11.8: Вектори
- Page ID
- 60416

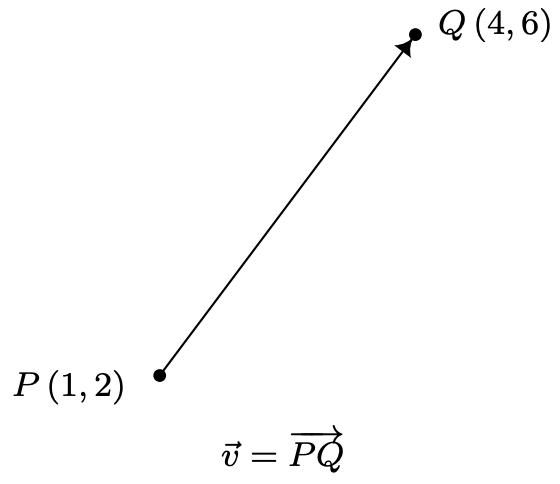
Як ми неодноразово бачили в цій книзі, математику можна використовувати для моделювання та вирішення реальних проблем. Для багатьох застосувань достатньо дійсних чисел; тобто дійсні числа з відповідними одиницями можна використовувати для відповіді на запитання на кшталт «Наскільки близько найближче гніздо Саскватча?» Є й інші часи, коли таких величин не вистачає. Можливо, важливо знати, наприклад, наскільки близько знаходиться найближче гніздо Саскватча, а також напрямок, в якому воно лежить. (Віщує використання підшипників у вправах, можливо?) Щоб відповісти на подібні запитання, які включають як кількісну відповідь, так і величину, разом з напрямком, ми використовуємо математичні об'єкти, які називаються векторами. 1 Вектор представлений геометрично у вигляді спрямованого відрізка лінії, де величина вектора приймається довжиною відрізка лінії, а напрямок стає зрозумілим за допомогою стрілки в одній кінцевій точці відрізка. Звертаючись до векторів у цьому тексті, ми будемо приймати 2 позначення «стрілка», тому символ\(\vec{v}\) читається як «вектор»\(v^{\prime}\). Нижче наведено типовий вектор\(\vec{v}\) з кінцевими точками\(P\) (1, 2) і\(Q\) (4, 6). Точка\(P\) називається початковою точкою або хвостом,\(\vec{v}\) а точка\(Q\) називається кінцевою точкою або головою\(\vec{v}\). Оскільки ми можемо\(\vec{v}\) повністю реконструювати з\(P\) і\(Q\)\(\vec{v}=\overrightarrow{P Q}\), пишемо, де важливий порядок точок\(P\) (початкова точка) і\(Q\) (кінцева точка). (Подумайте про це, перш ніж рухатися далі.)
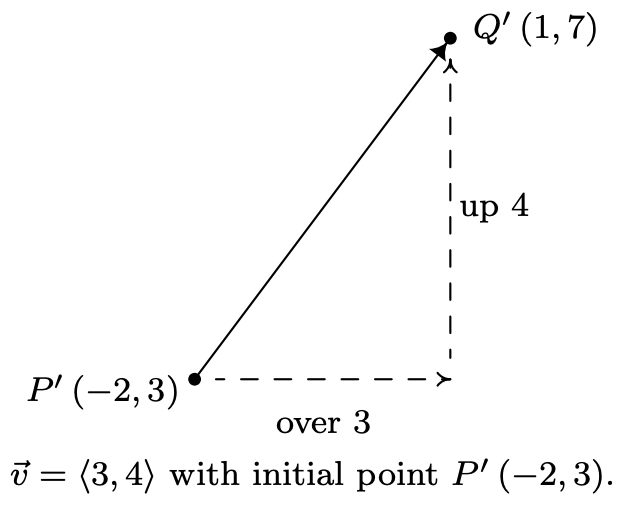
Хоча це правда, що\(P\) і\(Q\) повністю визначити\(\vec{v}\), важливо зазначити, що оскільки вектори визначаються з точки зору їх двох характеристик, величини та напрямку, будь-який спрямований відрізок лінії з тією ж довжиною та напрямком, що і\(\vec{v}\) вважається одним і тим же вектором як\(\vec{v}\), незалежно від його початкової точки. У випадку нашого вектора\(\vec{v}\) вище, будь-який вектор, який рухається на три одиниці вправо і чотири вгору 3 від початкової точки, щоб прийти до кінцевої точки, вважається тим самим вектором, що і\(\vec{v}\). Позначення, яке ми використовуємо для захоплення цієї ідеї, є складовою формою вектора\(\vec{v}=\langle 3,4\rangle\), де перше число, 3, називається\(x\) -компонентом,\(\vec{v}\) а друге число, 4, називається\(y\) -компонентом\(\vec{v}\). Якби ми хотіли реконструювати\(\vec{v}=\langle 3,4\rangle\) з початковою точкою\(P^{\prime}(-2,3)\), то ми б знайти кінцеву точку,\(\vec{v}\) додавши 3 до\(x\) -координати і додати 4 до\(y\) -координати, щоб отримати кінцеву точку\(Q^{\prime}(1,7)\), як показано нижче.
Компонентна форма вектора - це те, що пов'язує ці самі геометричні об'єкти назад до алгебри і, зрештою, тригонометрії. Узагальнюємо наш приклад у нашому визначенні нижче.
Припустимо\(\vec{v}\), представлений спрямованим відрізком лінії з початковою точкою\(P\left(x_{0}, y_{0}\right)\) і кінцевою точкою\(Q\left(x_{1}, y_{1}\right)\). Компонентна форма\(\vec{v}\) задається
\[\vec{v}=\overrightarrow{P Q}=\left\langle x_{1}-x_{0}, y_{1}-y_{0}\right\rangle\nonumber\]
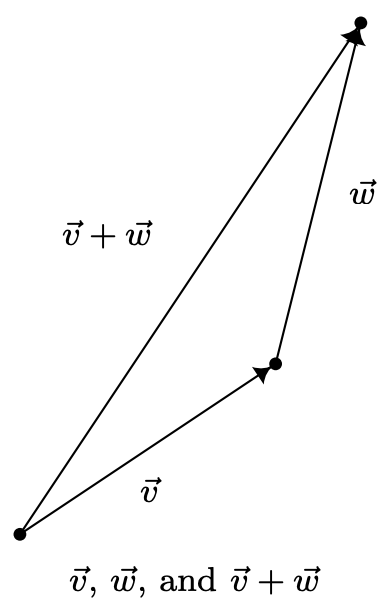
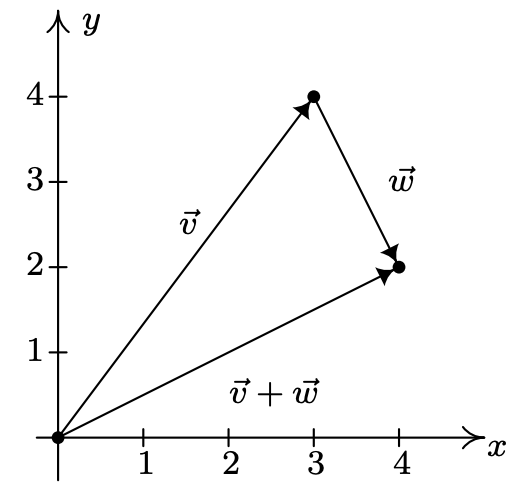
Використовуючи мову компонентів, ми маємо, що два вектори рівні тоді і тільки тоді, коли відповідні їх складові рівні. Тобто,\(\left\langle v_{1}, v_{2}\right\rangle=\left\langle v_{1}^{\prime}, v_{2}^{\prime}\right\rangle\) якщо і тільки якщо\(v_{1}=v_{1}^{\prime}\) і\(v_{2}=v_{2}^{\prime}\). (Знову ж таки, подумайте про це, перш ніж читати далі.) Тепер ми встановимо про визначення операцій над векторами. Припустимо, нам дано два вектори\(\vec{v}\) і\(\vec{w}\). Сума, або результуючий вектор\(\vec{v}+\vec{w}\) виходить наступним чином. По-перше, сюжет\(\vec{v}\). Далі побудуйте\(\vec{w}\) так, щоб його початкова точка була кінцевою точкою\(\vec{v}\). Для побудови вектора\(\vec{v}+\vec{w}\) ми починаємо в початковій точці\(\vec{v}\) і закінчуємо в кінцевій точці\(\vec{w}\). Корисно думати про вектор\(\vec{v}+\vec{w}\) як про «чистий результат» руху уздовж,\(\vec{v}\) а потім рухатися вздовж\(\vec{w}\).
Наш наступний приклад добре використовує результуючі вектори та огляди підшипників та Закон Косинусів. 4
Літак залишає аеропорт з повітряною швидкістю 5 175 миль на годину на підшипнику\(\mathrm{N} 40^{\circ} \mathrm{E}\). Вітер 35 милі на годину дме на підшипник\(\mathrm{S} 60^{\circ} \mathrm{E}\). Знайдіть справжню швидкість літака, округлену до найближчої милі на годину, і справжню несучу площину, округлену до найближчого градуса.
Рішення
Як для площини, так і для вітру нам даються їх швидкості та напрямки. Швидкість зчеплення (як величина) з напрямком - це поняття швидкості, яке ми бачили кілька разів раніше в цьому підручнику. 6\(\vec{v}\) Позначимо швидкість літака і\(\vec{w}\) позначимо швидкість вітру на діаграмі нижче. «Справжня» швидкість і підшипник знаходять шляхом аналізу результуючого вектора,\(\vec{v}+\vec{w}\). З векторної діаграми ми отримуємо трикутник, довжини сторін якого - величина\(\vec{v}\), яка дорівнює 175, величина\(\vec{w}\), яка дорівнює 35, і величина\(\vec{v}+\vec{w}\), яку ми будемо називати\(c\). З наведеної інформації підшипника ми йдемо по звичайній геометрії, щоб визначити, що кут між сторонами довжини 35 і 175 вимірює\(100^{\circ}\).
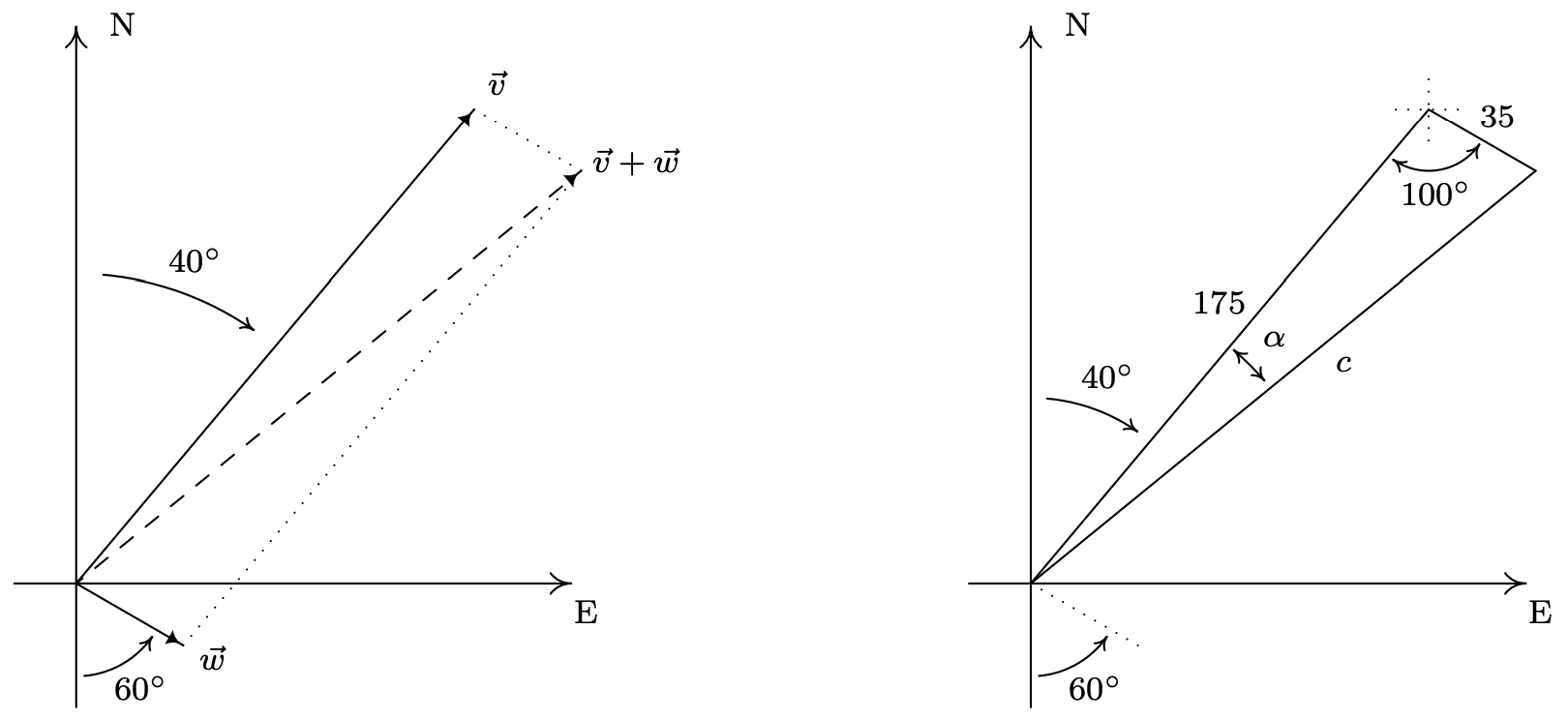
З Закону Косинуса ми визначимо\(c=\sqrt{31850-12250 \cos \left(100^{\circ}\right)} \approx 184\), що означає справжня швидкість літака становить (приблизно) 184 милі на годину. Щоб визначити справжній підшипник площини, нам потрібно визначити кут\(\alpha\). Використовуючи Закон Косинусів ще раз, 7 ми знаходимо\(\cos (\alpha)=\frac{c^{2}+29400}{350 c}\) так\(\alpha \approx 11^{\circ}\). З огляду на геометрію ситуації, додаємо\(\alpha\) до заданого\(40^{\circ}\) і знаходимо істинний підшипник площини, який повинен бути (приблизно)\(\mathrm{N} 51^{\circ} \mathrm{E}\).
