5.1.1: Позиції та середні точки у двох вимірах
- Page ID
- 55176
Позиції та середні точки у двох вимірах
Цифровий графік розробляє новий логотип компанії. В даний час вона ескізує зразок на графічному папері, щоб показати своєму клієнту, і їй потрібно знайти центр тексту, який вона намалювала, щоб вона могла правильно вирівняти ілюстрацію.
Якщо вона знає, що перша буква починається 10 ящиків вгору і 5 ящиків над з нижнього лівого кута сторінки, а остання буква закінчується 12 ящиками вгору і 32 коробки над тим же кутом, як вона могла знайти центр?
Позиції та середні точки у двох вимірах
Ефективне використання системи координат
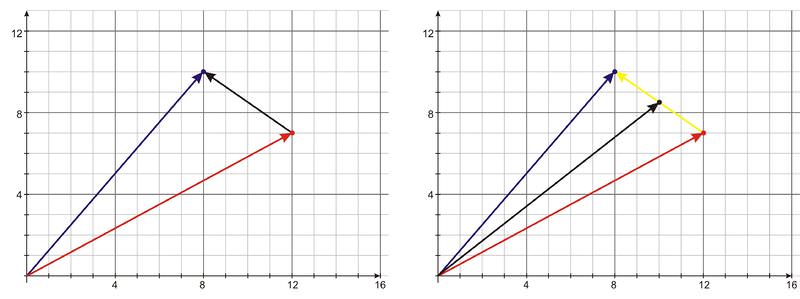
У минулому, коли ви використовували систему координат для побудови графіків в алгебрі та геометрії, ви, ймовірно, добре знайомі з осями x/y, що працюють вліво/вправо і вгору/вниз на сторінці, з 0 в центрі. У більш просунутій математиці, а також у фізиці чи інших дослідженнях руху, ви виявите, що часто набагато простіше замість цього перемістити графік, щоб вирівняти один вектор, ніж вирівняти всі вектори, які ви обчислюєте, зі стандартною орієнтацією.
Вирівнюючи один з декількох векторів за віссю x або y, та/або встановивши початок графіка на початку вектора, ви мінімізуєте складність обчислень.
Вектори між двома точками
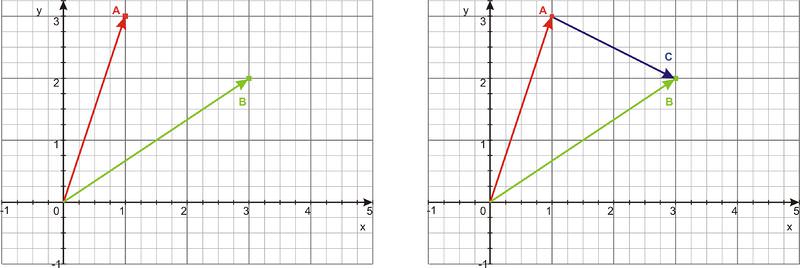
Вектор displacement представляє рух, що починається в одній точці і закінчується в іншій. На діаграмі нижче вектор C починається в точці A і закінчується в точці B. Це означає, що\(\ \vec{A}+\vec{C}=\vec{B}\) і\(\ \vec{C}=\vec{B}-\vec{A}\). У цьому випадку\(\ \vec{A}=\langle 1,3\rangle\) і, отже\(\ \vec{B}=\langle 3,2\rangle\),\(\ \vec{C}=\langle(3-1),(2-3)\rangle=\langle 2,-1\rangle\) узгодження того, що ми можемо побачити на схемі.
Вектор до точки між двома точками
Художники комп'ютерної графіки часто повинні знати розташування точки, яка лежить посередині між двома іншими точками. Як тільки ми дізнаємося вектори положення для двох дискретних точок, ми можемо визначити середину між ними, використовуючи їх координати. Зокрема, середина між точками A і B є «середнім» двох позицій, тому координати середньої точки задаються\(\ x_{m p}=\frac{1}{2}\left(x_{A}+x_{B}\right),\ y_{m p}=\frac{1}{2}\left(y_{A}+y_{B}\right)\)\(\ z_{m p}=\frac{1}{2}\left(z_{A}+z_{B}\right)\) і вектор положення для середньої точки може бути записаний як\(\ P_{m p}=\left\langle x_{m p}, y_{m p}, z_{m p}\right\rangle\). Вектор від будь-якої іншої точки до цієї середньої точки можна потім обчислити за допомогою методу, описаного в нашому обговоренні векторів зміщення.
