1.8: Виявлення змін
- Page ID
- 37854

Значна зміна навколишнього середовища відбувається в тимчасових і просторових масштабах, що робить його складним і потенційно дорогим для вивчення. Очевидні приклади включають деякі прояви зміни клімату: підвищення температури та танення льоду в Арктиці та тонкі зміни рослинності, що відбуваються по всій Канаді, щоб назвати декілька. Моніторинг цих речей виключно за допомогою польових вимірювань був би неймовірно дорогим або сильно упередженим до населених пунктів, і, коли історичні вимірювання недоступні, неможливо. Тут на допомогу приходять дані дистанційного зондування, оскільки аерофотозйомка та супутникові знімки регулярно зберігаються та каталогізуються, і, таким чином, вони можуть функціонувати як дані минулого, так і сьогодення - доки ми можемо витягти з них необхідну інформацію. Тільки уявіть, щоб відповісти на ці питання з упевненістю, не маючи доступу до даних дистанційного зондування:
- Чи збільшується чи зменшується щорічна площа, спалена лісовими пожежами в Канаді?
- Яка частина Канади потеплить найшвидше?
- Де ще є багаторічний лід в Арктиці, і наскільки швидко ця область скорочується?
Перш ніж ми почнемо використовувати дані дистанційного зондування для виявлення змін навколишнього середовища, корисно розглянути, що ми маємо на увазі під цим - що таке екологічні зміни? Навколишнє середовище постійно змінюється - на вулиці йде сніг, коли я пишу це, і два дні тому не було снігу - це своєрідна зміна навколишнього середовища, але не така, яку більшість людей хочуть виявити та скласти карту з даними дистанційного зондування. Тим не менш, саме такі зміни видно на знімках Землі з космосу, тому, подобається нам це чи ні, ми виявляємо багато неактуальних змін з даними дистанційного зондування. Щоб краще подумати про те, які зміни ми хочемо виявити, а які зміни ми не робимо, одна корисна відмінність - це короткострочна/миттєва зміна та довгострокові/поступова зміна. Іноді ми зацікавлені у пошуку короткострокових змін, тоді як в інший час, коли більше стосуються більш тривалих поступових тенденцій, ми вважаємо це шумом.
Миттєва зміна
Дистанційне зондування може бути ефективним при виявленні миттєвих змін, тобто зміни, які відбуваються між одним отриманням зображення та наступним. Ця зміна не обов'язково може бути миттєвою у строгому сенсі цього слова, але для практичних цілей дистанційного зондування зміна, яка відбувається в період між двома придбаннями зображень, може вважатися «миттєвою». Виявлення таких змін часто робиться досить легко за допомогою візуальної інтерпретації двох зображень, порівнюючи їх пліч-о-пліч, щоб легко визначити області змін. Приклад такого роду порівняння показаний на малюнку 63, який показує зміни в міській місцевості Тайваню між лютим (зліва) та груднем (праворуч) 2002 року. Рослинність (червоні ділянки) в деяких місцях явно змінилася, і так має кілька інших областей. Багато алгоритмів обробки зображень також були розроблені для цієї мети, щоб автоматизувати процес пошуку областей, які змінилися; ми розглянемо їх далі в цьому розділі.

63: Приклад пліч-о-плічного порівняння двох зображень, що показують місто Занзібар у 1995 році (ліворуч) та 2020 (праворуч). Міська експансія, яка сталася в період між двома придбаними зображеннями, може бути ідентифікована візуально або алгоритмічно. Андерс Кнудбі, CC BY 4.0.
поступова зміна
Візуальне або інше порівняння зображень та зображень може бути ефективним для виділення очевидних різких змін, таких як зміни, спричинені міською забудовою, зсувами, лісовими пожежами тощо. Однак більш тонкі зміни, такі як щорічні або десятирічні зміни вологості ґрунту або здоров'я рослинності, або зміна глибини зимового снігового пакета, часто вимагає іншого підходу до виявлення змін, який спирається на кількісний аналіз змін, що спостерігаються на багатьох зображеннях. Особливо це стосується випадків, коли окремі зміни зображення до зображення можуть затемнити більш поступову довгострокову тенденцію через погодні або сезонні моделі. Наприклад, щоб вивчити, як зміни клімату впливають на рослинність в канадській Арктиці, порівняння двох зображень дає, в кращому випадку, знімок років, з яких ці зображення, і в гіршому випадку це просто говорить нам, що рослинності в 2002 році (серпень) більше, ніж було в 1994 році (лютий), який насправді не має нічого спільного зі зміною між двома роками, а скоріше є функцією пори року, кожен образ був придбаний. У будь-якому випадку, такі порівняння зображення до зображення не дуже говорять нам про довгострокову тенденцію. Натомість міра змінної, що цікавить (наприклад, щільність рослинності або здоров'я) повинна бути кількісно оцінена через регулярні проміжки часу протягом тривалого періоду часу для виявлення таких тенденцій. Приклад наведено на малюнку 64, на якому масштаб арктичного морського льоду кількісно оцінювався майже щодня за період 1979 - 2018 рр.