Наступним кроком є визначення додавання векторів покомпонентно, щоб відповідати геометричній дії. 8
Припустимо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\), і\(\vec{w}=\left\langle w_{1}, w_{2}\right\rangle\). \(\vec{v}+\vec{w}\)Вектор визначається
\(\vec{v}+\vec{w}=\left\langle v_{1}+w_{1}, v_{2}+w_{2}\right\rangle\)
Нехай\(\vec{v}=\langle 3,4\rangle\) і припустимо\(\vec{w}=\overrightarrow{P Q}\), де\(P(−3, 7)\) і\(Q(−2, 5)\). Знайти\(\vec{v}+\vec{w}\) і інтерпретувати цю суму геометрично.
Рішення
Перш ніж додати вектори за допомогою Definition 11.6, нам потрібно написати\(\vec{w}\) у вигляді компонента. Використовуючи визначення 11.5, отримаємо\(\vec{w}=\langle-2-(-3), 5-7\rangle=\langle 1,-2\rangle\). Таким чином
\ [\ почати {вирівняний}
\ vec {v} +\ vec {w} &=\ лангл 3,4\ діапазон+\ лангл 1, -2\ діапазон\\
&=\ кут 3+1,4+ (-2)\ діапазон\\
&=\ кут 4,2\ діапазон
\ кінець {вирівняний}\ nonumber\]
Щоб візуалізувати цю суму, малюємо\(\vec{v}\) з її початковою точкою в (0, 0) (для зручності) так, щоб її кінцева точка була (3, 4). Далі проводимо графік\(\vec{w}\) з його початковою точкою в (3, 4). Перемістивши одну вправо і дві вниз, знаходимо кінцеву точку\(\vec{w}\) to be (4, 2). Ми бачимо, що вектор\(\vec{v}+\vec{w}\) має початкову точку (0, 0) та кінцеву точку (4, 2), тому його складова форма\(\langle 4,2\rangle\), як потрібно.
Для того, щоб векторне додавання користувалося тими ж властивостями, що і додавання дійсних чисел, необхідно розширити наше визначення векторів, включивши «нульовий вектор»,\(\overrightarrow{0}=\langle 0,0\rangle\). Геометрично\(\overrightarrow{0}\) являє собою точку, яку ми можемо розглядати як спрямований відрізок лінії з однаковими початковими та кінцевими точками. Читач цілком може заперечити проти включення\(\overrightarrow{0}\), так як все-таки вектори повинні мати як величину (довжину), так і напрямок. Хоча здається зрозумілим, що величина\(\overrightarrow{0}\) повинна бути 0, незрозуміло, який її напрямок. Як ми побачимо, напрямок насправді не визначено\(\overrightarrow{0}\), але ця незначна гикавка в природному потоці речей варта переваг, які ми пожинаємо, включивши\(\overrightarrow{0}\) в наші дискусії. У нас є наступна теорема.
- Комутативна властивість: Для всіх векторів\(\vec{v}\) і\(\vec{w}, \vec{v}+\vec{w}=\vec{w}+\vec{v}\).
- Асоціативна властивість: для всіх векторів\(\vec{u}, \vec{v} \text { and } \vec{w},(\vec{u}+\vec{v})+\vec{w}=\vec{u}+(\vec{v}+\vec{w})\).
- Властивість ідентичності: вектор\(\overrightarrow{0}\) діє як адитивна ідентичність для векторного додавання. Тобто для всіх векторів\(\vec{v}\),\[\vec{v}+\overrightarrow{0}=\overrightarrow{0}+\vec{v}=\vec{v}.\nonumber\]
- Зворотна властивість: Кожен вектор\(\vec{v}\) має унікальну добавку, зворотну, позначену\(-\vec{v}\). Тобто для кожного вектора\(\vec{v}\) є свій вектор,\(-\vec{v}\) щоб\[\vec{v}+(-\vec{v})=(-\vec{v})+\vec{v}=\overrightarrow{0}\nonumber\]
Властивості в теоремі 11.18 легко перевіряються за допомогою визначення векторного додавання. 9 Для комутативної власності відзначимо, що якщо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\) і\(\vec{w}=\left\langle w_{1}, w_{2}\right\rangle\) тоді
\(\begin{aligned} \vec{v}+\vec{w} &=\left\langle v_{1}, v_{2}\right\rangle+\left\langle w_{1}, w_{2}\right\rangle \\ &=\left\langle v_{1}+w_{1}, v_{2}+w_{2}\right\rangle \\ &=\left\langle w_{1}+v_{1}, w_{2}+v_{2}\right\rangle \\ &=\vec{w}+\vec{v} \end{aligned}\)
Геометрично ми можемо «побачити» комутативну властивість, розуміючи, що суми\(\vec{v}+\vec{w}\) і\(\vec{w}+\vec{v}\) є тією ж спрямованою діагоналлю, що визначається паралелограмом нижче.
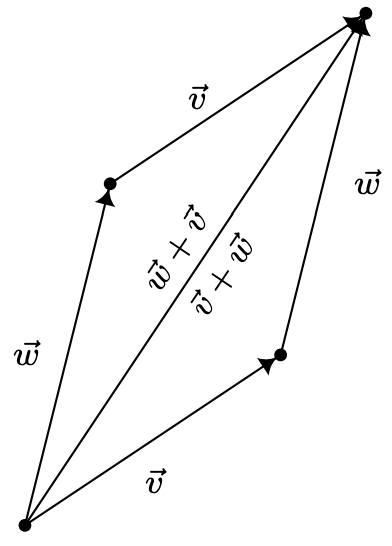 Демонстрація комутативної властивості векторного додавання.
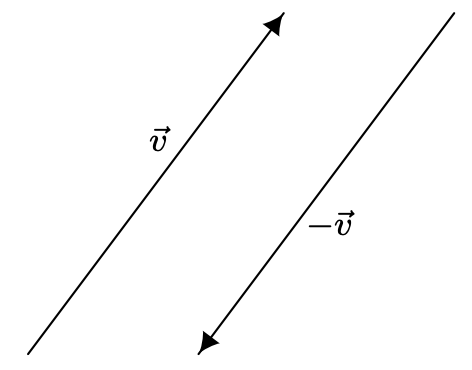
Демонстрація комутативної властивості векторного додавання.Докази асоціативних і ідентичних властивостей протікають аналогічно, і читачеві рекомендується перевірити їх і надати супровідні діаграми. Існування і унікальність адитивної оберненої - це ще одна властивість, успадкована від дійсних чисел. Задано вектор\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\), припустимо, що ми хочемо знайти вектор\(\vec{w}=\left\langle w_{1}, w_{2}\right\rangle\) так, що\(\vec{v}+\vec{w}=\overrightarrow{0}\). За визначенням векторного додавання ми маємо\(\left\langle v_{1}+w_{1}, v_{2}+w_{2}\right\rangle=\langle 0,0\rangle\), а значить,\(v_{1}+w_{1}=0\) і\(v_{2}+w_{2}=0\). Дістаємо\(w_{1}=-v_{1}\) і\(w_{2}=-v_{2}\) так що\(\vec{w}=\left\langle-v_{1},-v_{2}\right\rangle\). Значить,\(\vec{v}\) має добавку зворотну, і більш того, вона унікальна і може бути отримана за формулою\(-\vec{v}=\left\langle-v_{1},-v_{2}\right\rangle\). Геометрично вектори\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\) і\(-\vec{v}=\left\langle-v_{1},-v_{2}\right\rangle\) мають однакову довжину, але протилежні напрямки. В результаті, при геометричному складанні векторів сума\(\vec{v}+(-\vec{v})\) призводить до того, що починається з початкової точки\(\vec{v}\) і закінчується назад у початковій точці\(\vec{v}\), або іншими словами, чистий результат переміщення\(\vec{v}\) потім взагалі не\(-\vec{v}\) рухається.
Використовуючи адитивну обернену вектора, ми можемо визначити різницю двох векторів,\(\vec{v}-\vec{w}=\vec{v}+(-\vec{w})\). Якщо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\) і\(\vec{w}=\left\langle w_{1}, w_{2}\right\rangle\) тоді
\(\begin{aligned} \vec{v}-\vec{w} &=\vec{v}+(-\vec{w}) \\ &=\left\langle v_{1}, v_{2}\right\rangle+\left\langle-w_{1},-w_{2}\right\rangle \\ &=\left\langle v_{1}+\left(-w_{1}\right), v_{2}+\left(-w_{2}\right)\right\rangle \\ &=\left\langle v_{1}-w_{1}, v_{2}-w_{2}\right\rangle \end{aligned}\)
Іншими словами, як і додавання векторів, векторне віднімання працює покомпонентно. Для інтерпретації вектора\(\vec{v}-\vec{w}\) геометрично відзначимо
\(\begin{array}{l} \vec{w}+(\vec{v}-\vec{w}) &=\vec{w}+(\vec{v}+(-\vec{w})) & \text { Definition of Vector Subtraction } \\ &=\vec{w}+((-\vec{w})+\vec{v}) & \text { Commutativity of Vector Addition } \\ &=(\vec{w}+(-\vec{w}))+\vec{v} & \text { Associativity of Vector Addition } \\ &=\overrightarrow{0}+\vec{v} & \text { Definition of Additive Inverse } \\ &=\vec{v} & \text { Definition of Additive Identity } \end{array}\)
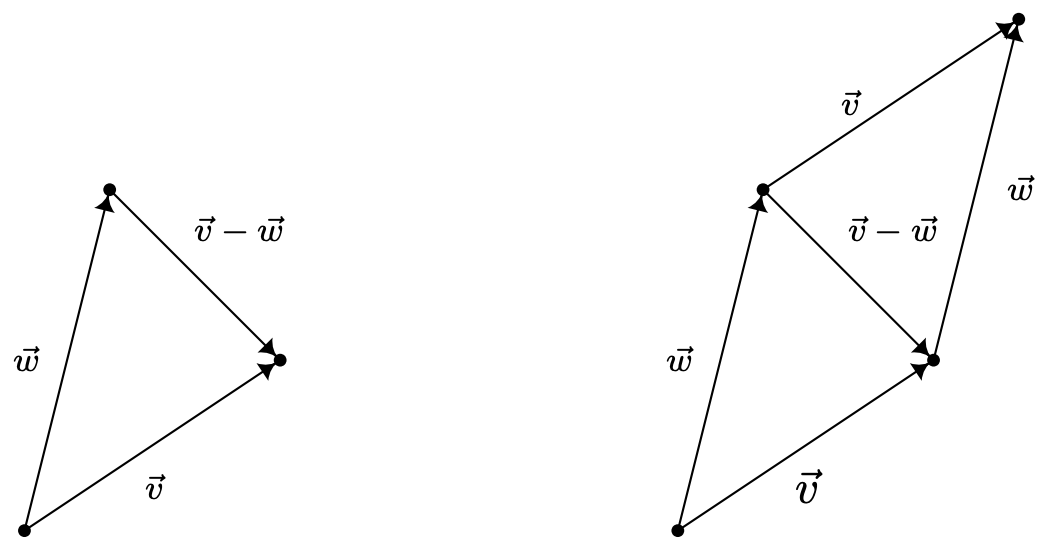
Це означає, що «чистий результат» руху вздовж,\(\vec{w}\) а потім рухається вздовж\(\vec{v}-\vec{w}\), є саме\(\vec{v}\) собою. З наведеної нижче діаграми ми бачимо, що це\(\vec{v}-\vec{w}\) можна інтерпретувати як вектор, початкова точка якого є кінцевою точкою\(\vec{w}\) і кінцевою точкою якого є кінцева точка,\(\vec{v}\) як показано нижче. Також варто згадати, що в паралелограмі визначається векторами\(\vec{v}\) і\(\vec{w}\), вектор\(\vec{v}-\vec{w}\) є однією з діагоналей — інша істота\(\vec{v}+\vec{w}\).