"рамка = «0" висота = «450px» ім'я = «92185" src =» https://www.ck12.org/flx/show/video/...rmula-Overview "URL-адресу мініатюри ="» заголовок = «Відеооб'єкт? хеш = f261914a433f4b13bcc48ed403f01e96" дата завантаження = «2016-07-07 20:43:28" ширина =» 85% «>
Приклади
Раніше вам ставили задачу про знаходження центру тексту на аркуші графського паперу.
Рішення
Якщо вона знає, що перша буква починається 10 ящиків вгору і 5 ящиків над з нижнього лівого кута сторінки, а остання буква закінчується 12 ящиками вгору і 32 коробки над тим же кутом, як вона могла знайти центр?
Це питання середньої точки, тому обчислення координат x:
\(\ x_{m p}=\frac{1}{2}\left(x_{A}+x_{B}\right)=\frac{1}{2}(5+32)=18.5\)
і y-координата середньої точки задається:\(\ y_{m p}=\frac{1}{2}\left(y_{A}+y_{B}\right)=\frac{1}{2}(10+12)=11\)
Координата центру дорівнює: 18,5, 11.
Рух об'єкта по похилій площині - дуже поширена проблема у вступній фізиці. На схемі нижче показана одна з таких ситуацій.
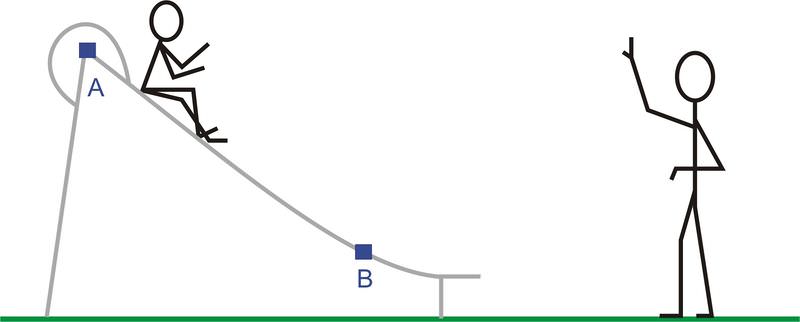
Stickman Beauford взяв свою племінницю Бринну в парк і хвилі до неї, як вона грає на слайді. Виберіть дві системи координат, які можуть бути використані для опису руху Бринни та визначення векторів положення для точок A та B в обох системах координат.
Рішення
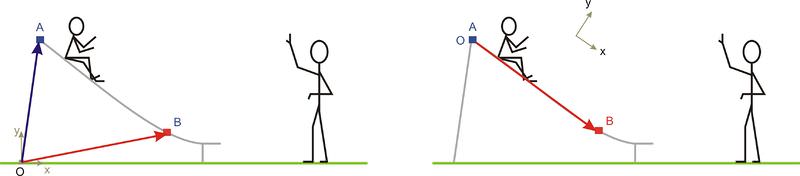
Якщо ми хочемо описати рух Бринни, коли вона рухається з точки А в точку Б вздовж слайда, ми могли б використовувати стандартну горизонтальну та вертикальну систему координат з початком біля основи сходів слайда, але тоді вектор, що описує її рух, матиме компоненти як у напрямках x, так і у. Наш математичний опис її руху можна значно спростити, якщо ми виберемо точку А як початок, і якщо ми повернемо систему координат таким чином, щоб вісь x паралельна слайду, а вісь y перпендикулярна слайду. Тепер рух Бринни від точки А до точки Б здійснюється тільки вздовж осі x. Зверніть увагу, можливі й інші варіанти походження.

Після того, як ми визначили осі початку та координат для наших опорних кадрів, ми можемо використовувати векторні позначення для визначення розташування точок A та B. Вектор положення для точки А - це вектор, що починається з початку та закінчується в точці A,\(\ \overrightarrow{O A}\). Для стандартної системи координат, показаної зліва вище, вектори положення\(\ \overrightarrow{O A}\) і\(\ \overrightarrow{O B}\) показані зліва нижче. Для поверненої системи координат, показаної праворуч вгорі, вектор положення\(\ \overrightarrow{O A}=0\) і\(\ \overrightarrow{O B}=\overrightarrow{A B}\).
