4.1: Керуючі рівняння
- Page ID
- 32954

Поки ми встановили три групи рівнянь, які повністю характеризують реакцію балок на різні типи навантаження. У главі 1 були встановлені відносини для обчислення деформацій з поля зміщення.
\[\epsilon(x, z) = \epsilon^{\circ}(x) + z\kappa\]
де
\[\epsilon^{\circ}(x) = \frac{du}{dx} + \frac{1}{2} \left( \frac{dw}{dx} \right)^2 \; , \; \kappa = −\frac{d^2w}{dx^2} \label{4.1.2}\]
Вищезазначені геометричні відносини є незалежними від рівноваги і застосовуються до будь-якого виду матеріалів.
Другий набір рівнянь, виведений у главі 2, є вимогою рівноваги
\[\frac{dV^*}{dx} + q(x) = 0 \quad − \quad \text{ force equilibrium}\]
\[\frac{dM}{dx} - V = 0 \quad − \quad \text{ moment equilibrium} \label{4.1.4}\]
де\(V^* = V + N \frac{dw}{dx}\) ефективний зсув.
\[\frac{dN}{dx} = 0 \]
Усуваючи\(V\) та\(V^*\) між вищезазначеними рівняннями, отримано рівняння рівноваги пучка (див. Рівняння (2.7.1))
\[\frac{d^2M}{dx^2} + N\frac{d^2w}{dx^2} + q = 0 \label{4.1.7}\]
Виведення рівноваги справедливо для всіх типів матеріалів. У теорії помірно великих прогинів рівновага пов'язана з кінематикою.
Третя група рівнянь визначає поведінку матеріалу і пов'язує узагальнені деформації з узагальненими силами.
\[N = EA\epsilon^{\circ} \label{4.1.8}\]
\[M = EI\kappa \label{4.1.9}\]
Незалежність геометрії та рівноваги від конституційного рівняння дозволяє розробити загальні рамки розв'язувача в кодах скінченних елементів. Установчі рівняння потім можуть бути додані як визначені користувачем підпрограми.
Розглянемо спочатку нескінченно малі деформації (малі обертання), для яких термін\(\frac{1}{2} \left( \frac{dw}{dx} \right)^2\) зникає в Equation\ ref {4.1.2} та термін\(\frac{d^2w}{dx^2} = 0\) у Equation\ ref {4.1.7}. Потім з рівнянь\ ref {4.1.2},\ ref {4.1.4} і\ ref {4.1.8} отримується
\[EA\frac{d^2u}{dx^2} = 0\]
Усуваючи кривизну і згинальні моменти між рівняннями\ ref {4.1.2},\ ref {4.1.7} і\ ref {4.1.9}, отримано рівняння прогину променя
\[EI\frac{d^4w}{dx^4} = q(x) \label{4.1.11}\]
Зосереджене навантаження\(P\) можна розглядати як окремий випадок розподіленого навантаження\(q(x) = P \delta(x − x_0)\), де\(\delta\) є дельта-функція Дірака.
Розглянемо перше рівняння\ ref {4.1.4} для осьового зміщення. Граничні умови в\(x\) -напрямку є
\[(N − \bar{N})\delta u = 0\]
Загальне рішення\(u(x)\) для
\[\frac{du}{dx} = D_1 \; , \; u = D_1x + D_0 \label{4.1.13}\]
Є дві константи інтеграції, і потрібні дві граничні умови. Існує всього чотири комбінації граничних умов:
1. Балка обмежена від осьового руху, див. Рис.\(\PageIndex{1}\)
\[u(x = 0) = u(x = l) = 0\]
Це дає початок розв'язку двох алгебраїчних рівнянь
\[0 = D_0 + D_1 \cdot 0\]
\[0 = D_0 + D_1l\]
який дає\(D_0 = D_1 = 0\) і\(u(x) = 0\). Це банальний випадок, для якого також\(N = EA\frac{du}{dx}\) зникає осьова сила.