Далі ми обговорюємо скалярне множення — тобто прийняття дійсного числа разів вектора. Ми визначаємо скалярне множення для векторів так само, як ми визначили його для матриць у Розділі 8.3.
Якщо\(k\) є дійсним числом і\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\), визначаємо\(k \vec{v}\) по\[k \vec{v}=k\left\langle v_{1}, v_{2}\right\rangle=\left\langle k v_{1}, k v_{2}\right\rangle\nonumber\]
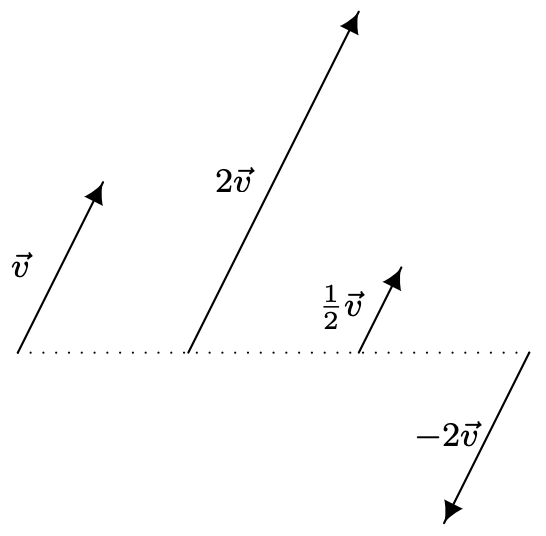
Скалярне множення\(k\) на вектори можна розуміти геометрично як масштабування вектора (якщо\(k > 0\)) або масштабування вектора і зворотне його напрямок (якщо\(k < 0\)), як показано нижче.
Зверніть увагу, що за визначенням 11.7,\((-1) \vec{v}=(-1)\left\langle v_{1}, v_{2}\right\rangle=\left\langle(-1) v_{1},(-1) v_{2}\right\rangle=\left\langle-v_{1},-v_{2}\right\rangle=-\vec{v}\). Це та інші властивості скалярного множення зведені нижче.
- Асоціативна властивість: Для кожного вектора\(\vec{v}\) і скалярів\(k\) і\(r\),\((k r) \vec{v}=k(r \vec{v})\).
- Властивість ідентичності: Для всіх векторів\(\vec{v}, 1 \vec{v}=\vec{v}\).
- Адитивна зворотна властивість: Для всіх векторів\(\vec{v},-\vec{v}=(-1) \vec{v}\).
- Розподільна властивість скалярного множення через скалярне додавання: для кожного вектора\(\vec{v}\) та скалярів\(k\) та\(r\),\[(k+r) \vec{v}=k \vec{v}+r \vec{v}\nonumber\]
- Розподільна властивість скалярного множення над векторним додаванням: Для всіх векторів\(\vec{v}\)\(\vec{w}\) та\(k\) скалярів\[k(\vec{v}+\vec{w})=k \vec{v}+k \vec{w}\nonumber\]
- нульовий продукт властивості: якщо\(\vec{v}\) вектор і\(k\) є скалярним, то\[k \vec{v}=\overrightarrow{0} \quad \text { if and only if } \quad k=0 \quad \text { or } \quad \vec{v}=\overrightarrow{0}\nonumber\]
Доказ теореми 11.19, як і доказ теореми 11.18, зрештою зводиться до визначення скалярного множення і властивостей дійсних чисел. Наприклад, щоб довести асоціативне властивість, дозволимо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\). Якщо\(k\) і\(r\) є скалярами, то
\(\begin{aligned} (k r) \vec{v} &=(k r)\left\langle v_{1}, v_{2}\right\rangle & & \\ &=\left\langle(k r) v_{1},(k r) v_{2}\right\rangle & & \text { Definition of Scalar Multiplication } \\ &=\left\langle k\left(r v_{1}\right), k\left(r v_{2}\right)\right\rangle & & \text { Associative Property of Real Number Multiplication } \\ &=k\left\langle r v_{1}, r v_{2}\right\rangle & & \text { Definition of Scalar Multiplication } \\ &=k\left(r\left\langle v_{1}, v_{2}\right\rangle\right) & & \text { Definition of Scalar Multiplication } \\ &=k(r \vec{v}) & & \end{aligned}\)
Решта властивості доводяться аналогічно і залишаються як вправи.
Наш наступний приклад демонструє, як Теорема 11.19 дозволяє нам робити такі ж алгебраїчні маніпуляції з векторами, як і зі змінними - множення і ділення векторів незалежно від. Якщо педантизм здається знайомим, слід. Це те саме лікування, яке ми дали приклад 8.3.1 в розділі 8.3. Як і в цьому прикладі, ми детально описуємо рішення, щоб спонукати читача добре подумати, чому кожен крок виправданий.
Вирішити\(5 \vec{v}-2(\vec{v}+\langle 1,-2\rangle)=\overrightarrow{0} \text { for } \vec{v}\).
Рішення
\ (\ почати {вирівняний}
5\ vec {v} -2 (\ vec {v} +\ кут 1, -2\ діапазон) &=\ переправа стрілка {0}\\
5\ vec {v} + (-1) [2 (\ vec {v} +\ кут 1, -2\ діапазон)] &=\ переправа стрілка {0}\\
5\ vec {v} + (-1) (2)] (\ vec {v} +\ кут 1, -2\ діапазон) &=\ переправа стрілка {0}\\
5\ vec {v} + (-2) ( \ vec {v} +\ кут 1, -2\ діапазон) &=\ переправа стрілка {0}\\
5\ vec {v} + [(-2)\ vec {v} + (-2)\ кут 1, -2\ діапазон] &=\ переправо {0}\
5\ vec {v} + [(-2)\ vec {v} +\ vec {v} +\ langle (-2) 1), (-2) (-2)\ діапазон] &=\ переправа стрілка {0}\\
{[5\ vec {v} + (-2)\ vec {v}] +\ langle-2,4\ діапазон} & ; =\ переправа стрілка {0}\\
(5+ (-2))\ vec {v} +\ лангу-2,4\ діапазон &=\ переправа стрілка {0}\\
3\ vec {v} +\ langle-2,4\ діапазон &=\ переправа стрілка {0}\\
(3\ vec {v} +\ langle-2,4\ діапазон) + (\\ le-2,4\ діапазон) &=\ переправа стрілка {0} + (-\ langle-2,4\ діапазон)\\
3\ vec {v} + [\ ланг-2,4\ діапазон+ (-\ ланг-2,4\ діапазон)] &=\ переправа стрілка {0} + (-1)\ ланг-2,4\ діапазон\\
3\ vec {v} +\ переправа стрілка {0} &=\ переправо {0} +\ langle (-1) (-2), (-1), (-1) (4) діапазон\\
3\ vec {v} &=\ лангл 2, -4\ діапазон\\
\ гідророзриву {1} {3} (3\ vec {v}) &=\ FRAC {1} { 3} (\ кут 2, -4\ діапазон)\\
{\ лівий [\ лівий (\ frac {1} {3}\ праворуч) (3)\ праворуч]\ vec {v}} &=\ ліворуч\ лангіт\ ліворуч (\ frac {1} {1} {1}\ правий) (2),\ лівий (\ frac {1} {3}\ правий) (-4)\ правий) (2),\ лівий (\ frac {
1}\ правий) (-4)\\ 1\ vec {v} &=\ лівий\ лангель\ frac {2} {3}, -\ frac {4} {3}\ правий\ діапазон
\\ vec {v} &=\ лівий\ лангл\ гідророзриву {2} {3}, -\ гідророзриву {4} {3}\ праворуч\ діапазон
\ кінець {вирівняний}\)
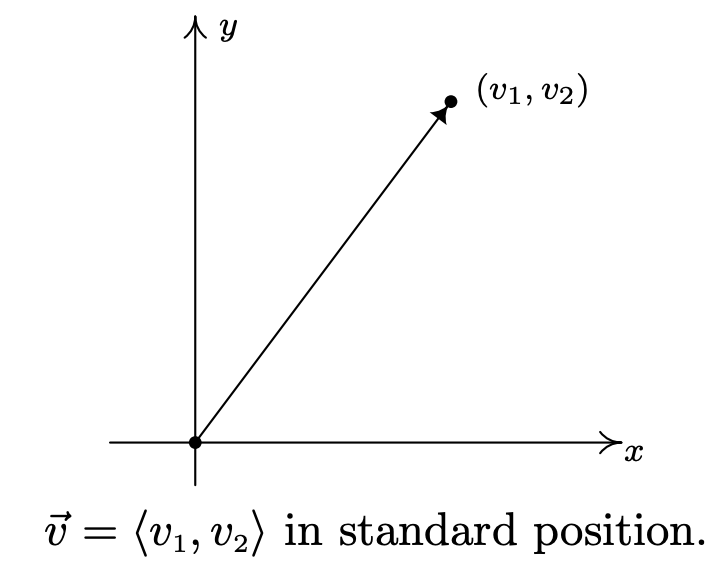
Вектор, початкова точка якого (0, 0), як кажуть, знаходиться в стандартному положенні. Якщо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\) наноситься в стандартному положенні, то його кінцева точка необхідна\(\left(v_{1}, v_{2}\right)\). (Ще раз подумайте про це, перш ніж читати далі.)
Побудова вектора в стандартному положенні дозволяє нам легше кількісно оцінити поняття величини і напрямку вектора. Ми можемо перетворити точку\(\left(v_{1}, v_{2}\right)\) в прямокутних координатах в пару\((r, \theta)\) в полярних координатах де\(r \geq 0\). Величина\(\vec{v}\), про яку ми говорили раніше, була довжиною спрямованого відрізка лінії, є\(r=\sqrt{v_{1}^{2}+v_{2}^{2}}\) і позначається\(\|\vec{v}\|\). З розділу 11.4 ми знаємо\(v_{1}=r \cos (\theta)=\|\vec{v}\| \cos (\theta)\) і\(v_{2}=r \sin (\theta)=\|\vec{v}\| \sin (\theta)\). З визначення скалярного множення і векторної рівності отримаємо
\(\begin{aligned} \vec{v} &=\left\langle v_{1}, v_{2}\right\rangle \\ &=\langle\|\vec{v}\| \cos (\theta),\|\vec{v}\| \sin (\theta)\rangle \\ &=\|\vec{v}\|\langle\cos (\theta), \sin (\theta)\rangle \end{aligned}\)
Це мотивує наступне визначення.
Припустимо,\(\vec{v}\) це вектор з формою компонента\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\). \((r, \theta)\)Дозволяти полярне подання точки з прямокутними координатами\(\left(v_{1}, v_{2}\right)\) с\(r \geq 0\).
