знову виберіть опцію геодезичних координат, введіть виправлені координати та висоту, які ви розрахували на кроці 5.
- Серед результатів шукайте розрахункову «відстань від позначки до позначки». Це величина корекції OPUS.
ПРАКТИКА ВІКТОРИНИ
Зареєстровані студенти штату Пенн повинні повернутися зараз до папки Chapter 5 в ANGEL (через меню Ресурси ліворуч), щоб пройти тест самооцінки про виправлення помилок GPS. Ви можете приймати практичні вікторини стільки разів, скільки хочете. Вони не забиваються і ніяк не впливають на вашу оцінку.
5.26. Резюме
Позиції є основним елементом географічних даних. Набори позицій утворюють особливості, так як літери на цій сторінці утворюють слова. Позиції виробляються актами вимірювання, які сприйнятливі до помилок людини, навколишнього середовища та приладів. Похибки вимірювань не можуть бути усунені, але систематичні похибки можна оцінити та компенсувати.
Геодезисти використовують спеціалізовані прилади для вимірювання кутів і відстаней, з яких розраховують горизонтальне і вертикальне положення. Глобальна система позиціонування (і в потенційно більшій мірі, нова Глобальна навігаційна супутникова система) дозволяє як геодезистам, так і звичайним громадянам визначати позиції шляхом вимірювання відстані до трьох або більше супутників на орбіті Землі. Як ви читали в цьому розділі (і, можливо, відомо з особистого досвіду), технологія GPS тепер конкурує з електрооптичними пристроями позиціонування (тобто «тахеометри», які поєднують оптичні вимірювання кута та електронні прилади вимірювання відстані) як за вартістю, так і за продуктивністю. Це викликає питання: «Якщо GPS-приймачі опитування можуть видавати точкові дані з точністю до сантиметра, чому електрооптичні пристрої позиціонування все ще так широко використовуються?» У листопаді 2005 року я поставив це питання двом експертам-Яну Ван Серпу та Білу Зубоклу, чиї роботи я використовував як посилання під час підготовки цієї глави. Я також насолоджувався плідною дискусією з досвідченим студентом на ім'я Шон Хейле (осінь 2005). Ось що вони повинні були сказати:
Ян Ван Серп, автор GPS для геодезистів та основних координат ГІС, пише:
Загалом можна сказати, що вартість хорошої загальної станції (комбінація EDM та теодоліту) схожа на вартість хорошого GPS-приймача «класу обстеження». Хоча новий GPS-приймач може коштувати трохи більше, є, безумовно, угоди, які будуть мати для хороших використовуваних приймачів. Однак у багатьох випадках система RTK, яка може запропонувати виробництво, подібне до EDM, вимагає двох GPS-приймачів, і там, очевидно, рівняння витрат не витримує. У такому випадку EDM коштує дешевше.
Тим не менш, це ще не вся історія. За деяких обставин, таких як великі топографічні зйомки, виробництво RTK GPS перевершує EDM незалежно від різниці у вартості обладнання. Пам'ятайте, вам потрібна лінія видимості з EDM. Звичайно, якщо топографічне обстеження стає занадто великим, економічно вигідніше виконати роботу з фотограмметрією. І якщо він стає дійсно великим, найбільш економічно ефективним є використання супутникових знімків і технології дистанційного зондування.
Тепер поговоримо про точність. Важливо пам'ятати, що GPS не в змозі забезпечити ортометричні висоти (висоти) без геоїдної моделі. Моделі Geoid постійно вдосконалюються, але далекі від досконалості. EDM, з іншого боку, не має таких труднощів. При належних процедурах він повинен мати можливість забезпечити ортометричні висоти з дуже хорошою відносною точністю на локальній території. Але важливо пам'ятати, що відносна точність над локальною територією з лінією видимості, необхідною для хорошого виробництва (EDM), застосовується до деяких обставин, але не до інших. Оскільки площа збільшується, оскільки лінія зору є премією, і потрібна більш абсолютна точність, перевага GPS збільшується.
Слід також зазначити, що ідея про те, що GPS може забезпечити точність рівня см, завжди повинна обговорюватися в контексті питання, «щодо якого контролю та на якій базі?»