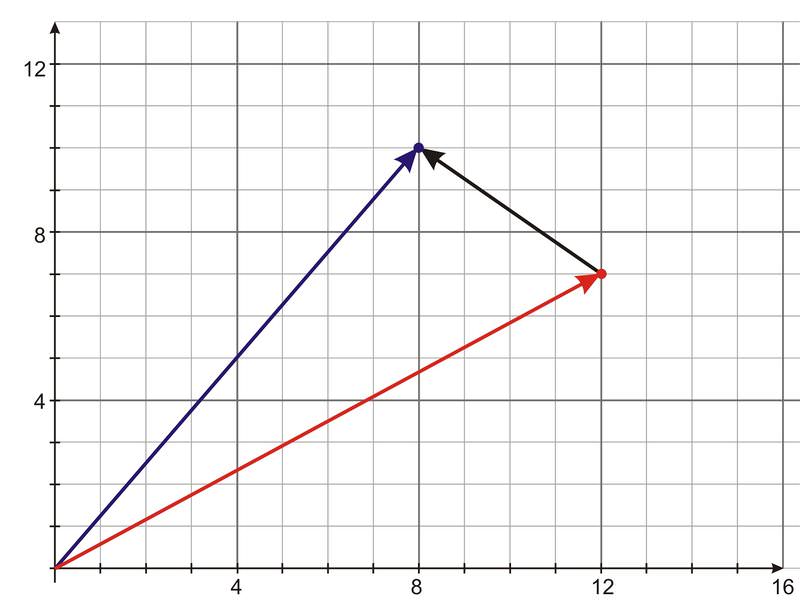
Визначте координати і величину вектора D, починаючи з точки\(\ \overrightarrow{P_{1}}=\langle 12,7\rangle\) і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 8,10\rangle\).
Рішення
Вектор зміщення D - це різниця між двома векторами положення:.
\(\ D=\left\langle P_{2 x}-P_{1 x}, P_{2 y}-P_{1 y}\right\rangle=\langle 8-12,10-7\rangle=\langle-4,3\rangle\).
Величину вектора, D, можна знайти за допомогою теореми Піфагора:
\(\ |\vec{D}|=\sqrt{(-4)^{2}+(3)^{2}}=\sqrt{25}=5\)
Визначте вектор положення, що ідентифікує середину між точками\(\ \overrightarrow{P_{1}}=\langle 12,7\rangle\) і\(\ \overrightarrow{P_{2}}=\langle 8,10\rangle\).
Рішення
Оскільки ці дві точки розташовані в площині x-y, координата x середньої точки задається
\(\ x_{m p}=\frac{1}{2}\left(x_{A}+x_{B}\right)=\frac{1}{2}(12+8)=10\)
і y-координата середньої точки задається
\(\ y_{m p}=\frac{1}{2}\left(y_{A}+y_{B}\right)=\frac{1}{2}(7+10)=8.5\)
Тому вектор положення для цієї середньої точки можна записати як
\(\ P_{m p}=\langle 10,8.5\rangle\)
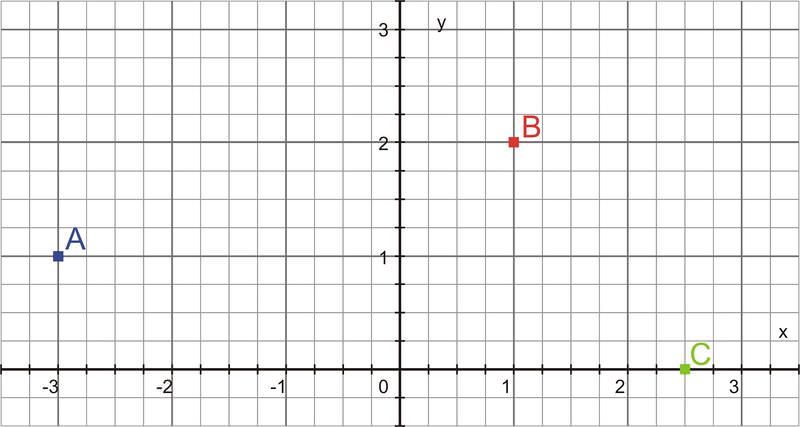
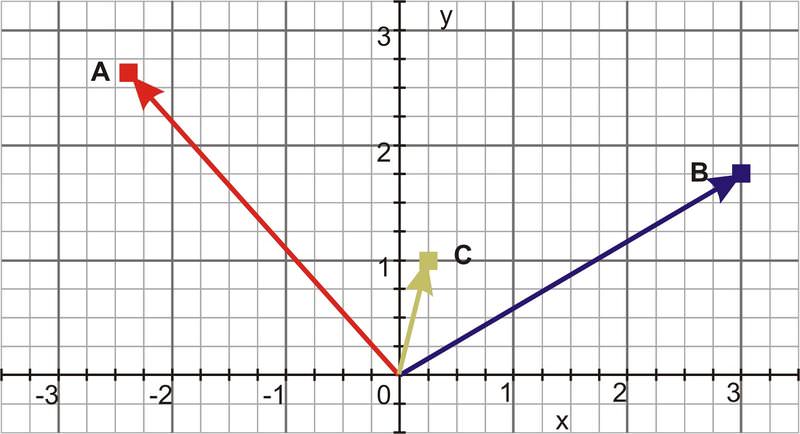
Визначте вектори положення для трьох точок, показаних на сітці нижче.
Рішення
Вектори позиції починаються з початку (0, 0) і закінчуються в кожній точці:
\(\ \overrightarrow{O A}=\langle-3,1\rangle, \overrightarrow{O B}=\langle 1,2\rangle \text { and: } \overrightarrow{O C}=\langle 2.5,0\rangle\)