- Величина\(\vec{v}\), що позначається\(\|\vec{v}\|\), задається\(\|\vec{v}\|=r=\sqrt{v_{1}^{2}+v_{2}^{2}}\)
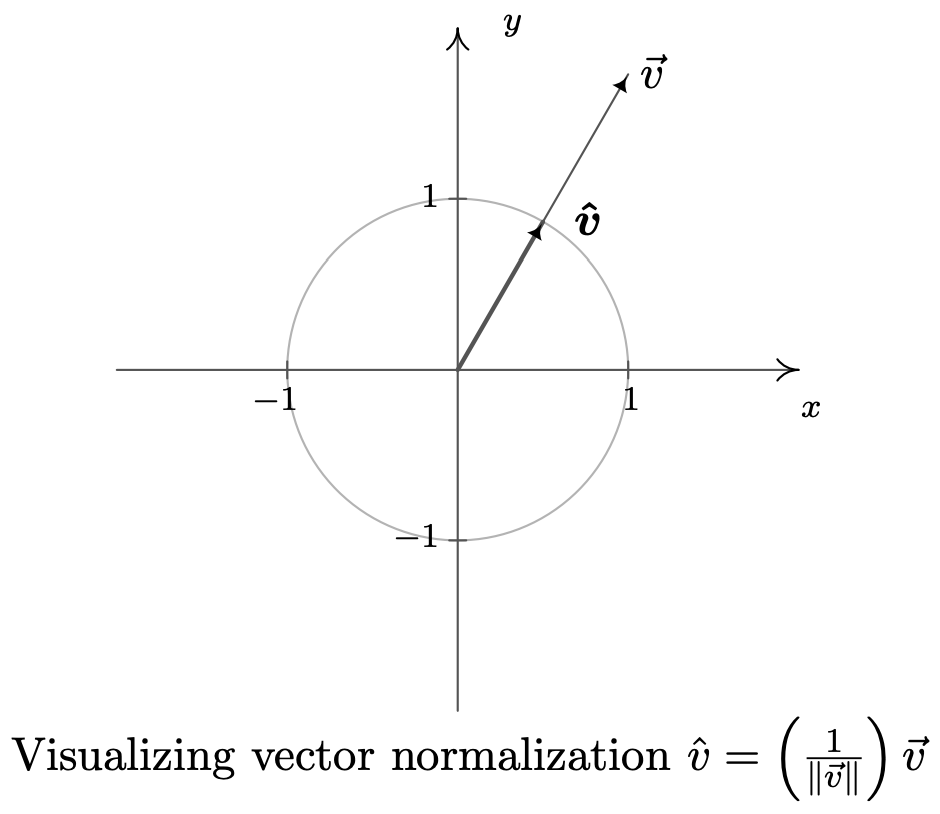
- Якщо\(\vec{v} \neq \overrightarrow{0}\), (вектор) напрямок\(\vec{v}\),\(\hat{v}\) що позначається, задається\(\hat{v}=\langle\cos (\theta), \sin (\theta)\rangle\)
Взяті разом, отримуємо\(\vec{v}=\langle\|\vec{v}\| \cos (\theta),\|\vec{v}\| \sin (\theta)\rangle\).
Кілька зауважень по порядку. По-перше, ми зауважимо, що якщо\(\vec{v} \neq 0\) тоді, хоча існує нескінченно багато кутів,\(\theta\) які задовольняють Визначенню 11.8,\(r > 0\) умова означає, що всі кути є співтермінальними. Отже, якщо\(\theta\) і\(\theta^{\prime}\) обидва задовольняють умовам визначення 11.8, то\(\cos (\theta)=\cos \left(\theta^{\prime}\right)\) і\(\sin (\theta)=\sin \left(\theta^{\prime}\right)\), і як таке,\(\langle\cos (\theta), \sin (\theta)\rangle=\left\langle\cos \left(\theta^{\prime}\right), \sin \left(\theta^{\prime}\right)\right\rangle\) внесення\(\hat{v}\) чітко визначено. 10 Якщо\(\vec{v}=\overrightarrow{0}\), то\(\vec{v}=\langle 0,0\rangle\), і ми знаємо з розділу 11.4, що\((0, \theta)\) є полярним представленням для початку для будь-якого кута\(\theta\). З цієї причини,\(\hat{0}\) не визначено. Наступна теорема узагальнює важливі факти про величину та напрямок вектора.
Припустимо,\(\vec{v}\) це вектор.
- \(\|\vec{v}\| \geq 0\)і\(\|\vec{v}\|=0\) якщо і тільки якщо\(\vec{v}=\overrightarrow{0}\)
- Для всіх скалярів\(k\),\(\|k \vec{v}\|=|k|\|\vec{v}\|\).
- Якщо\(\vec{v} \neq \overrightarrow{0}\) тоді\(\vec{v}=\|\vec{v}\| \hat{v}\), так що\(\hat{v}=\left(\frac{1}{\|\vec{v}\|}\right) \vec{v}\).
Доказ першої властивості в теоремі 11.20 є прямим наслідком визначення\(\|\vec{v}\|\). Якщо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\), то\(\|\vec{v}\|=\sqrt{v_{1}^{2}+v_{2}^{2}}\) який за визначенням більше або дорівнює 0. Причому,\(\sqrt{v_{1}^{2}+v_{2}^{2}}=0\) якщо і тільки\(v_{1}^{2}+v_{2}^{2}=0\) якщо і тільки якщо\(v_{1}=v_{2}=0\). Значить,\(\|\vec{v}\|=0\) якщо і тільки тоді\(\vec{v}=\langle 0,0\rangle=\overrightarrow{0}\), як потрібно.
Друга властивість є результатом визначення величини і скалярного множення поряд зі властивістю радикалів. Якщо\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\) і\(k\) є скаляром, то
\(\begin{aligned} \|k \vec{v}\| &=\left\|k\left\langle v_{1}, v_{2}\right\rangle\right\| & & \\ &=\left\|\left\langle k v_{1}, k v_{2}\right\rangle\right\| & & \text { Definition of scalar multiplication } \\ &=\sqrt{\left(k v_{1}\right)^{2}+\left(k v_{2}\right)^{2}} & & \text { Definition of magnitude } \\ &=\sqrt{k^{2} v_{1}^{2}+k^{2} v_{2}^{2}} & & \\ &=\sqrt{k^{2}\left(v_{1}^{2}+v_{2}^{2}\right)} & & \\ &=\sqrt{k^{2}} \sqrt{v_{1}^{2}+v_{2}^{2}} & & \text { Product Rule for Radicals } \\ &=|k| \sqrt{v_{1}^{2}+v_{2}^{2}} & & \text { Since } \sqrt{k^{2}}=|k| \\ &=|k|\|\vec{v}\| & & \end{aligned}\)
Рівняння\(\vec{v}=\|\vec{v}\| \hat{v}\) в теоремі 11.20 є наслідком визначень\(\|\vec{v}\|\)\(\hat{v}\) і було розроблено в обговоренні безпосередньо перед визначенням 11.8 на сторінці 1020. У словах рівняння\(\vec{v}=\|\vec{v}\| \hat{v}\) говорить про те, що будь-який заданий вектор є добутком його величини і його напрямку — важливе поняття, про яке слід пам'ятати при вивченні та використанні векторів. Рівняння\(\hat{v}=\left(\frac{1}{\|\vec{v}\|}\right) \vec{v}\) є результатом розв'язання\(\vec{v}=\|\vec{v}\| \hat{v}\) для\(\hat{v}\) шляхом множення 11 обох сторін рівняння на\(\frac{1}{\|\vec{v}\|}\) і використання властивостей теореми 11.19. Ми прострочені для прикладу.
- Знайти складову форму вектора\(\vec{v}\) з\(\|\vec{v}\|=5\) таким чином, щоб при\(\vec{v}\) побудові в стандартному положенні він лежав у квадранті II і утворював\(60^{\circ}\) кут 12 з негативною віссю x.
- Для\(\vec{v}=\langle 3,-3 \sqrt{3}\rangle\), знайти\(\|\vec{v}\|\) і\(\theta\),\(0 \leq \theta<2 \pi\) щоб\(\vec{v}=\|\vec{v}\|\langle\cos (\theta), \sin (\theta)\rangle\).
- Для векторів\(\vec{v}=\langle 3,4\rangle\) і\(\vec{w}=\langle 1,-2\rangle\), знайдіть наступне.
- \(\hat{v}\)
- \(\|\vec{v}\|-2\|\vec{w}\|\)
- \(\|\vec{v}-2 \vec{w}\|\)
- \(\|\hat{w}\|\)
Рішення
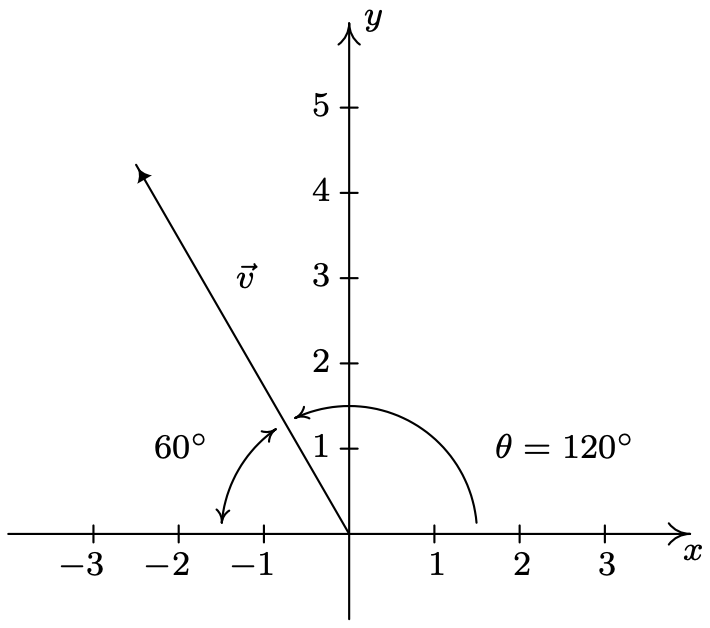
- Нам кажуть, що\(\|\vec{v}\|=5\) і дається інформація про його напрямок, тому ми можемо використовувати формулу\(\vec{v}=\|\vec{v}\| \hat{v}\) для отримання складової форми\(\vec{v}\). Для визначення\(\hat{v}\) звертаємося до визначення 11.8. Нам кажуть, що\(\vec{v}\) лежить в квадранті II і робить\(60^{\circ}\) кут з негативною\(x\) -віссю, тому полярна форма кінцевої точки\(\vec{v}\), при побудові в стандартному положенні є\(\left(5,120^{\circ}\right)\). (Див. Схему нижче.) Таким чином\(\hat{v}=\left\langle\cos \left(120^{\circ}\right), \sin \left(120^{\circ}\right)\right\rangle=\left\langle-\frac{1}{2}, \frac{\sqrt{3}}{2}\right\rangle, \text { so } \vec{v}=\|\vec{v}\| \hat{v}=5\left\langle-\frac{1}{2}, \frac{\sqrt{3}}{2}\right\rangle=\left\langle-\frac{5}{2}, \frac{5 \sqrt{3}}{2}\right\rangle\).
- За\(\vec{v}=\langle 3,-3 \sqrt{3}\rangle\), отримуємо\(\|\vec{v}\|=\sqrt{(3)^{2}+(-3 \sqrt{3})^{2}}=6\). У світлі визначення 11.8, ми можемо знайти\(\theta\) ми після перетворення точки з прямокутними координатами\((3,-3 \sqrt{3})\) в полярну форму\((r, \theta)\) де\(r=\|\vec{v}\|>0\). З розділу 11.4 ми маємо\(\tan (\theta)=\frac{-3 \sqrt{3}}{3}=-\sqrt{3}\). Оскільки\((3,-3 \sqrt{3})\) є точкою в квадранті IV,\(\theta\) є кутом квадранта IV. Значить, підбираємо\(\theta=\frac{5 \pi}{3}\). Ми можемо перевірити нашу відповідь, перевіривши\(\vec{v}=\langle 3,-3 \sqrt{3}\rangle=6\left\langle\cos \left(\frac{5 \pi}{3}\right), \sin \left(\frac{5 \pi}{3}\right)\right\rangle\).