У відносному відношенні, на місцевій території, використовуючи хороші процедури, можна, звичайно, сказати, що EDM може давати результати, що перевершують GPS в ортометричних висотах (рівнях) з певною послідовністю. Це моя думка, що ця ідея є причиною того, що це рідко для геодезиста, щоб зробити детальну будівельну ставку з GPS, тобто бордюр і жолоб, каналізація, вода і т.д. з іншого боку, це часто для геодезистів, щоб зробити ставку на кути власності з GPS на місці розвитку, і інші особливості, де вертикальні аспект не є критичним. Справа не в тому, що GPS не може забезпечити дуже точні висоти, це просто те, що для цього потрібно більше часу та зусиль, щоб зробити це за допомогою цієї технології порівняно з EDM у цій конкретній області (вертикальний компонент).
Це, безумовно, правда, що GPS не підходить для всіх геодезичних додатків. Однак не існує технології геодезичної зйомки, яка б добре підходила для всіх геодезичних додатків. З іншого боку, я вважаю, що важко було б зробити так, щоб будь-яка геодезична технологія застаріла. Іншими словами, кожна система має сильні та слабкі сторони, і це стосується і GPS.
Білл Зухілл, професор кафедри геоекологічних наук та інженерії Університету Вілкса, написав:
GPS настільки ж точний на невеликій відстані і більш точний на великих відстанях, ніж електрооптичне обладнання. Вартість GPS падає і може бути не набагато більше, ніж електрооптичний прилад високого класу. GPS добре підходить для всіх геодезичних додатків, хоча для невеликої посилки (менше акра) традиційні інструменти, такі як загальна станція, можуть виявитися швидше. Це залежить від наявності локальних довідкових ділянок (контрольних) і вимог системи координат до системи координат зйомки.
Більшість GPS-одиниць обстеження класу (подвійна частота) можуть досягти точності сантиметрового рівня з досить коротким часом занять. У випадку RTK це може становити лише п'ять секунд при належному спілкуванні з мовленням «базою». Субсантиметрові точності - це ще одна історія. Для досягнення субсантиметра, який більшості геодезистів не потрібен, потрібно набагато більше часу занять, що не сприяє «виробничій» роботі в бізнес-середовищі. Більшість субсантиметрових додатків використовуються для досліджень, більшість з яких відносяться до категорії геологічних деформацій. Я використовую двочастотний GPS протягом останніх восьми років в Єллоустонському національному парку, вивчаючи деформацію Йеллоустонської кальдери. Для досягнення субсантиметрових результатів нам потрібно щонайменше 4-6 годин часу заняття в кожній точці уздовж попереку.
Шон Хейл, співробітник служби парків США в Національному парку Сіон, обов'язки якого включають роботу ГІС та GPS, приймає питання з деякими з цих заяв, а також з деякими матеріалами глави. Будучи студентом цього класу восени 2005 року, Шон писав:
Порівняння доступних продуктів від [одного виробника] показує, що традиційні технології дозволяють досягти точності 3 мм. В ідеальних умовах найсучасніше GPS-обладнання може знизити точність лише до 5 мм, а реальні результати, ймовірно, ближче до 10 мм. Це правда, що GPS часто є більш швидким і простішим у використанні технології в цій галузі порівняно з електрооптичними рішеннями, і з порівнянними рівнями точності витіснив традиційні методи. Якщо геодезист повинен бути точним до мм, однак, електрооптичні інструменти більш точні, ніж GPS.
Немає ніякого способу, що ви можете придбати субсантиметрову одиницю де завгодно за 1000-2000 доларів. Так, ціни падають, але лише недавно (останні три роки) ви навіть могли придбати одноканальний блок GPS з точністю до 10 000 доларів. Одиниці, які ви згадуєте в розділі за $1000-2000, вони будуть «продавати свого найближчого роду» дорого протягом того ж періоду часу. Я не займаюся вимірюванням тектонічних плит, але я маю справу з оглядом та картографуванням класу диференціальної корекції GPS-одиниць щодня, тому я можу говорити з досвіду на цьому.