64: Близькоденні оцінки протяжності арктичного морського льоду. Обсяг арктичного морського льоду М.Скотта, Національний центр обробки даних про сніг та льоду (NSIDC), використання та авторське право NSIDC.
Конкретна методологія, яка використовується для виявлення довгострокових поступових змін, повністю залежить від виду змін, про які йдеться (наприклад, зміна рослинності проти морського льоду), тому важко надати детальну інформацію про те, як здійснити виявлення змін у цьому випадку. Однак однією з основних проблем будь-якого такого роду «виявлення тенденцій» є те, що оцінка (наприклад, протяжність морського льоду) повинна бути відносно неупередженою протягом усього періоду спостереження. Іншими словами, рівень морського льоду не повинен бути недооціненим або завищеним у період 1979-1989 років, а також не повинен бути недооціненим або завищеним у 2010-х роках, або в будь-який проміжок між ними. Це важливо, щоб уникнути «виявлення» тенденцій, спричинених упередженістю у збиранні або обробці даних, але насправді не існують.
Відокремлення шуму від фактичної миттєвої зміни
При порівнянні одного зображення з іншим з наміром виявити зміни між ними, основною проблемою є виявлення реальних змін навколишнього середовища, не виявляючи змін, які насправді не відбулися. Як завжди буває у двійковій класифікації (що це приклад), існує чотири можливі комбінації реальності (зміна чи відсутність змін) та оцінки (зміна виявлена проти змін не виявлено, таблиця 14):
Таблиця 14: Двійкову класифікацію (таку, яка включає два категоріальних варіанти) можна описати за допомогою таблиці, подібної до цієї. Для будь-якої системи обробки зображень завдання в двійковій класифікації полягає в оптимізації кількість/швидкості справжніх позитивів і справжніх негативів.
|
Виявлено зміни |
Змін не виявлено |
|
|
Змінити |
Справжній позитив (TP) |
Хибно-негативний (FN) |
|
Без змін |
Хибнопозитивний (FP) |
Справжній негативний (TN) |
Мета, таким чином, полягає в тому, щоб оптимізувати швидкість, з якою виявляються справжні позитиви та справжні негативи. Більшість алгоритмів виявлення змін працюють на основі пікселів за пікселями, тому це означає правильне виявлення пікселів, які насправді змінилися, без неправильного «виявлення» зміни пікселів, які не змінилися. Для цього нам знадобиться спосіб розділити три різні ситуації, кожна з яких може відбуватися в заданому пікселі:
- Без змін: піксель буквально виглядає однаково на кожному зображенні.
- Шум: піксель виглядає по-різному на двох зображеннях, але різниця досить мала, що, ймовірно, викликана факторами, не пов'язаними з реальними змінами навколишнього середовища. Вони можуть включати відмінності в атмосферних умовах між двома зображеннями, випадковий шум на зображеннях, недосконале географічне прив'язку та інші проблеми.
- Фактична зміна: Реальна зміна навколишнього середовища відбулася в пікселі, і це показує суттєву різницю між тим, як піксель виглядає на першому зображенні та на другому зображенні.
Перша ситуація, без змін, трапляється дуже рідко, оскільки є шум, властивий процесу створення зображення, і цей шум навряд чи буде ідентичним між двома різними зображеннями. Справжній виклик, таким чином, полягає в розділенні ситуацій 2) і 3). У цьому беруть участь два принципи.
Зниження шуму
Перш за все, важливо видалити якомога більше джерел шуму, перш ніж порівнювати дані на двох зображеннях. Деякі стратегії, які часто використовуються з цією метою, включають:
- Використовуйте «ювілейні дати». Виберіть два зображення, які були зняті в одну дату (або майже) в різні роки. Це хороший спосіб усунути великі відмінності між кожним зображенням, пов'язані з сезонними змінами вологості ґрунту, стану рослинності, снігового покриву та інших факторів навколишнього середовища, що змінюються з сезонами.
- Використовуйте зображення, зняті одним і тим же датчиком. Враховуючи, що жоден датчик не ідеально відкалібрований, використання зображень з двох різних датчиків потенційно може призвести до різниці, яка базується на датчиках, а не на основі навколишнього середовища. Наприклад, якщо сяйво в спектрі 500-600 нм трохи завищено одним датчиком і трохи занижено іншим датчиком, порівняння зображень між ними може «виявити зміни» там, де їх немає.