-
- Оскільки нам дається складова форма\(\vec{v}\), ми будемо використовувати формулу\(\hat{v}=\left(\frac{1}{\|\vec{v}\|}\right) \vec{v}\). Бо\(\vec{v}=\langle 3,4\rangle\), у нас є\(\|\vec{v}\|=\sqrt{3^{2}+4^{2}}=\sqrt{25}=5\). Отже,\(\hat{v}=\frac{1}{5}\langle 3,4\rangle=\left\langle\frac{3}{5}, \frac{4}{5}\right\rangle\).
- Ми знаємо з нашої роботи вище\(\|\vec{v}\|=5\), що, тому, щоб знайти\(\|\vec{v}\|-2\|\vec{w}\|\), нам потрібно тільки знайти\(\|\vec{w}\|\). З тих пір\(\vec{w}=\langle 1,-2\rangle\), ми отримуємо\(\|\vec{w}\|=\sqrt{1^{2}+(-2)^{2}}=\sqrt{5}\). Отже,\(\|\vec{v}\|-2\|\vec{w}\|=5-2 \sqrt{5}\).
- У виразі зверніть увагу\(\|\vec{v}-2 \vec{w}\|\), що спочатку йде арифметика на векторах, потім величина. Отже, наш перший крок - знайти складову форму вектора\(\vec{v}-2 \vec{w}\). Отримуємо\(\vec{v}-2 \vec{w}=\langle 3,4\rangle-2\langle 1,-2\rangle=\langle 1,8\rangle\). Отже,\(\|\vec{v}-2 \vec{w}\|=\|\langle 1,8\rangle\|=\sqrt{1^{2}+8^{2}}=\sqrt{65}\).
- Щоб знайти\(\|\hat{w}\|\), нам спочатку потрібно\(\hat{w}\). Використовуючи\(\hat{w}=\left(\frac{1}{\|\vec{w}\|}\right) \vec{w}\) разом з формулою\(\|\vec{w}\|=\sqrt{5}\), яку ми знайшли в попередній задачі, отримуємо\(\hat{w}=\frac{1}{\sqrt{5}}\langle 1,-2\rangle=\left\langle\frac{1}{\sqrt{5}},-\frac{2}{\sqrt{5}}\right\rangle=\left\langle\frac{\sqrt{5}}{5},-\frac{2 \sqrt{5}}{5}\right\rangle\). Отже,\(\|\hat{w}\|=\sqrt{\left(\frac{\sqrt{5}}{5}\right)^{2}+\left(-\frac{2 \sqrt{5}}{5}\right)^{2}}=\sqrt{\frac{5}{25}+\frac{20}{25}}=\sqrt{1}=1\).
Процес на прикладі № 1 у прикладі 11.8.4 вище, за допомогою якого ми беремо інформацію про величину і напрямок вектора і знаходимо складову форму вектора, називається розв'язанням вектора на його складові. Як застосування цього процесу, ми переглядаємо приклад 11.8.1 нижче.
Літак залишає аеропорт зі швидкістю 175 миль на годину з підшипником\(\mathrm{N} 40^{\circ} \mathrm{E}\). Вітер 35 милі на годину дме на підшипник\(\mathrm{S} 60^{\circ} \mathrm{E}\). Знайдіть справжню швидкість літака, округлену до найближчої милі на годину, і справжню несучу площину, округлену до найближчого градуса.
Рішення
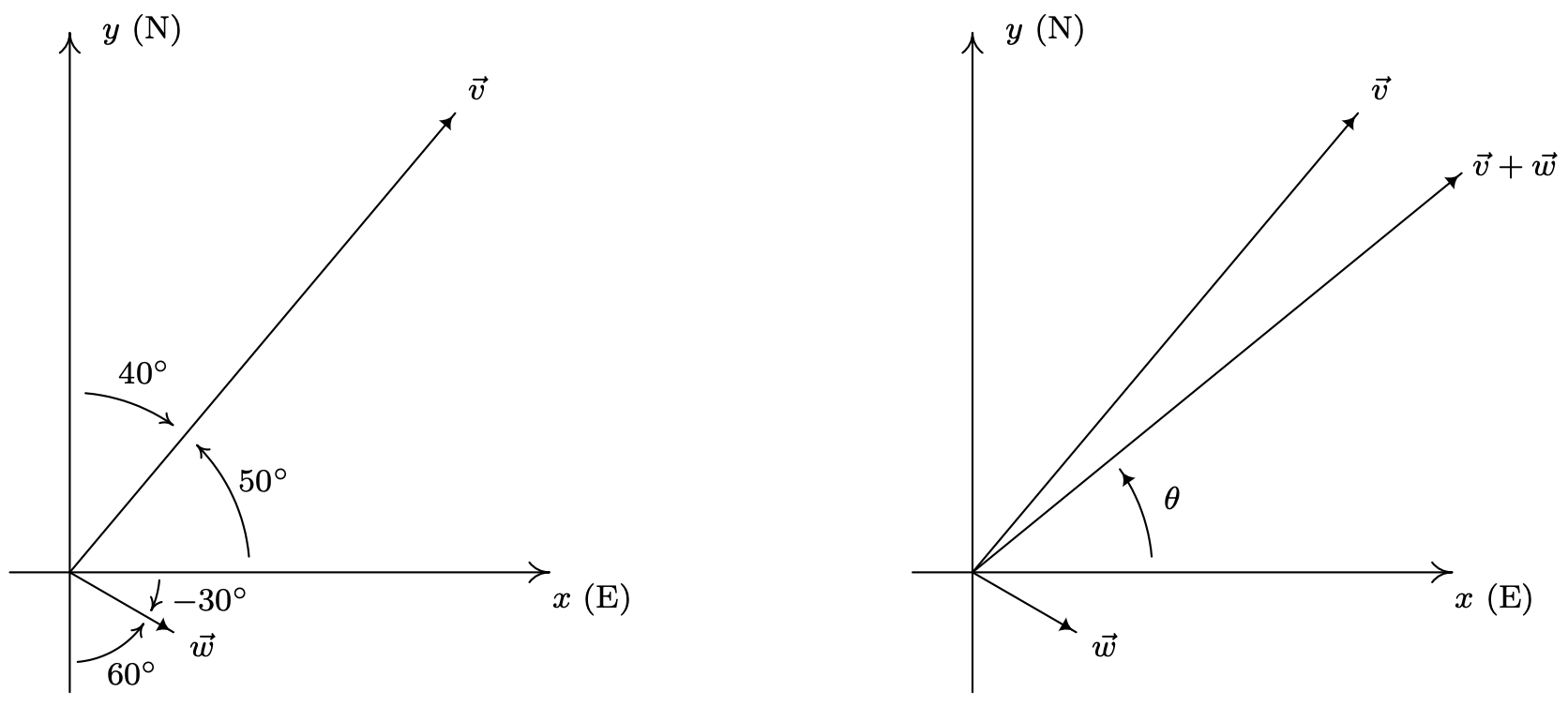
Ми продовжуємо, як ми зробили в прикладі 11.8.1 і давайте\(\vec{v}\)\(\vec{w}\) позначити швидкість літака і позначити швидкість вітру, і встановити про визначення\(\vec{v}+\vec{w}\). Якщо ми розглядаємо аеропорт як на початку, позитивна\(y\) -вісь діє як належна північ, а позитивна\(x\) -вісь діє як належний схід, ми бачимо, що вектори\(\vec{v}\) і\(\vec{w}\) знаходяться в стандартному положенні та їх напрямки відповідають кутам\(50^{\circ}\) і\(-30^{\circ}\), відповідно. Отже, складова форма\(\vec{v}=175\left\langle\cos \left(50^{\circ}\right), \sin \left(50^{\circ}\right)\right\rangle=\left\langle 175 \cos \left(50^{\circ}\right), 175 \sin \left(50^{\circ}\right)\right\rangle\) і складова форма\(\vec{w}=\left\langle 35 \cos \left(-30^{\circ}\right), 35 \sin \left(-30^{\circ}\right)\right\rangle\). Оскільки у нас немає зручного способу вираження точних значень косинуса і синуса\(50^{\circ}\), ми залишаємо обидва вектора через косинуси і синуси. 13 Додавши відповідні компоненти, знаходимо результуючий вектор\(\vec{v}+\vec{w}=\left\langle 175 \cos \left(50^{\circ}\right)+35 \cos \left(-30^{\circ}\right), 175 \sin \left(50^{\circ}\right)+35 \sin \left(-30^{\circ}\right)\right\rangle\). Щоб знайти «справжню» швидкість літака, ми обчислюємо величину цього результуючого вектора\[\|\vec{v}+\vec{w}\|=\sqrt{\left(175 \cos \left(50^{\circ}\right)+35 \cos \left(-30^{\circ}\right)\right)^{2}+\left(175 \sin \left(50^{\circ}\right)+35 \sin \left(-30^{\circ}\right)\right)^{2}} \approx 184\nonumber\] Отже, «справжня» швидкість літака становить приблизно 184 милі на годину. Щоб знайти справжній підшипник, нам потрібно знайти кут\((r, \theta), r>0\),\(\theta\) який відповідає полярній формі точки\((x, y)=\left(175 \cos \left(50^{\circ}\right)+35 \cos \left(-30^{\circ}\right), 175 \sin \left(50^{\circ}\right)+35 \sin \left(-30^{\circ}\right)\right)\). Оскільки обидві ці координати є позитивними, 14 ми знаємо,\(\theta\) є кутом квадранта I, як показано нижче. Крім того,\[\tan (\theta)=\frac{y}{x}=\frac{175 \sin \left(50^{\circ}\right)+35 \sin \left(-30^{\circ}\right)}{175 \cos \left(50^{\circ}\right)+35 \cos \left(-30^{\circ}\right)},\nonumber\] таким чином, використовуючи функцію арктангенс, ми отримуємо\(\theta \approx 39^{\circ}\). Оскільки для цілей підшипника нам потрібен кут між\(\vec{v}+\vec{w}\) і позитивною\(y\) -віссю, ми беремо доповнення\(\theta\) і знаходимо «істинний» підшипник площини приблизно\(\mathrm{N} 51^{\circ} \mathrm{E}\).
У частині 3d Приклад 11.8.4, ми побачили, що\(\|\hat{w}\|=1\). Вектори довжиною 1 мають особливу назву і важливі в нашому подальшому вивченні векторів.
Одиниці векторів:\(\vec{v}\) Дозволяти бути вектором. Якщо\(\|\vec{v}\|=1\), ми говоримо, що\(\vec{v}\) це одиничний вектор.
Якщо\(\vec{v}\) це одиничний вектор, то обов'язково,\(\vec{v}=\|\vec{v}\| \hat{v}=1 \cdot \hat{v}=\hat{v}\). І навпаки, ми залишаємо це як вправу 15, щоб показати, що\(\hat{v}=\left(\frac{1}{\|\vec{v}\|}\right) \vec{v}\) це одиничний вектор для будь-якого ненульового вектора\(\vec{v}\). На практиці, якщо\(\vec{v}\) це одиничний вектор, ми пишемо його на\(\vec{v}\) відміну від\(\vec{v}\) тому, що ми зарезервували позначення «» для одиничних векторів. Процес множення ненульового вектора на коефіцієнт\(\frac{1}{\|\vec{v}\|}\) для отримання одиничного вектора називається «нормалізацією вектора», а отриманий вектор\(\vec{v}\) називається «одиничним вектором у напрямку\(\vec{v^{\prime}}\). Кінцеві точки одиничних векторів при нанесенні в стандартному положенні лежать на Одиничному колі. (Ви повинні витратити час, щоб показати це.) В результаті ми візуалізуємо нормалізацію ненульового вектора\(\vec{v}\) як стиснення 16 його кінцевої точки, при нанесенні в стандартному положенні, назад до одиничного кола.
З усіх векторів одиниць два заслуговують окремої згадки.