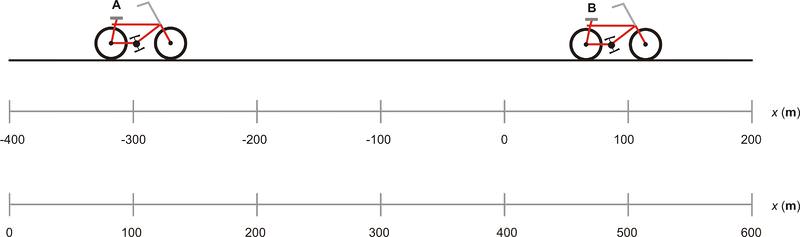
На схемі показано два положення велосипеда, коли він рухається по довгій прямій дорозі. Дві можливі системи координат руху наведені нижче. Визначте вектори положення в кожній з двох систем координат для велосипеда в точках А і В. Потім визначте вектор переміщення від А до В в кожному конкретному випадку. (Не намальовано в масштабі.)
Рішення
На схемі показано два положення велосипеда, коли він рухається по довгій прямій дорозі. Дві можливі системи координат руху наведені нижче. Визначте вектори положення в кожній з двох систем координат для велосипеда в точках А і В. Потім визначте вектор переміщення від А до В в кожному конкретному випадку.
Для верхньої системи координат вектор положення велосипеда в точці А задається\(\ \overrightarrow{r_{A}}=\langle-300 m, 0,0\rangle\) і що в точці B задається\(\ \overrightarrow{r_{B}}=\langle 100 m, 0,0\rangle\). Це дає зміщення\(\ \overrightarrow{\triangle r_{A-B}}=\langle(100 m-(-300 m)),(0-0),(0-0)\rangle=\langle 400 m, 0,0\rangle\).
Для верхньої системи координат вектор положення велосипеда в точці А задається\(\ \overrightarrow{r_{A}}=\langle 100 m, 0,0\rangle\) і що в точці B задається\(\ \overrightarrow{r_{B}}=\langle 500 m, 0,0\rangle\). Це дає зміщення\(\ \overrightarrow{\triangle r_{A-B}}=\langle(500 m-100 m),(0-0),(0-0)\rangle=\langle 400 m, 0,0\rangle\).