І відповідь Білла, що GPS добре підходить для всіх додатків обстеження? Ну я щиро благаю відрізнятися. GPS погано підходить для геодезичних робіт там, де обмежений огляд горизонту. Можна було чекати вічно і ніколи не отримати необхідну кількість SVs. Навіть з плануванням місії. Перешкоди, такі як високе покриття навісу, високі будівлі, великі скельні стіни... все це може призвести до високих багатопроменевих помилок, які можуть зіпсувати дані найкращих GPS-пристроїв. Жодна з цих речей не впливає на EDM. Так, ви можете подолати погані умови збору GPS (до певної міри), компенсуючи свою точку від місця, де сигнал хороший, але коли ви це робите, ви робите точні вимірювання (відстань, кут), які ви робите з EDM, за винятком інструменту, який не підходить для цієї програми!
Глобальна навігаційна супутникова система (GNSS) може врешті-решт подолати деякі обмеження GPS-позиціонування. Тим не менш, ці експерти, схоже, погоджуються з тим, що як GPS, так і методи електрооптичної зйомки тут залишаються.
ВІКТОРИНА
Зареєстровані студенти штату Пенн повинні повернутися зараз до папки Chapter 5 в ANGEL (через меню Ресурси ліворуч), щоб отримати доступ до оціненої вікторини для цієї глави. Це один враховує. Ви можете взяти оцінені вікторини лише один раз.
Мета вікторини полягає в тому, щоб переконатися, що ви уважно вивчили текст, що ви освоїли практичну діяльність, і що ви виконали навчальні цілі глави. Ви можете переглянути главу під час вікторини.
Після того, як ви надіслали вікторину та опублікували будь-які питання, які можуть виникнути на наших дискусійних форумах або сторінках глав, ви завершите главу 5.
КОМЕНТАРІ ТА ПИТАННЯ
Зареєстровані студенти можуть залишати коментарі, запитання та відповіді на запитання щодо тексту. Особливо вітаються анекдоти, які пов'язують текст глави з вашим особистим або професійним досвідом. Крім того, в системі управління курсами ANGEL доступні дискусійні форуми для коментарів і питань на теми, якими ви, можливо, не захочете ділитися з усім світом.
Щоб залишити коментар, прокрутіть вниз до текстового поля під «Опублікувати новий коментар» і почніть вводити текст у текстовому полі, або ви можете відповісти на існуючу гілку. Коли ви закінчите вводити текст, натисніть кнопку «Попередній перегляд» або «Зберегти» (Зберегти фактично надішле ваш коментар). Після того, як ваш коментар буде опублікований, ви зможете редагувати або видаляти його за потребою. Крім того, ви зможете відповісти на інші публікації в будь-який час.
Примітка: перші кілька слів кожного коментаря стають його «заголовком» у гілці.
5.27. Бібліографія
Брінкер, Р.К. & Вольф, П.Р. (1984). Елементарна геодезія (7-е видання). Нью-Йорк: Харпер і Роу.
Дана, П.Г. (1998). Огляд системи глобального позиціонування. Ремісничий проект географа. Отримано 2 серпня 1999 року з www.colorado.edu/географія/gcraft/примітки/gps/gps_f.html
Дойл, Д.Р. (1994). Розробка національної системи просторової прив'язки. Отримано 10 лютого 2008 р., з http://www.ngs.noaa.gov/PUBS_LIB/develop_NSRS.html
Федеральний комітет геодезичного контролю (1988). Геометричні геодезичні стандарти точності та специфікації для використання методів відносного позиціонування GPS. Отримано 10 лютого 2008 р., зwww.ngs.noaa.gov/FGCS/Tech_Pub/Geomgeod.pdf Отримано 14 вересня 2013 р., відDocs.lib.noaa.gov/noaa_документи/ніс/nogs/geom_geod_accu_standards.pdf
Холл, Г.В. (1996). Диференціальна служба GPS-навігації USCG. Отримано 9 листопада 2005 р., з http://www.navcen.uscg.gov/pdf/dgps/dgpsdoc.pdf
Ходжсон, К.В. Вимірювальна база з інварною стрічкою. Стрічка ведеться. Базова лінія і астро партія, бл. 1916 р. Колекція історичних фотографій NOAA (2004). Отримано 20 квітня 2006 року з http://www.photolib.noaa.gov/.