- Використовуйте знімки, зняті при подібних атмосферних станах. Це важко, оскільки ми часто не маємо точної інформації про аерозольні навантаження, водяну пару, швидкість вітру тощо, але, безумовно, уникаємо порівняння зображень із очевидними відмінностями в серпанок, видимості та інших видимих атмосферних факторів.
- Порівняйте зображення на основі їх коефіцієнта відбиття поверхні, а не TOA сяйва або коефіцієнта відбиття TOA. Це пояснюється тим, що коефіцієнт відбиття поверхні є фізичним атрибутом поверхні і, принаймні, в принципі не залежить від атмосферного стану та освітленості.
- Для датчиків нахилу, якщо можливо, порівнюйте зображення, зроблені з більш-менш однаковою геометрією.
Визначення порогу
Після того, як якомога більше джерел шуму буде усунуто, а зображення були перетворені на коефіцієнт відбиття поверхні для порівняння, все одно буде певний шум, який змушує значення коефіцієнта відбиття поверхні на двох зображеннях трохи відрізнятися між зображеннями, навіть для пікселів, які не відчували вид змін, які ми хочемо виявити. Тому, щоб розділити ситуації 2) та 3) вище, важливо врахувати, що означає «реальна» зміна навколишнього середовища, і визначити поріг, нижче якого будь-яка «зміна», що спостерігається у порівнянні зображень, вважається «шумом», а не «реальною зміною». Наприклад, уявіть, що ви вивчаєте зміни рослинності, і у вас є два зображення одного і того ж лісу. Справжня зміна, яка сталася між цими двома зображеннями, полягає в тому, що один лист впав з одного з дерев у лісі. Це фактична помітна зміна навколишнього середовища, але в будь-якому реальному сенсі це не гарантує ярлика «вирубка лісів»! Однією з передумов для поділу ситуацій 2) і 3) вище є визначення того, скільки змін потрібно для того, щоб розглянути область «змінена». Якщо у вас немає польових спостережень (а ви зазвичай цього не робите, тому що зміни виявляються назад у часі, і ви не можете піти і отримати дані полів з минулого), це вимагає визначення порогу на основі самих зображень, що, як правило, є інтерактивним і суб'єктивним процесом.
Методи виявлення миттєвих змін
Деякі з найпростіших підходів до виявлення величини змін базуються на «математиці зображень».
Різниця смуги
Наприклад, величину зміни можна визначити як різницю між значеннями відбивання поверхні в смузі 1 на двох зображеннях, плюс різниця в смузі 2 тощо:
Співвідношення смуг
Або співвідношення можна використовувати замість відмінностей:
Евклідова відстань
Найбільш часто використовуваним методом є обчислення «Евклідієвої відстані», використовуючи кожну смугу як вимір, а кожне зображення - як точку. Уявіть, що ви будуєте відображення поверхні кожного зображення як точки в системі координат. Евклідова відстань між ними тоді дорівнювала б:
Для кожного з цих підходів, щоб відокремити шум від реальних змін навколишнього середовища, потрібно визначити порогове значення. Пікселі, які не зазнали змін або змін менше порогового значення, будуть вважатися фактично «незмінними», тоді як ті, які зазнали більших змін, вважатимуться «реальними змінами». Також зауважте, що для кожного з цих підходів кількість смуг, що беруть участь у обчисленні, була обмежена двома у рівняннях вище, але може бути розширена, щоб включити будь-яку кількість смуг, присутніх на зображеннях.
Методи виявлення та атрибуції миттєвих змін
Всі три вищевказані підходи можуть бути ефективними при виявленні змін, але всі вони також страждають від недоліку, який вони дуже мало розповідають нам про зміни, які відбулися в даному пікселі. Хоча виявлення змін є чудовим першим кроком, на основі управлінських рішень непросто, тому з'ясувати трохи більше про те, які зміни були виявлені, які називаються атрибуцією змін, є корисним.
Змінити вектори
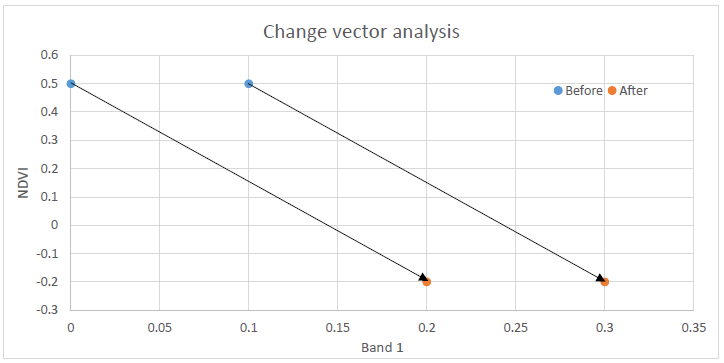
У цьому може допомогти зміна векторів. Векторний аналіз змін є продовженням обчислення евклідієвої відстані, в якому також обчислюється напрямок зміни. Приклад з тільки двома розмірами наведено на малюнку 65. На зображенні «перед» значення відбивання поверхні в смузі 1 дорівнює 0,1, а значення NDVI - 0,5. На зображенні «після» ці значення змінилися на 0,3 та -0,2 відповідно. Це ілюструє дві речі: 1) вам не потрібно використовувати фактичні значення діапазону як вхідні дані для аналізу виявлення змін, і 2) можна знайти напрямок зміни - збільшення відбиття смуги 1, зменшення NDVI.
