2.4: Закон Біот-Саварта
- Page ID
- 30904

Закон Біот-Саварта (BSL) передбачає метод розрахунку магнітного поля за рахунок будь-якого розподілу сталого (постійного) струму. У магнітостатиці загальне рішення цієї проблеми використовує закон Ампера; т. Е.
\[\int_{\mathcal C} {\bf H} \cdot d{\bf l} = I_{encl} \nonumber \]
в цілісній формі або
\[\nabla \times {\bf H} = {\bf J} \nonumber \]
в диференційній формі. Інтегральна форма відносно проста, коли задача проявляє високий ступінь симетрії, полегшуючи простий опис в тій чи іншій системі координат. Прикладом може служити магнітне поле, обумовлене прямою і нескінченно довгою ниткою струму, яка легко визначається вирішенням інтегрального рівняння в циліндричних координатах. Однак багато проблем, що становлять практичний інтерес, не виявляють необхідної симетрії. Найпоширенішим прикладом є магнітне поле, обумовлене єдиним контуром струму, яке буде розглянуто в прикладі\(\PageIndex{1}\). Для таких проблем потрібна диференціальна форма закону Ампера.
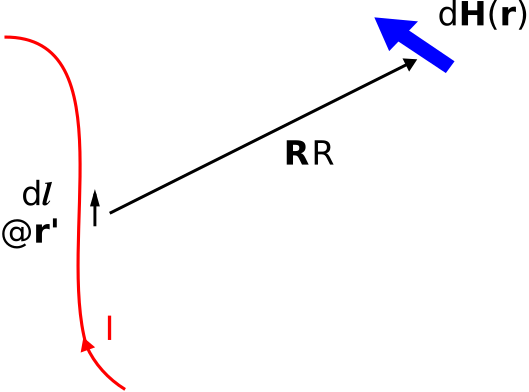
BSL - це розв'язання диференціальної форми закону Ампера для елемента струму диференціальної довжини, проілюстрованого на рис\(\PageIndex{1}\). Поточний елемент - це\(I~d{\bf l}\), де\(I\) величина струму (СІ базові одиниці А) і\(d{\bf l}\) являє собою диференціально-довжину вектор, що вказує напрямок струму в «вихідній точці»\({\bf r}'\). Отриманий внесок в напруженість магнітного поля в «точці поля»\({\bf r}\) становить
\[\boxed{ d{\bf H}({\bf r}) = I~d{\bf l}~\frac{1}{4\pi R^2} \times \hat{\bf R} } \label{m0066_eBS} \]
де
\[{\bf R} = \hat{\bf R}R \triangleq {\bf r} - {\bf r}' \nonumber \]
Іншими словами,\({\bf R}\) це вектор, що вказує від вихідної точки до точки поля, а\(d{\bf H}\) в точці поля задається Equation\ ref {M0066_EBS}. Магнітне поле за рахунок струмоведучого проводу будь-якої форми може бути отримано шляхом інтеграції по довжині дроту:
\[{\bf H}({\bf r}) = \int_{\mathcal{C}} d{\bf H}({\bf r}) = \frac{I}{4\pi} \int_{\mathcal{C}} \frac{d{\bf l}\times \hat{\bf R}}{R^2} \label{m0066_eBSI} \]
На додаток до усунення необхідності розв'язання диференціального рівняння, BSL надає деяке корисне уявлення про поведінку магнітних полів. Зокрема, Equation\ ref {M0066_EBS} вказує на те, що магнітні поля слідують закону зворотного квадрата — тобто величина магнітного поля внаслідок диференціального елемента струму зменшується пропорційно оберненому квадрату відстані (\(R^{-2}\)). Також Equation\ ref {M0066_EBS} вказує на те, що напрямок магнітного поля за рахунок диференціального елемента струму перпендикулярно як напрямку потоку струму, так\(\hat{\bf l}\) і вектору, що\(\hat{\bf R}\) вказує від вихідної точки до точки поля. Це спостереження є досить корисним для передбачення напрямку векторів магнітного поля в складних задачах.
Може бути корисним відзначити, що BSL є аналогом закону Кулона для електричних полів, який є розв'язком диференціальної форми закону Гауса,\(\nabla \cdot {\bf D} = \rho_v\). Однак BSL застосовується тільки в магнітостатичних умовах. Якщо зміна струмів або магнітних полів з плином часу значна, то проблема значно ускладнюється. Див. розділ «Рівняння Єфіменка» у розділі «Додаткове читання» для отримання додаткової інформації.
Розглянемо кільце радіуса\(a\) в\(z=0\) площині, зосереджене на початку координат, як показано на малюнку\(\PageIndex{2}\).