Херн, Дж. (1989). GPS: Керівництво до наступної утиліти. Саннівейл, Каліфорнія: Trimble Навігація ТОВ
Херн Дж. (1993). Диференціальний GPS пояснив. Саннівейл, Каліфорнія: Trimble Навігація ТОВ
Монмоньє, М. Прикордонні судові спори та карта як доказ. У малюванні лінії: казки про карти та картографічні суперечки. Нью-Йорк: Генрі Холт.
Національна геодезична зйомка (п. д.). Отримано 4 листопада 2009 р., з http://www.ngs.noaa.gov
Національна геодезична зйомка (н.д.). Національна геодезична зйомка - CORS, постійно діюча довідкова станція. Отримано 15 серпня 2012 р., з www.ngs.noaa.gov/Cors/
Офіс спільної програми NAVSTAR GPS. Отримано 21 жовтня 2000 р., зgps.losangeles.af.mil/
Норс, Е.Т. (2004). Відстеження нових сигналів з космосу — модернізація GPS і технологія Trimble R-Track. Отримано 9 листопада 2005 року з www.trimble.com/survey_wp_gpssys. aspnav=Колекція -27596 Отримано 14 вересня 2013 р., зwww.geosystems.co.nz/Drupal/Файли/U1/Зображення/Будівництво/R-Track_technology_і_gps_modernization.pdf
Раїс, Е. Серія Макгроу-Хілла в географії: Загальна картографія (2-е изд.). Йорк, Пенсильванія: Компанія Maple Press.
Робінсон, А. та ін. (1995). Елементи картографії (5-е видання). Нью-Йорк: Джон Вілі та сини.
Смітсонівський національний музей авіації та космонавтики (1998). GPS: Нове сузір'я. Отримано 2 серпня 1999 р., з http://www.nasm.si.edu/gps/
Сней, Р. (2005, 13 вересня). Форум користувачів CORS - до позиціонування в режимі реального часу. Презентація Power Point, представлена на форумі користувачів CORS 2005 року, Лонг-Біч, Каліфорнія. Презентація отримано 26 жовтня 2005 року з http://www.ngs.noaa.gov/CORS/Presentations/CORSForum2005/Richard_Snay_Forum2005.pdf
Томпсон, М.М. (1988). Карти для Америки, картографічні продукти Геологічної служби США та інші (3-е видання). Рестон, штат Вірджинія: Геологічна служба США.
Навігаційний центр берегової охорони США (н. д.). Загальні відомості DGPS. Отримано 10 лютого 2008 р., з http://www.navcen.uscg.gov/?pageName=dgpsMainwww.navcen.uscg.gov/
Федеральне управління авіації США (2007a). Часті питання. Отримано 10 лютого 2008 р., з http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/faq/gps/
Федеральне управління авіації США (2007b). Глобальна система позиціонування: як це працює. Отримано 10 лютого 2008 р., з http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/gps/howitworks/
Федеральне управління авіації США (2007c). Система збільшення широкої площі. Отримано 10 лютого 2008 р., з http://www.faa.gov/about/office_org/headquarters_offices/ato/service_units/techops/navservices/gnss/gps/howitworks/
Ван Серп, Дж. GPS для геодезистів. Нью-Йорк: Тейлор і Френсіс.
Ван Серп, Дж. (2004). Основні координати ГІС. Бока-Ратон: Прес CRC.
Вольф, П.Р. & Брінкер, Р.К. (1994). Елементарна геодезія (9-е видання). Нью-Йорк, Нью-Йорк: Видавець коледжу Харпер Коллінз.
Вормлі С. Помилки GPS та оцінка точності вашого приймача. Отримано 20 квітня 2006 року з www.edu-observatory.org/gps/gps_accuracy.html
Єйзел Дж. (2006). WAAS та його відношення до включених ручних GPS-приймачів. Отримано 12 жовтня 2005 р., з http://gpsinformation.net/exe/waas.html