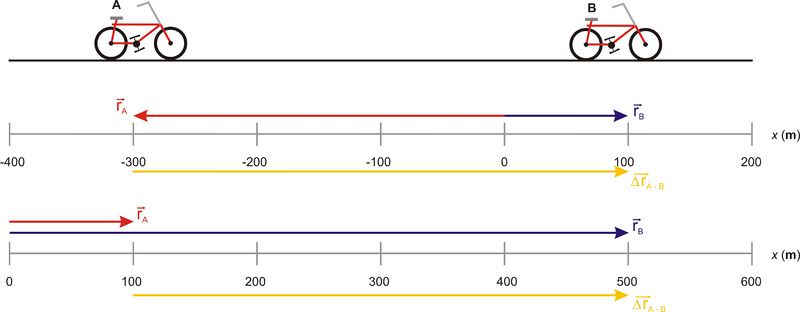
Вектори положення велосипеда в точці А показані червоним кольором, а вектори положення для точки B показані синім кольором. Вектор зміщення між точками А і В показаний золотом. Як бачите, вектори положення, що представляють цей рух, залежать від вибору системи координат, але вектор зміщення не залежить від системи координат. Незалежно від того, як ми визначаємо походження, велосипед рухається на 400 м у напрямку + x і не рухається в напрямку y або z.
Визначте вектори положення для трьох точок, показаних на діаграмі нижче.
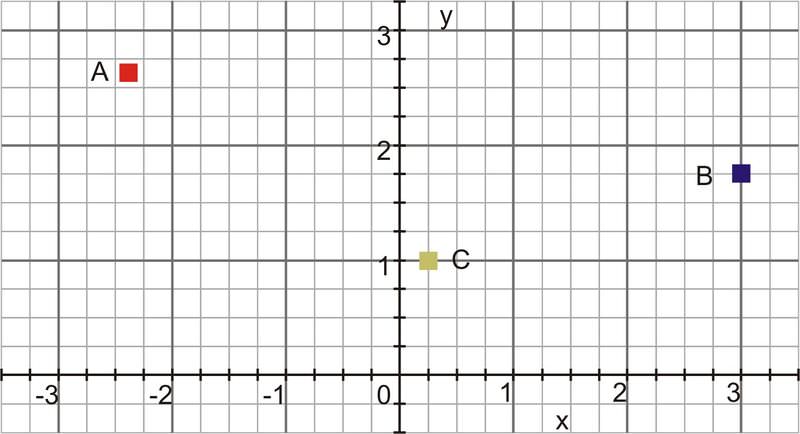
Рішення
\(\ \overrightarrow{r_{A}}=\langle-2.63,2.63,0\rangle, \overrightarrow{r_{B}}=\langle 3,1.75,0\rangle, \overrightarrow{r_{C}}=\langle 0.25,1,0\rangle\)
Рецензія
- Для чого використовується вектор зміщення?
Визначте координати і величину вектора зміщення, D, починаючи з точки\(\ \overrightarrow{P_{1}}\) і закінчуючи на\(\ \overrightarrow{P_{2}}\).
- \(\ overrightarrow{P_{1}}=\langle 25,3\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 8,11\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 5,3\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 7,9\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 21,18\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 4,15\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 8,5\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 5,8\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 16,25\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 9,11\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 14,3\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 23,20\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 11,4\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 15,11\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 23,13\rangle\)і закінчуючи на\(\ \overrightarrow{P_{2}}=\langle 1,17\rangle\)
Визначте вектор положення, що ідентифікує середню точку між точками\(\ \overrightarrow{P_{1}}\) і\(\ \overrightarrow{P_{2}}\)
- \(\ \overrightarrow{P_{1}}=\langle 17,6\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 18,12\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 2,5\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 1,9\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 24,7\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 21,10\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 12,9\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 2,20\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 15,17\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 18,1\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 22,14\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 23,8\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 1,7\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 14,21\rangle\)
- \(\ \overrightarrow{P_{1}}=\langle 3,9\rangle\)і\(\ \overrightarrow{P_{2}}=\langle 8,1\rangle\)
Лексика
| Термін | Визначення |
|---|---|
| Вектор зміщення | Вектор зміщення моделює рух між однією точкою та іншою на координатній площині. |
| середина | Середина двох векторів - це розташування в центрі їх кінцевих точок. |
| вектор положення | Вектор положення описує пряму лінію між початковою точкою (зазвичай початковою точкою) і розташуванням другої точки на координатній площині. |