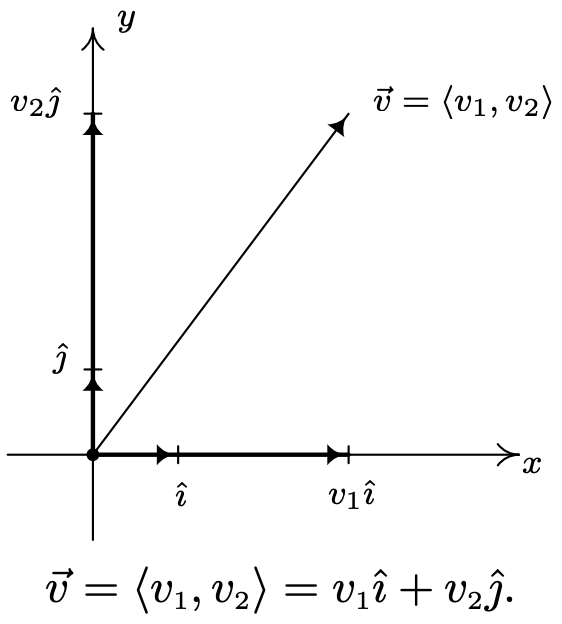
- \(\hat{\imath}\)Вектор визначається\(\hat{\imath}=\langle 1,0\rangle\)
- \(\hat{\jmath}\)Вектор визначається\(\hat{\imath}=\langle 0,1\rangle\)
Ми можемо думати про вектор\(\hat{\imath}\) як представлення позитивного\(x\) напрямку, тоді як\(\hat{\jmath}\) представляє позитивний\(y\) -напрямок. У нас є наступна теорема про розкладання. 17
\(\vec{v}\)Дозволяти вектор з формою компонента\(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\). Потім\(\vec{v}=v_{1} \hat{\imath}+v_{2} \hat{\jmath}\).
Доказ теореми 11.21 є простим. Оскільки\(\hat{\imath}=\langle 1,0\rangle\) і\(\hat{\jmath}=\langle 0,1\rangle\), ми маємо з визначення скалярного множення та додавання векторів, що
\(v_{1} \hat{\imath}+v_{2} \hat{\jmath}=v_{1}\langle 1,0\rangle+v_{2}\langle 0,1\rangle=\left\langle v_{1}, 0\right\rangle+\left\langle 0, v_{2}\right\rangle=\left\langle v_{1}, v_{2}\right\rangle=\vec{v}\)
Геометрично ситуація виглядає наступним чином:
Завершуємо цей розділ класичним прикладом, який демонструє, як вектори використовуються для моделювання сил. «Сила» визначається як «поштовх» або «тягнути». Інтенсивність поштовху або тяги - це величина сили, і вимірюється в Netwons (N) в системі SI або фунтах (фунтів.) в англійській системі. 18 Наступний приклад використовує всі поняття в цьому розділі, і його слід вивчити дуже докладно.
50-фунтовий динамік підвішений до стелі двома опорними скобами. Якщо один з них робить\(60^{\circ}\) кут зі стелею, а інший робить\(30^{\circ}\) кут зі стелею, які натяги на кожній з опор?
Рішення
Представляємо задачу схематично нижче, а потім наводимо відповідну векторну діаграму.
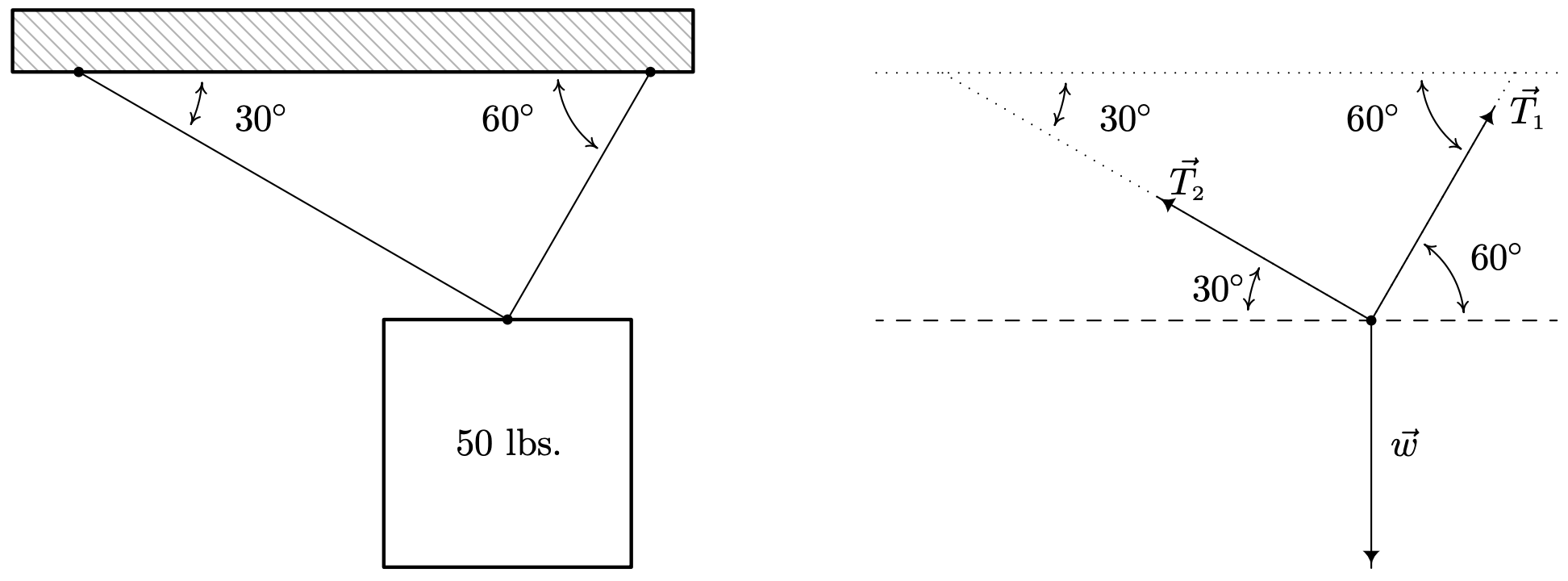
У нас на динамік діють три сили: вага динаміка, який ми будемо називати\(\vec{w}\), тягнучи динамік прямо вниз, і сили на опорні стрижні, які ми будемо називати\(\vec{T}_{1}\) і\(\vec{T}_{2}\) (для «напружень»)\(30^{\circ}\), що діють вгору під кутами\(60^{\circ}\) і відповідно. Ми шукаємо напруженість на опорі, які є величинами\(\left\|\vec{T}_{1}\right\|\) і\(\left\|\vec{T}_{2}\right\|\). Для того щоб динамік залишався нерухомим, потрібно 19\(\vec{w}+\overrightarrow{T_{1}}+\overrightarrow{T_{2}}=\overrightarrow{0}\). Розглядаючи загальну початкову точку цих векторів як початок і пунктирну лінію як\(x\) вісь -, ми використовуємо теорему 11.20, щоб отримати компонентні зображення для трьох задіяних векторів. Ми можемо моделювати вагу динаміка як вектор, спрямований безпосередньо вниз з величиною 50 фунтів. Тобто,\(\|\vec{w}\|=50\) і\(\hat{w}=-\hat{\jmath}=\langle 0,-1\rangle\). Отже,\(\vec{w}=50\langle 0,-1\rangle=\langle 0,-50\rangle\). За силу в першій опорі отримуємо\ [\ begin {вирівняний}
\ vec {T} _ {1} &=\ лівий\ |\ vec {T} _ {1}\ правий\ |\ лівий\ лангл\ cos\ left (60^ {\ circ}\ правий)\ sin\ left (60^ {\ circ}\ праворуч)\ правий\ діапазон\\ &=\ лівий\ lкут\ frac {\ лівий\ |\ vec {T} _ {1}\ право\ |} {2},\ frac {\ лівий\ |\ vec {T} _ {1}\ вправо\ |\ sqrt {3}} {2}\ right\ rangle\ end {aligned}\ nonumber\] Для другої опори зауважимо, що кут\(30^{\circ}\) вимірюється від негативної\(x\) -осі, тому кут, необхідний для запису\(\overrightarrow{T_{2}}\) у вигляді компонента, є\(150^{\circ}\). Звідси\ [\ почати {вирівняний}\ vec {T} _ {2} &=\ лівий\ |\ vec {T} _ {2}\ вправо\ |\ лівий\ лангл\ cos\ лівий (150^ {\ circ}\ правий),\ sin\ лівий (150^ {\ circ}\ вправо\ діапазон\\ &=\ лівий\ langle-\ frac {\ лівий\ |\ vec {T} _ {2}\ право\ |\ sqrt {3}} {2},\ frac {\ лівий\ |\ vec {T} _ {2}\ праворуч\ |} {2}\ праворуч\ діапазон
\ кінець {вирівняний}\] вимога\(\vec{w}+\vec{T}_{1}+\vec{T}_{2}=\overrightarrow{0}\) дає нам це векторне рівняння. \ [\ begin {масив} {rrl}
&\ vec {w} +\ vec {T} _ {1} +\ vec {T} _ {2} &= &\ overrightarrow {0}\ &\ langle 0, -50\\ діапазон\ ліворуч\\ frac {\ лівий\ |\ vec {T} _ {1}\ вправо\} | {2},\ frac {\ лівий\ |\ vec {T} _ {1}\ вправо\ |\ sqrt {3}} {2}\ праворуч\ діапазон+\ лівий\ ланґль-\ frac {\ лівий\ |\ vec {T} _ {2}\ вправо\ |\ sqrt {3}} {2},\ frac {\ лівий\ |\ vec {T} _ {2}\ праворуч\ |} {2}\ праворуч\ діапазон&= &\ кут 0,0\ діапазон\\ &\ лівий\ кут\ frac {\ лівий\ |\ vec {T} _ {1}\ вправо\ |} {2} -\ frac {\ ліворуч\ |\ vec {T} _ {2}\ вправо |\ sqrt {3} {2},\ frac {\ ліворуч\ |\ vec {T} _ {1}\ праворуч\ |\ sqrt {3}} {2} +\ лівий\ |\ vec {T} _ {2}\ вправо\ |} {2} -50\ правий\ діапазон = &\ langle 0,0\ кінець {масив}\ nonumber\] Прирівнюючи відповідні складові векторів з кожного боку, отримаємо систему лінійних рівнянь в змінних\(\left\|\overrightarrow{T_{1}}\right\|\) і\(\left\|\vec{T}_{2}\right\|\). \[\left\{\begin{array}{l} (E 1) \quad \frac{\left\|\vec{T}_{1}\right\|}{2}-\frac{\left\|\vec{T}_{2}\right\| \sqrt{3}}{2}&=0 \\ (E 2) \frac{\left\|\vec{T}_{1}\right\| \sqrt{3}}{2}+\frac{\left\|\vec{T}_{2}\right\|}{2}-50&=0 \end{array}\right.\nonumber\]Від\((E 1)\), отримуємо\(\left\|\vec{T}_{1}\right\|=\left\|\vec{T}_{2}\right\| \sqrt{3}\). Підставляючи те, що в\((E 2)\) дає,\(\frac{\left(\left\|\overrightarrow{T_{2}}\right\| \sqrt{3}\right) \sqrt{3}}{2}+\frac{\left\|\vec{T}_{2}\right\|}{2}-50=0\) яка дає врожайність\(2\left\|\vec{T}_{2}\right\|-50=0\). Значить,\(\left\|\vec{T}_{2}\right\|=25\) фунти і\(\left\|\vec{T}_{1}\right\|=\left\|\vec{T}_{2}\right\| \sqrt{3}=25 \sqrt{3}\) фунти.
11.8.1 Вправи
У вправах 1 - 10 використовуйте задану пару векторів\(\vec{v}\) і\(\vec{w}\) знайдіть наступні величини. Вкажіть, чи є результат вектором або скаляром.