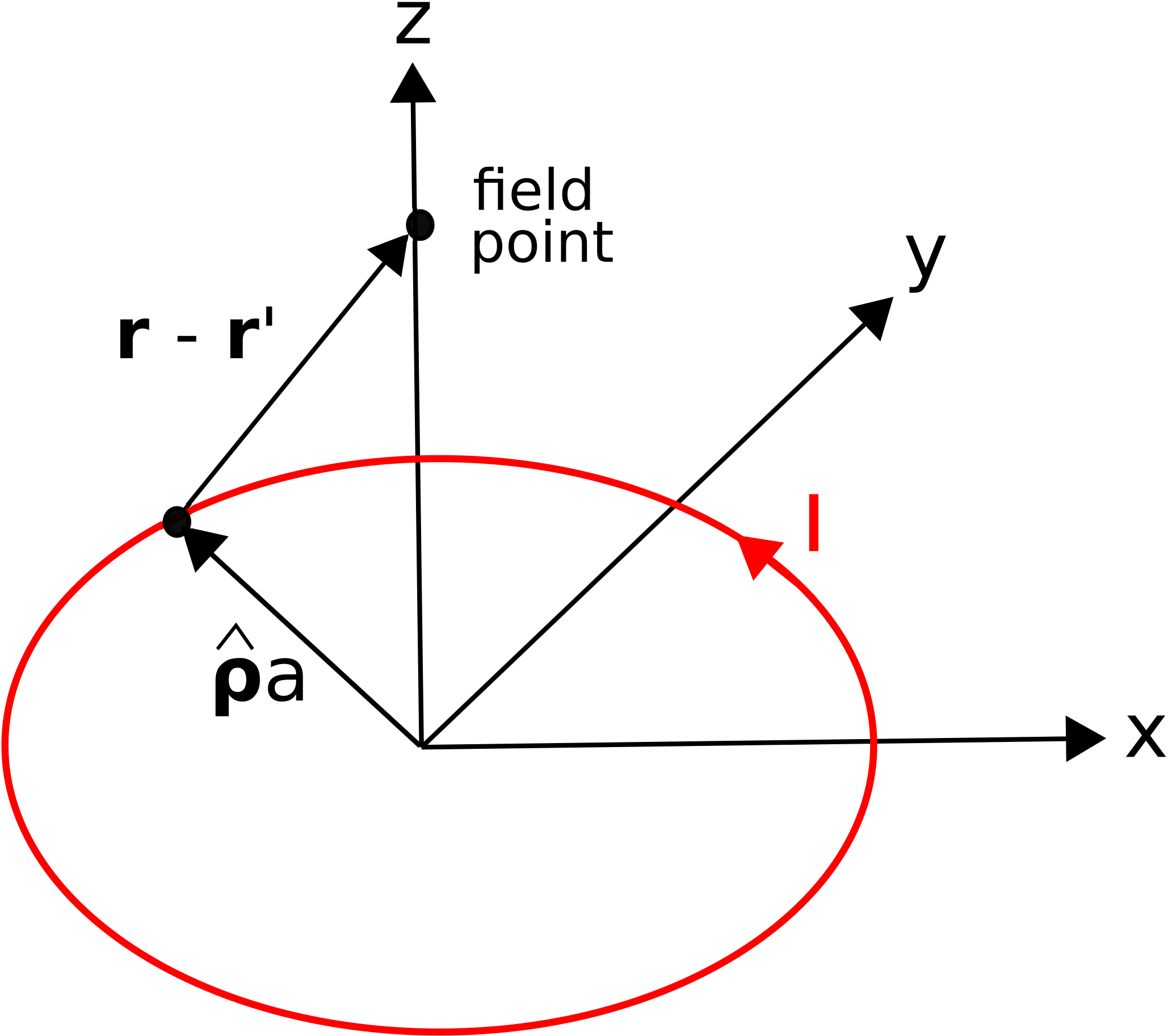
Як зазначено на малюнку, струм\(I\) тече в\(\hat{\bf \phi}\) напрямку. Знайдіть напруженість магнітного поля уздовж\(z\) осі.