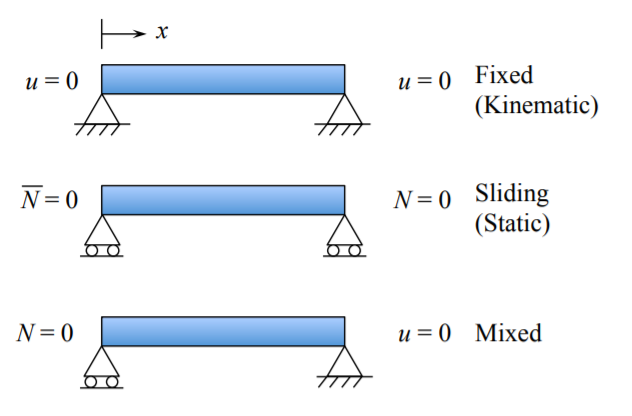
2. Балка допускається ковзати в\(x\) -напрямку на обох кінцях.
\[\bar{N} = N = 0 \text{ at } x = 0 \text{ and } x = l\]
Осьова сила пропорційна\(\frac{du}{dx}\). З Equation\ ref {4.1.13} ми бачимо, що градієнт\(u\) дорівнює нулю вздовж всього променя. Отже, якщо\(\bar{N} = 0\) або\(\frac{du}{dx}\) зникає на одному кінці, скажімо\(x = 0\),\(D_1 = 0\) і автоматично\(\bar{N} = 0\) задовольняється на іншому кінці,\(x = l\). Константа інтеграції\(D_0\) є невизначеною, що означає, що допускається трансляція твердого тіла всієї балки.
3. Щоб запобігти трансляції жорсткого тіла, один кінець балки, скажімо\(x = 0\), повинен бути зафіксований проти руху в\(x\) -напрямку. Таким чином
\[\bar{N} = 0 \text{ or } \frac{du}{dx} = 0 \quad \text{ at } \quad x = 0\]
\[u = 0 \quad \text{ at } \quad x = l\]
які є саме граничними умовами для третього випадку. З рівняння\ ref {4.1.13} отримуємо
\[D_1 = 0\]
\[D_1l + D_2 = 0 \rightarrow D_2 = 0 \]
Тепер осьовий зсув зникає,\(u(x) = 0\) але переклад жорсткого тіла усувається.
Для всіх перерахованих вище трьох випадків кінематичних статичних і змішаних граничних умов осьова сила дорівнювала нулю.
4. Якщо один кінець балки (бруса) навантажений заданою силою,\(\bar{N}\) а інший закріплений, граничні умови (БК) складають
\[\begin{array}{lcl} N = -\bar{N} \; , \; EA\frac{du}{dx} = 0 & \text{ at } x = 0 \\ u = 0 & \text{ at } x = l \end {array}\]
\[D_1 = − \frac{\bar{N}}{EA} \; , \; D_2 = \frac{\bar{N}l}{EA}\]
і рішення
\[u(x) = \frac{\bar{N}}{EA} (l − x)\]
Набагато цікавіший випадок, коли нелінійний член зберігається в Equation\ ref {4.1.2}. Це буде розбиратися в розділі про помірно великому прогині балок.
Тепер звернемо увагу на рішення прогину балки, Equation\ ref {4.1.11}. Це лінійне неоднорідне рівняння четвертого порядку, яке вимагає чотирьох граничних умов. Існує чотири типи граничних умов, що визначаються
\[(M − \bar{M})\delta w^{\prime} = 0\]
\[(V − \bar{V}) \delta w = 0\]
Для ілюстрації вибираємо штифт БК для балки, завантаженої рівномірним подібним навантаженням\(q\), Рисунок (\(\PageIndex{2}\)).