- \(\vec{v}+\vec{w}\)
- \(\vec{w}-2 \vec{v}\)
- \(\|\vec{v}+\vec{w}\|\)
- \(\|\vec{v}\|+\|\vec{w}\|\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}\)
- \(\|\vec{w}\| \hat{v}\)
Нарешті, переконайтеся, що вектори задовольняють закону паралелограма
\(\|\vec{v}\|^{2}+\|\vec{w}\|^{2}=\frac{1}{2}\left[\|\vec{v}+\vec{w}\|^{2}+\|\vec{v}-\vec{w}\|^{2}\right]\)
- \(\vec{v}=\langle 12,-5\rangle, \vec{w}=\langle 3,4\rangle\)
- \(\vec{v}=\langle-7,24\rangle, \vec{w}=\langle-5,-12\rangle\)
- \(\vec{v}=\langle 2,-1\rangle, \vec{w}=\langle-2,4\rangle\)
- \(\vec{v}=\langle 10,4\rangle, \vec{w}=\langle-2,5\rangle\)
- \(\vec{v}=\langle-\sqrt{3}, 1\rangle, \vec{w}=\langle 2 \sqrt{3}, 2\rangle\)
- \(\vec{v}=\left\langle\frac{3}{5}, \frac{4}{5}\right\rangle, \vec{w}=\left\langle-\frac{4}{5}, \frac{3}{5}\right\rangle\)
- \(\vec{v}=\left\langle\frac{\sqrt{2}}{2},-\frac{\sqrt{2}}{2}\right\rangle, \vec{w}=\left\langle-\frac{\sqrt{2}}{2}, \frac{\sqrt{2}}{2}\right\rangle\)
- \(\vec{v}=\left\langle\frac{1}{2}, \frac{\sqrt{3}}{2}\right\rangle, \vec{w}=\langle-1,-\sqrt{3}\rangle\)
- \(\vec{v}=3 \hat{\imath}+4 \hat{\jmath}, \vec{w}=-2 \hat{\jmath}\)
- \(\vec{v}=\frac{1}{2}(\hat{\imath}+\hat{\jmath}), \vec{w}=\frac{1}{2}(\hat{\imath}-\hat{\jmath})\)
У вправах 11 - 25 знайдіть складову форму вектора,\(\vec{v}\) використовуючи дані про його величину і напрямок. Дайте точні значення.
- \(\|\vec{v}\|=6\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті I і робить\(60^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=3\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті I і робить\(45^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=\frac{2}{3}\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті I і робить\(60^{\circ}\) кут з позитивною\(y\) -віссю
- \(\|\vec{v}\|=12\); при накресленні в стандартному положенні\(\vec{v}\) лежить вздовж позитивної\(y\) -осі
- \(\|\vec{v}\|=4\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті II і робить\(30^{\circ}\) кут з негативною\(x\) віссю
- \(\|\vec{v}\|=2 \sqrt{3}\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті II і робить\(30^{\circ}\) кут з позитивною\(y\) -віссю
- \(\|\vec{v}\|=\frac{7}{2}\); при накресленні в стандартному положенні\(\vec{v}\) лежить уздовж негативної\(x\) осі
- \(\|\vec{v}\|=5 \sqrt{6}\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті III і робить\(45^{\circ}\) кут з негативною\(x\) віссю
- \(\|\vec{v}\|=6.25\); при накресленні в стандартному положенні\(\vec{v}\) лежить уздовж негативної\(y\) осі
- \(\|\vec{v}\|=4 \sqrt{3}\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті IV і робить\(30^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=5 \sqrt{2}\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті IV і робить\(45^{\circ}\) кут з негативною\(y\) віссю
- \(\|\vec{v}\|=2 \sqrt{5}\); при накресленні в стандартному положенні\(\vec{v}\) лежить в квадранті I і робить кут вимірювання арктана (2) з позитивною\(x\) -віссю
- \(\|\vec{v}\|=\sqrt{10}\); при накресленні в стандартному положенні\(\vec{v}\) лежить в квадранті II і робить кут вимірювання арктана (3) з негативною\(x\) віссю
- \(\|\vec{v}\|=5\); при накресленні в стандартному положенні\(\vec{v}\) лежить в квадранті III і робить кут вимірювання\(\arctan \left(\frac{4}{3}\right)\) з негативною\(x\) віссю
- \(\|\vec{v}\|=26\); при малюванні в стандартному положенні\(\vec{v}\) лежить в квадранті IV і робить кут вимірювання\(\arctan \left(\frac{5}{12}\right)\) з позитивною\(x\) віссю
У вправах 26 - 31 наближають складову форму вектора,\(\vec{v}\) використовуючи інформацію, наведену про його величину і напрямок. Округліть ваші наближення до двох знаків після коми.
- \(\|\vec{v}\|=392\); при накресленні в стандартному положенні\(\vec{v}\) робить\(117^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=63.92\); при накресленні в стандартному положенні\(\vec{v}\) робить\(78.3^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=5280\); при накресленні в стандартному положенні\(\vec{v}\) робить\(12^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=450\); при накресленні в стандартному положенні\(\vec{v}\) робить\(210.75^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=168.7\); при накресленні в стандартному положенні\(\vec{v}\) робить\(252^{\circ}\) кут з позитивною\(x\) -віссю
- \(\|\vec{v}\|=26\); при накресленні в стандартному положенні\(\vec{v}\) маскує\(304.5^{\circ}\) кут з позитивною\(x\) -віссю
У Вправах 32 - 52 для даного вектора\(\vec{v}\) знайдіть величину\(\|\vec{v}\|\) і кут\(\theta\) з\(0 \leq \theta<360^{\circ}\) таким чином\(\vec{v}=\|\vec{v}\|\langle\cos (\theta), \sin (\theta)\rangle\) (Див. Визначення 11.8.) Округлені наближення до двох знаків після коми.
- \(\vec{v}=\langle 1, \sqrt{3}\rangle\)
- \(\vec{v}=\langle 5,5\rangle\)
- \(\vec{v}=\langle-2 \sqrt{3}, 2\rangle\)
- \(\vec{v}=\langle-\sqrt{2}, \sqrt{2}\rangle\)
- \(\vec{v}=\left\langle-\frac{\sqrt{2}}{2},-\frac{\sqrt{2}}{2}\right\rangle\)
- \(\vec{v}=\left\langle-\frac{1}{2},-\frac{\sqrt{3}}{2}\right\rangle\)
- \(\vec{v}=\langle 6,0\rangle\)
- \(\vec{v}=\langle-2.5,0\rangle\)
- \(\vec{v}=\langle 0, \sqrt{7}\rangle\)
- \(\vec{v}=-10 \hat{\jmath}\)
- \(\vec{v}=\langle 3,4\rangle\)
- \(\vec{v}=\langle 12,5\rangle\)
- \(\vec{v}=\langle-4,3\rangle\)
- \(\vec{v}=\langle-7,24\rangle\)
- \(\vec{v}=\langle-2,-1\rangle\)
- \(\vec{v}=\langle-2,-6\rangle\)
- \(\vec{v}=\hat{\imath}+\hat{\jmath}\)
- \(\vec{v}=\hat{\imath}-4 \hat{\jmath}\)
- \(\vec{v}=\langle 123.4,-77.05\rangle\)
- \(\vec{v}=\langle 965.15,831.6\rangle\)
- \(\vec{v}=\langle-114.1,42.3\rangle\)
- Невеликий човен залишає док в таборі Dunuthin і прямує через річку Нессі зі швидкістю 17 миль на годину (тобто по відношенню до води) при підшипнику S68◦ W Річка тече через схід зі швидкістю 8 миль на годину. Яка справжня швидкість і рух човна? Округлите швидкість до найближчої милі на годину і висловіть заголовок у вигляді підшипника, округленого до найближчої десятої частки градуса.
- HMS Sasquatch залишає порт з підшипником,\(\mathrm{S} 20^{\circ} \mathrm{E}\) підтримуючи швидкість 42 миль на годину (тобто по відношенню до води). Якщо океанська течія становить 5 миль на годину з підшипником\(\mathrm{N} 60^{\circ} \mathrm{E}\), знайдіть справжню швидкість і підшипник HMS Sasquatch. Округлите швидкість до найближчої милі на годину і висловіть заголовок у вигляді підшипника, округленого до найближчої десятої частки градуса.
- Якщо капітан HMS Sasquatch у навчанні 54 бажає досягти бухти Чупакабра, острів 100 миль\(\mathrm{S} 20^{\circ} \mathrm{E}\) від порту, за три години, яку швидкість і курс вона повинна встановити, щоб врахувати океанічну течію? Округлите швидкість до найближчої милі на годину і висловіть заголовок у вигляді підшипника, округленого до найближчої десятої частки градуса.
ПІДКАЗКА: Якщо\(\vec{v}\) позначає швидкість HMS Sasquatch і\(\vec{w}\) позначає швидкість течії, що\(\vec{v}+\vec{w}\) потрібно, щоб дістатися до бухти Чупакабра за три години?
- У спокійному повітрі літак, що летить з міжнародного аеропорту Pedimaxus, може дістатися до Скелі безумства за дві години, слідуючи підшипнику\(\mathrm{N} 8.2^{\circ} \mathrm{E}\) на 96 миль на годину. (Відстань між аеропортом і скелями - 192 милі.) Якщо вітер дме з південного сходу зі швидкістю 25 миль на годину, яку швидкість і підшипник повинен взяти пілот, щоб вона здійснила поїздку за дві години по початковому курсу? Округляйте швидкість до найближчої сотої частки милі на годину і свій кут до найближчої десятої частки градуса.
- Снігова людина СС залишає затоку Йеті на курсі зі\(\mathrm{N} 37^{\circ} \mathrm{W}\) швидкістю 50 миль на годину. Проїхавши півгодини, капітан визначає, що він знаходиться в 30 милі від затоки і його підшипник назад до бухти\(\mathrm{S} 40^{\circ} \mathrm{E}\). Яка швидкість і підшипник океанічної течії? Округлите швидкість до найближчої милі на годину і висловіть заголовок у вигляді підшипника, округленого до найближчої десятої частки градуса.
- Статуя Саскватча 600 фунтів підвішена двома кабелями від стелі гімназії. Якщо кожен кабель робить\(60^{\circ}\) кут зі стелею, знайдіть натяг на кожному кабелі. Округліть відповідь до найближчого фунта.
- Два кабелі призначені для підтримки об'єкта, що звисає зі стелі. Якщо кабелі мають зробити\(42^{\circ}\) кут зі стелею, і кожен кабель розрахований на максимальну напругу 100 фунтів, який найважчий предмет, який можна підтримувати? Округліть відповідь до найближчого фунта.
- Металева зірка 300 фунтів висить на двох кабелів, які прикріплені до стелі. Лівий трос робить\(72^{\circ}\) кут зі стелею, тоді як правий кабель робить\(18^{\circ}\) кут зі стелею. Яке натяг на кожному з тросів? Округляйте відповіді до трьох знаків після коми.
- Двоє п'яних студентів коледжу наповнили порожню пивну бочку з камінням і прив'язали до нього мотузки, щоб перетягнути його по вулиці посеред ночі. Сильніший з двох студентів тягне з силою 100 фунтів на заголовок,\(\mathrm{N} 77^{\circ} \mathrm{E}\) а інший тягне в заголовок\(\mathrm{S} 68^{\circ} \mathrm{E}\). Яку силу слабший школяр повинен докласти до своєї мотузки, щоб бочонок скель очолив через схід? Яка результуюча сила прикладається до бочки? Округліть відповідь до найближчого фунта.
- Підбадьорений успіхом їх пізньої ночі бочонок тягнути у вправі 61 вище, наші безстрашні молоді вчені вирішили віддати належне сцені гонки колісниць з фільму «Бен-Гур», прив'язавши три мотузки до дивана, завантажуючи диван з усіма, крім одного зі своїх друзів, і потягнувши його через захід вниз по вулиці. Перша мотузка вказує\(\mathrm{N} 80^{\circ} \mathrm{W}\), друга вказує на захід і третя точка\(\mathrm{S} 80^{\circ} \mathrm{W}\). Сила, прикладена до першої мотузки, становить 100 фунтів, сила, прикладена до другої мотузки, становить 40 фунтів, а сила, прикладена (не їде друг) до третьої мотузки - 160 фунтів. Їм потрібна результуюча сила, щоб бути не менше 300 фунтів, інакше диван не рухатиметься. Чи рухається він? Якщо так, то чи рухається він через захід?
- \(\vec{v}=\left\langle v_{1}, v_{2}\right\rangle\)Дозволяти будь ненульовий вектор. Показати, що\(\frac{1}{\|\vec{v}\|} \vec{v}\) має довжину 1.
- Ми говоримо, що два ненульових вектора\(\vec{v}\) і\(\vec{w}\) паралельні, якщо вони мають однакові або протилежні напрямки. Тобто,\(\vec{v} \neq \overrightarrow{0}\) і\(\vec{w} \neq \overrightarrow{0}\) паралельні, якщо\(\hat{v}=\hat{w}\) або\(\hat{v}=-\hat{w}\). Показати, що це означає\(\vec{v}=k \vec{w}\) для деяких ненульових скалярних\(k\) і що\(k > 0\) якщо вектори мають однаковий напрямок і\(k < 0\) якщо вони вказують в протилежних напрямках.