Рішення
Положення вихідного струму задається в циліндричних координатах як
\[{\bf r}' = \hat{\bf \rho}a \nonumber \]
Положення точки поля вздовж\(z\) осі дорівнює
\[{\bf r} = \hat{\bf z}z \nonumber \]
Таким чином,
\[\hat{\bf R}R \triangleq {\bf r}-{\bf r}' = -\hat{\bf \rho}a + \hat{\bf z}z \nonumber \]
і
\[R \triangleq \left|{\bf r}-{\bf r}'\right| = \sqrt{a^2+z^2} \nonumber \]
Рівняння\ ref {M0066_EBS} стає:
\[\begin{aligned} d{\bf H}(\hat{\bf z}z) &= \frac{I~\hat{\bf\phi}~ad\phi}{4\pi \left[a^2+z^2\right]} \times \frac{\hat{\bf z}z-\hat{\bf \rho}a}{\sqrt{a^2+z^2}} \nonumber \\ &= \frac{Ia}{4\pi} ~ \frac{ \hat{\bf z}a-\hat{\bf \rho}z }{\left[a^2+z^2\right]^{3/2}} ~ d\phi\end{aligned} \nonumber \]
Тепер інтеграція над поточним:
\[\begin{aligned} &{\bf H}(\hat{\bf z}z) = \int_{0}^{2\pi} { \frac{Ia}{4\pi} ~ \frac{ \hat{\bf z}a - \hat{\bf \rho}z }{\left[a^2+z^2\right]^{3/2}} ~ d\phi }& \end{aligned} \nonumber \]
\[\begin{aligned} &= \frac{Ia}{4\pi \left[a^2+z^2\right]^{3/2}} \int_{0}^{2\pi} { \left( \hat{\bf z}a - \hat{\bf \rho}z \right) ~ d\phi }& \end{aligned} \nonumber \]
\[\begin{aligned} &= \frac{Ia}{4\pi \left[a^2+z^2\right]^{3/2}} \left( \hat{\bf z}a \int_{0}^{2\pi} { d\phi } -z \int_{0}^{2\pi} { \hat{\bf \rho} ~ d\phi }\right)&\end{aligned} \nonumber \]
Другий інтеграл дорівнює нулю. Щоб переконатися в цьому, зверніть увагу, що інтеграл просто підсумовує значення\(\hat{\bf\rho}\) для всіх можливих значень\(\phi\). Оскільки\(\hat{\bf\rho}(\phi+\pi)=-\hat{\bf\rho}(\phi)\), integrand для будь-якого заданого значення\(\phi\) дорівнює і протилежний цілим\(\pi\) радіанам пізніше. (Це один із прикладів аргументу симетрії.)
Перший інтеграл в попередньому рівнянні дорівнює\(2\pi\). Таким чином, отримуємо
\[{\bf H}(\hat{\bf z}z) = \hat{\bf z}\frac{I a^2}{2\left[a^2+z^2\right]^{3/2}} \nonumber \]
Зверніть увагу, що результат узгоджується з пов'язаним «правилом правої руки» магнітостатики: Тобто напрямок магнітного поля знаходиться в напрямку згорнутих пальців правої руки, коли великий палець правої руки вирівнюється з розташуванням і напрямком струму. Це хороша вправа, щоб підтвердити, що цей результат також є правильним розмірами.
Рівняння\ ref {M0066_EBS} поширюється прямо на інші розподіли струму. Наприклад, магнітне поле, обумовлене поверхневим струмом\({\bf J}_s\) (базові одиниці СІ А/м) можна обчислити за допомогою Equation\ ref {M0066_EBS} з\(I~d{\bf l}\) заміненням на
\[{\bf J}_s~ds \nonumber \]
де\(ds\) - диференціальний елемент площі поверхні. Це може бути підтверджено розмірним аналізом:\(I~d{\bf l}\) має SI базові одиниці A\(\cdot\) m, як це робить\({\bf J}_S~ds\). Аналогічно, магнітне поле, обумовлене об'ємним струмом\({\bf J}\) (базові одиниці СІ А/м\(^2\)) можна обчислити за допомогою Equation\ ref {M0066_EBS} з\(I~d{\bf l}\) заміненням на
\[{\bf J}~dv \nonumber \]
де\(dv\) - диференціальний елемент обсягу. Для однієї частинки із зарядом\(q\) (SI базові одиниці С) та швидкістю\({\bf v}\) (базові одиниці СІ м/с) відповідною величиною є
\[q{\bf v} \nonumber \]
оскільки C\(\cdot\) м/с\(=\) (C/s)\(\cdot\) m = A\(\cdot\) m У всіх цих випадках рівняння\ ref {M0066_EBS} застосовується з відповідною заміною на\(I~d{\bf l}\).
Зверніть увагу, що величини\(q{\bf v}\)\(I~d{\bf l}\),\({\bf J}_S~ds\), і, всі\({\bf J}~dv\), що мають однакові одиниці A\(\cdot\) m, здається, мають на увазі одну і ту ж фізичну величину. Ця фізична величина відома як поточний момент. Таким чином, «вхід» в BSL можна інтерпретувати як поточний момент, незалежно від того, чи розподіляється цікавить струм як лінійний струм, поверхневий струм, об'ємний струм або просто як рухомі заряджені частинки. Див. «Додаткове читання» в кінці цього розділу для отримання додаткової інформації про поняття «момент» в класичній фізиці.
Додаткове читання:
- «Закон Біот-Саварта» у Вікіпедії.
- «Рівняння Єфіменко» у Вікіпедії.
- «Момент (фізика)» у Вікіпедії.