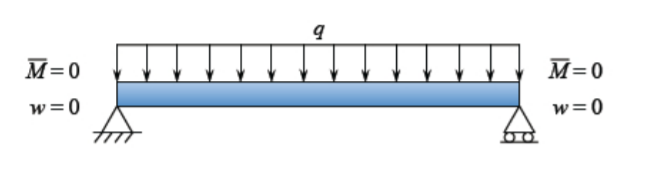
Згинальний момент пропорційний кривизні. Рівняння\ ref {4.1.11} потім піддається наступним граничним умовам:
\[w(x = 0) = w(x = l) = 0\]
\[\left. \frac{d^2w}{dx^2}\right|_{x=0} = \left. \frac{d^2w}{dx^2} \right|_{x=l} = 0 \]
Давайте інтегруємо диференціальне рівняння чотири рази щодо\(x\):
\[\begin{align} \frac{d^3w}{dx^3} &= \frac{qx}{EA} + C_1 \\[4pt] \frac{d^2w}{dx^2} &= \frac{qx^2}{EA2} + C_1x + C_2 \\[4pt] \frac{dw}{dx} &= \frac{qx^3}{EA6} + \frac{C_1x^2}{2} + C_2x + C_3 \\[4pt] w &= \frac{qx^4}{EA24} + \frac{C_1x^3}{6} + \frac{C_2x^2}{2} + C_3x + C_4 \end{align}\]
Підставляючи БК в загальні розв'язки, один отримує
\[0 = C_2\]
\[0 = \frac{ql^3}{2EA} + {C_1}l + C_2 \]
\[0 = C_4\]
\[0 = \frac{ql^4}{24EA} + \frac{C_1l^3}{6} + \frac{C_2l^2}{2} + C_3l + C_4 \]
Рішенням вищевказаної системи є
\[C_1 = −\frac{ql}{2}\]
\[C_2 = 0\]
\[C_3 = \frac{ql^3}{12}\]
\[C_4 = 0\]
Відношення навантаження-переміщення стає
\[w(x) = \frac{qx}{24EA}(l^3 - 2lx^2 + x^3) \label{4.1.40}\]
Диференціююче рівняння\ ref {4.1.40} двічі, вираз для згинального моменту дорівнює
\[M(x) = \frac{qx}{2} (l − x)\]
і диференціюючи знову, сила зсуву стає
\[V(x) = \frac{dM}{dx} = \frac{q}{2} (l − 2x)\]
Графіки нормованих згинальних моментів і сил зсуву наведені на малюнку (\(\PageIndex{3}\)).
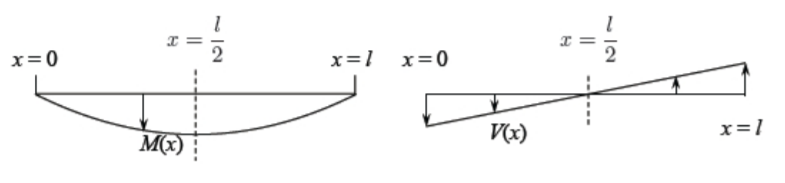
Зсувна сила\(V = EI\frac{d^3w}{dx^3}\), як видно, зникає в середині прольоту балки. Також ухил\(\frac{dw}{dx}\) дорівнює нулю в цьому місці. Доведено, що на площині симетрії
\[V (x = \frac{l}{2} ) = 0 \label{4.1.43}\]
\[\left. \frac{dw}{dx}\right|_{x= \frac{l}{2}} = 0 \label{4.1.44}\]
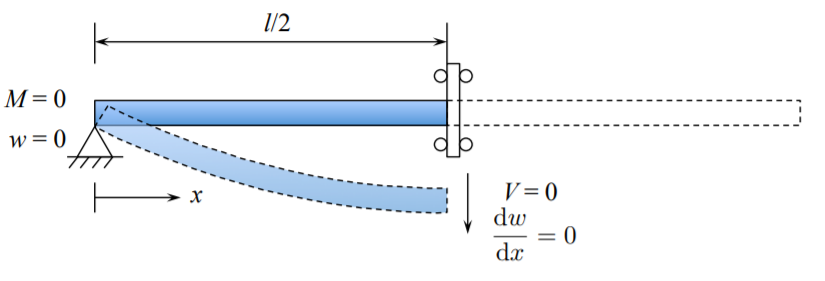
І навпаки, якщо задача симетрична, то рівняння\ ref {4.1.43} -\ ref {4.1.44} повинні триматися на площині симетрії. В якості альтернативної формулювання можна розглянути половину пучка з симетрією до н.е.
Чи можете ви вирішити вищезазначену задачу і порівняти її з розв'язком штифтового пучка, Equation\ ref {4.1.40}?
Слід зазначити, що опорна балка з штифтовим штифтом є статично визначальною конструкцією. Тому розподіл зсувних сил і згинальних моментів можна визначити лише з рівняння рівноваги. Чи можете ви це зробити і правильно отримати знаки?
Мета глави 4 - представити властивості керівних рівнянь та розв'язків. Зацікавлені студенти посилаються на кінцеву главу множин задач, де розглянуто багато пучків з різним навантаженням та БК. Також рекомендований довідник і монографії представляють рішення деяких поширених проблем променя.