- Мета цієї вправи - використовувати вектори для опису невертикальних ліній на площині. З цією метою розглянемо лінію\(y=2 x-4\). Нехай\(\vec{v}_{0}=\langle 0,-4\rangle\) і нехай\(\vec{s}=\langle 1,2\rangle\). \(t\)Дозволяти бути будь-яке дійсне число. Показати, що вектор, визначений\(\vec{v}=\vec{v}_{0}+t \vec{s}\), коли він намальований у стандартному положенні, має свою кінцеву точку на лінії\(y = 2x − 4\). (Підказка: Покажіть, що\(\vec{v}_{0}+t \vec{s}=\langle t, 2 t-4\rangle\) для будь-якого реального числа\(t\).) Тепер розглянемо невертикальну лінію\(y = mx+b\). Повторіть попередній аналіз з\(\vec{v}_{0}=\langle 0, b\rangle\) і нехай\(\vec{s}=\langle 1, m\rangle\). Таким чином, будь-яку невертикальну лінію можна розглядати як сукупність кінцевих точок векторної суми\(\langle 0, b\rangle\) (вектора положення\(y\) -перехоплення) та скалярного вектора, кратного вектору нахилу\(\vec{s}=\langle 1, m\rangle\).
- Довести асоціативні та ідентичні властивості векторного додавання в теоремі 11.18.
- Довести властивості скалярного множення в теоремі 11.19.
11.8.2 Відповіді
-
- \(\vec{v}+\vec{w}=\langle 15,-1\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle-21,14\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=\sqrt{226}, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=18, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-21,77\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\left\langle\frac{60}{13},-\frac{25}{13}\right\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle-12,12\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle 9,-60\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=12 \sqrt{2}, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=38, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-34,-612\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\left\langle-\frac{91}{25}, \frac{312}{25}\right\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle 0,3\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle-6,6\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=3, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=3 \sqrt{5}, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-6 \sqrt{5}, 6 \sqrt{5}\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\langle 4,-2\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle 8,9\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle-22,-3\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=\sqrt{145}, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=3 \sqrt{29}, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-14 \sqrt{29}, 6 \sqrt{29}\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\langle 5,2\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle\sqrt{3}, 3\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle 4 \sqrt{3}, 0\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=2 \sqrt{3}, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=6, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle 8 \sqrt{3}, 0\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\langle-2 \sqrt{3}, 2\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\left\langle-\frac{1}{5}, \frac{7}{5}\right\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle-2,-1\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=\sqrt{2} \text {, scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=2, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\left\langle-\frac{7}{5},-\frac{1}{5}\right\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\left\langle\frac{3}{5}, \frac{4}{5}\right\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle 0,0\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\left\langle-\frac{3 \sqrt{2}}{2}, \frac{3 \sqrt{2}}{2}\right\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=0, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=2, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-\sqrt{2}, \sqrt{2}\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\left\langle\frac{\sqrt{2}}{2},-\frac{\sqrt{2}}{2}\right\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\left\langle-\frac{1}{2},-\frac{\sqrt{3}}{2}\right\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle-2,-2 \sqrt{3}\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=1, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=3, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-2,-2 \sqrt{3}\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\langle 1, \sqrt{3}\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle 3,2\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\langle-6,-10\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=\sqrt{13}, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=7, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\langle-6,-18\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\left\langle\frac{6}{5}, \frac{8}{5}\right\rangle, \text { vector }\)
-
- \(\vec{v}+\vec{w}=\langle 1,0\rangle, \text { vector }\)
- \(\vec{w}-2 \vec{v}=\left\langle-\frac{1}{2},-\frac{3}{2}\right\rangle, \text { vector }\)
- \(\|\vec{v}+\vec{w}\|=1, \text { scalar }\)
- \(\|\vec{v}\|+\|\vec{w}\|=\sqrt{2}, \text { scalar }\)
- \(\|\vec{v}\| \vec{w}-\|\vec{w}\| \vec{v}=\left\langle 0,-\frac{\sqrt{2}}{2}\right\rangle, \text { vector }\)
- \(\|w\| \hat{v}=\left\langle\frac{1}{2}, \frac{1}{2}\right\rangle, \text { vector }\)
- \(\vec{v}=\langle 3,3 \sqrt{3}\rangle\)
- \(\vec{v}=\left\langle\frac{3 \sqrt{2}}{2}, \frac{3 \sqrt{2}}{2}\right\rangle\)
- \(\vec{v}=\left\langle\frac{\sqrt{3}}{3}, \frac{1}{3}\right\rangle\)
- \(\vec{v}=\langle 0,12\rangle\)
- \(\vec{v}=\langle-2 \sqrt{3}, 2\rangle\)
- \(\vec{v}=\langle-\sqrt{3}, 3\rangle\)
- \(\vec{v}=\left\langle-\frac{7}{2}, 0\right\rangle\)
- \(\vec{v}=\langle-5 \sqrt{3},-5 \sqrt{3}\rangle\)
- \(\vec{v}=\langle 0,-6.25\rangle\)
- \(\vec{v}=\langle 6,-2 \sqrt{3}\rangle\)
- \(\vec{v}=\langle 5,-5\rangle\)
- \(\vec{v}=\langle 2,4\rangle\)
- \(\vec{v}=\langle-1,3\rangle\)
- \(\vec{v}=\langle-3,-4\rangle\)
- \(\vec{v}=\langle 24,-10\rangle\)
- \(\vec{v} \approx\langle-177.96,349.27\rangle\)
- \(\vec{v} \approx\langle 12.96,62.59\rangle\)
- \(\vec{v} \approx\langle 5164.62,1097.77\rangle\)
- \(\vec{v} \approx\langle-386.73,-230.08\rangle\)
- \(\vec{v} \approx\langle-52.13,-160.44\rangle\)
- \(\vec{v} \approx\langle 14.73,-21.43\rangle\)
- \(\|\vec{v}\|=2, \theta=60^{\circ}\)
- \(\|\vec{v}\|=5 \sqrt{2}, \theta=45^{\circ}\)
- \(\|\vec{v}\|=4, \theta=150^{\circ}\)
- \(\|\vec{v}\|=2, \theta=135^{\circ}\)
- \(\|\vec{v}\|=1, \theta=225^{\circ}\)
- \(\|\vec{v}\|=1, \theta=240^{\circ}\)
- \(\|\vec{v}\|=6, \theta=0^{\circ}\)
- \(\|\vec{v}\|=2.5, \theta=180^{\circ}\)
- \(\|\vec{v}\|=\sqrt{7}, \theta=90^{\circ}\)
- \(\|\vec{v}\|=10, \theta=270^{\circ}\)
- \(\|\vec{v}\|=5, \theta \approx 53.13^{\circ}\)
- \(\|\vec{v}\|=13, \theta \approx 22.62^{\circ}\)
- \(\|\vec{v}\|=5, \theta \approx 143.13^{\circ}\)
- \(\|\vec{v}\|=25, \theta \approx 106.26^{\circ}\)
- \(\|\vec{v}\|=\sqrt{5}, \theta \approx 206.57^{\circ}\)
- \(\|\vec{v}\|=2 \sqrt{10}, \theta \approx 251.57^{\circ}\)
- \(\|\vec{v}\|=\sqrt{2}, \theta \approx 45^{\circ}\)
- \(\|\vec{v}\|=\sqrt{17}, \theta \approx 284.04^{\circ}\)
- \(\|\vec{v}\| \approx 145.48, \theta \approx 328.02^{\circ}\)
- \(\|\vec{v}\| \approx 1274.00, \theta \approx 40.75^{\circ}\)
- \(\|\vec{v}\| \approx 121.69, \theta \approx 159.66^{\circ}\)
- Справжня швидкість човна становить близько 10 миль на годину в рубриці\(\mathrm{S} 50.6^{\circ} \mathrm{W}\).
- Справжня швидкість HMS Sasquatch становить близько 41 милі на годину в русі\(\mathrm{S} 26.8^{\circ} \mathrm{E}\).
- Вона повинна підтримувати швидкість близько 35 миль на годину при русі\(\mathrm{S} 11.8^{\circ} \mathrm{E}\).
- Вона повинна літати зі швидкістю 83.46 миль на годину із заголовком\(\mathrm{N} 22.1^{\circ} \mathrm{E}\)
- Струм рухається зі швидкістю близько 10 миль на годину підшипника\(\mathrm{N} 54.6^{\circ} \mathrm{W}\).
- Напруга на кожному з кабелів становить близько 346 фунтів.
- Максимальна вага, яку можуть утримувати кабелі в цій конфігурації, становить близько 133 фунтів.
- Натяг лівого троса становить 285,317 фунтів. а на правій руці - 92,705 фунтів.
- Більш слабкий школяр повинен тягнути близько 60 фунтів. Чиста сила на бочку становить близько 153 фунтів.
- Отримана сила становить лише близько 296 фунтів, тому диван не зрушується з місця. Навіть якби він рухався, сильніша сила на третій мотузці змусила б диван трохи дрейфувати на південь, коли він їхав по вулиці.
Довідка
1 Слово «вектор» походить від латинського vehere, що означає «транспортувати» або «нести».
2 Інші автори підручників використовують жирні вектори, такі як\(\boldsymbol{v}\). Ми виявляємо, що писати жирним шрифтом на дошці в кращому випадку незручно, тому ми вибрали позначення «стрілка».
3 Якщо ця ідея «над» і «вгору» здається знайомою, вона повинна. Нахил відрізка лінії, що містить\(\vec{v}\) дорівнює\(\frac{4}{3}\).
4 При необхідності перегляньте сторінку 905 і розділ 11.3.
5 Тобто швидкість літака щодо повітря навколо нього. Якби не було вітру, швидкість польоту літака була б такою ж, як і його швидкість, яка спостерігається з землі. Як на це впливає вітер? Продовжуйте читати!
6 Див. розділ 10.1.1, наприклад.
7 Або, оскільки наш заданий кут\(100^{\circ}\), тупий, ми могли б використовувати Закон Синеса без будь-якої неоднозначності тут.
8 Додавання векторів «компонентно-мудрим» має здатися звично знайомим. Порівняйте це з тим, як було визначено додавання матриць у розділі 8.3. Насправді, в більш просунутих курсах, таких як Лінійна алгебра, вектори визначаються як\(1 \times n\) або\(n \times 1\) матриці, залежно від ситуації.
9 Зацікавленому читачеві пропонується порівняти теорему 11.18 та подальшу дискусію з теоремою 8.3 у розділі 8.3 та обговорення там.
10 Якщо це все виглядає звично, це повинно. Зацікавленому читачеві пропонується порівняти визначення 11.8 з визначенням 11.2 у розділі 11.7.
11 Звичайно, щоб перейти від\(\vec{v}=\|\vec{v}\| \hat{v}\) до\(\hat{v}=\left(\frac{1}{\|\vec{v}\|}\right) \vec{v}\), ми по суті «ділимо обидві сторони» рівняння скаляром\(\|\vec{v}\|\). Однак автори заохочують читача ретельно опрацювати деталі, щоб отримати оцінку властивостей у грі.
12 Через корисність векторів у «реальних» додатках ми зазвичай використовуємо градусну міру для кута, коли вказуємо напрямок вектора. Однак, оскільки Карл не хоче, щоб ви забули про радіани, він переконався, що є приклади та вправи, які їх використовують.
13 Зберігання речей «калькулятор» дружнім, на один раз!
14 Так, наближення калькулятора - це найшвидший спосіб побачити це, але ви також можете використовувати старі добрі нерівності та те, що\(45^{\circ} \leq 50^{\circ} \leq 60^{\circ}\).
15 Один доказ використовує властивості скалярного множення і величини. Якщо\(\vec{v} \neq \overrightarrow{0}\), врахуйте\(\|\hat{v}\|=\left\|\left(\frac{1}{\|\vec{v}\|}\right) \vec{v}\right\|\). Використовуйте той факт, що\(\|\vec{v}\| \geq 0\) є скалярним і розгляньте факторинг.
16.\(\|\vec{v}\|>1\). якщо.
17 Ми побачимо узагальнення теореми 11.21 у розділі 11.9. Слідкуйте за оновленнями!
18 Див. також розділ 11.1.1.
19 Це критерії «статичного рівноправності».