У векторному аналізі змін величина зміни обчислюється як евклідова відстань, відповідно до рівняння вище. Напрямок зміни можна обчислити в градусах (наприклад, напрямок компаса) або, щоб полегшити інтерпретацію, в основних напрямках: A) вгору і вправо, B) вниз і вправо, C) вниз і вліво, D) вгору і вліво. Якщо використовувані «смуги» можна інтерпретувати змістовно, приписувати зміни може бути легко. Зміни, які передбачають зменшення вегетаційного індексу, передбачають втрату рослинності, тоді як ті, які призводять до підвищення, скажімо, температури поверхні, включають, ну, збільшення температури поверхні (ці два часто йдуть разом, оскільки рослинність допомагає зберегти поверхню прохолодною). Хоча обчислення евклідінової відстані легко, коли в аналізі векторів змін використовується більше двох вимірів - ви просто розширюєте рівняння, щоб містити більше термінів - напрямок зміни стає складнішим для визначення, а категорії зазвичай розробляються для конкретного застосування. Як і у випадку з методами, які просто використовуються для виявлення змін, поріг може бути застосований до величини вектора змін, нижче якого не виявлено «ніяких змін».

65: Приклад аналізу векторів змін лише з двома смугами. NDVI - нормалізований індекс різниці рослинності, більш детально описаний в наступному розділі. Андерс Кнудбі, CC BY 4.0.
66: Одним з недоліків аналізу векторів змін є те, що два однакових вектора змін можуть представляти різні види змін. Андерс Кнудбі, CC BY 4.0.
Одним з недоліків аналізу векторів змін є те, що дві різні зміни можуть мати точно такий же вектор зміни. Для прикладу подивіться на дві стрілки на малюнку 66. Хоча два вектори однакові - вони мають однаковий напрямок і величину - вони, ймовірно, представляють різні види змін, оскільки вони починаються і закінчуються в різних місцях. Таким чином, важко, на практиці часто неможливо, використовувати векторний аналіз змін, щоб конкретно з'ясувати, якою була поверхня до і після зміни.
Виявлення змін після класифікації
Ймовірно, найпростіший спосіб як виявити, так і атрибутувати зміни в області - це провести класифікацію земного покриву на зображенні «до», провести іншу класифікацію земного покриву на зображенні «після», а потім знайти пікселі, які класифікувалися по-різному на двох зображеннях. Хоча це привабливо прямо і може працювати іноді, це підлягає значному недоліку: дуже важко отримати точні результати таким чином. Причина в тому, що жодна класифікація не є досконалою, і при порівнянні двох недосконалих класифікацій помилки поєднуються. Тому я настійно рекомендую уникати цього підходу.
Змінити класифікацію
Якщо ви дійсно хочете знати, якою була змінена область до і після зміни, альтернативою виявленню змін після класифікації є об'єднання всіх смуг з двох зображень в одне зображення. Наприклад, якщо у вас є два зображення, кожне з шести смуг, ви можете «скласти» їх, щоб отримати одне 12-смугове зображення. Це дозволяє запустити єдину класифікацію на 12-смуговому зображенні. З хорошими польовими даними для калібрування цієї класифікації кожен клас може бути визначений відповідно до комбінації наземних покривів до і після. Класифікація може бути контрольованою або неконтрольованою, на основі пікселів або сегментів. Такий підхід дозволяє двом векторам на малюнку 66 опинитися в двох різних класах, де, можливо, один - це перехід від хвойного лісу до болотного, а інший - перехід від листяного лісу до болотного.
Класифікація змін також дозволяє видалити комбінації класів, які неможливі або вкрай малоймовірні, такі як перехід від «океану» до «хвойного лісу» або з «промисловості» на «водно-болотні угіддя». Вирішення того, які комбінації класів до і після є ймовірними, а які малоймовірні в даній області, вимагає певного досвіду, і складні системи виявлення змін часто будуються з використанням комбінації аналізу векторів змін, класифікації змін та таких експертних входів.